XiaoMi-AI文件搜索系统
World File Search Systemclosed

官方(已关闭)
1 南洋女子中学,2 Linden Drive,新加坡 288683 2 国家初级学院,37 Hillcrest Rd,新加坡 288913 3 河谷中学,6 Boon Lay Ave,新加坡 649961 4 国防科学技术局,1 Depot Rd,新加坡 109679 ____________________________________________________ 摘要 天气会衰减射频,因此传感器的性能会受到天气的显著影响,天气每天都会变化,并在一年中遵循一定的趋势和模式。本研究利用新加坡的历史天气数据集来分析和推断可以在降雨和温度中观察到的模式,以及随后传感器经历的信号衰减。我们开发了一个机器学习模型,使用 Logistic 回归和 XGBoost 算法来研究温度、风速和日期等参数之间的关系,以预测预期的每日降雨量,从而衡量传感器在特定日期的衰减情况。这可以应用于岛屿防空系统中使用的传感器,并用于优化各种天气条件下的传感器性能。 1 简介 1.1 背景与目标 射频 (RF) 在我们的军事防御中发挥着重要作用,因为电子战 (EW) 中使用的许多传感器都依靠 RF 来接收和发送信号。 EW 对其环境中的威胁信号做出反应,这些信号由接收器检测到,然后进行处理以供操作员识别。 然而,受天气影响的大气气溶胶浓度会衰减射频,导致传感器性能受到影响以及数据不准确。 因此,了解新加坡的气候条件对于找出天气对传感器性能的影响至关重要。 我们的目标是分析新加坡的天气,评估其对射频频谱的影响,并预测降雨量。 此外,我们打算利用机器学习 (ML) 模型来预测天气条件对射频传感器性能的影响。 1.2 射频基础知识 射频是指频率在 3 kHz 至 300 GHz 范围内的振荡频率,相当于无线电波的频率。[1] 转换为 dB 形式

硬壁封闭试验段的改进...
为了实现航空工业的精确气动声学测量,对主要用于气动测试的低速风洞进行了改造,以提供更低的背景噪声环境。根据风洞不同位置的单个麦克风的数据和测试段内的麦克风相控阵测量结果,确定了主要噪声源,并实施了可行的替代方案来降低背景噪声,例如在驱动系统上游安装新的经过声学处理的角叶片和侧壁衬里。还研究了测试段的声学透明概念,结果显示风洞的进一步改进很有希望。给出了风洞不同位置的单个麦克风测量结果以及测试段内波束形成阵列的声压级结果。改进前后的背景噪声测量证实,气动声学测试的能力显著提高,测试段内的噪声降低了 5 dB。

MC-A SANOTONSCT关闭CT关闭
为了防止由促进腐蚀,形成粘液和/或对健康危害的细菌组成的生物膜,我们建议使用Sanosil C或Sanosil Super 25除CORFIT CT CT封闭性STD外。该产品是手动应用的,也可以使用对化学物质抗性的计时器控制的给药泵。

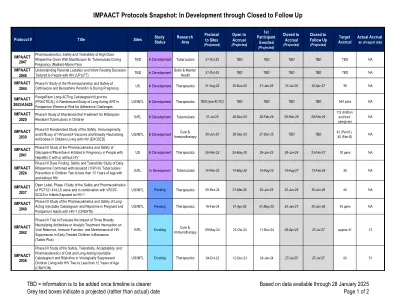
dafne闭环必需品
为什么在dafne闭环必需品中未包括怀孕的闭环使用?使用闭环在怀孕期间对葡萄糖进行管理需要专业团队的投入,以实现不同的葡萄糖目标和个性化的管理计划。DAFNE闭环必需品的重点是使用闭环而不是个性化专家管理确保安全的基本关键技能。
封闭土壤的特征和修复... - ITRC
关于 ITRC 州际技术与监管委员会 (ITRC) 成立于 1995 年,是一个由州领导的全国性联盟,成员来自大约 40 个州和哥伦比亚特区的环境监管机构、三个联邦机构、部落以及公众和行业利益相关者。该组织致力于减少障碍,并加快州际部署更好、更具成本效益的创新环境技术。ITRC 是州环境研究所 (ERIS) 的一个委员会,ERIS 是一个 501(c)(3) 公共慈善机构,通过其旨在改善美国环境的教育和研究活动为州环境委员会 (ECOS) 提供支持,并为州环境政策制定者提供一个论坛。有关 ITRC 及其可用产品和服务的更多信息,请访问互联网 www.itrcweb.org。免责声明本文档旨在帮助监管机构和其他机构制定一致的方法,以评估、监管批准和在特定地点部署特定技术。尽管我们认为本文件中的信息是可靠和准确的,但本文件及其中列出的所有材料均不提供任何明示或暗示的保证,包括但不限于对文件中所含信息的准确性或完整性的保证。任何信息或指导的技术含义均不包含在内。