XiaoMi-AI文件搜索系统
World File Search Systemcompute
媒体版本
Marvell数据加速和卸载研究机构(全球范围内的第一家)为学生,研究人员和行业专业人员提供了最先进的Marvell Technologies。这些包括数据处理器单元(DPU),交换机,Compute Express Link(CXL)处理器和网络接口控制器(NICS)。这些资源对于在AI集群,云环境和网络上加速数据安全,移动,管理和处理至关重要。行业研究表明,在等待网络访问的情况下,最多有三分之一的AI/ML处理时间来解决该计划,旨在解决这种效率低下的问题。该设施的关键功能是Marvell的综合软件解决方案框架的可用性,该框架优化了用于开发Marvell Silicon内的集成数据包处理,密码和AI/ML加速器的解决方案。
印度科学学院(IISC)班加罗尔-560012
1。序言,印度科学学院(IISC)的超级计算机教育与研究中心(SERC)邀请了数据中心基础架构设计顾问的出价,用于创建一个数据中心,用于托管大约8.5个PFLOPS的超级计算。印度科学研究所(IISC)班加罗尔将使用CPU + GPU组合建立能力8.5 PF的数据中心。该数据中心的位置将位于SERC大楼的IISC班加罗尔校园。上述组合的近似计算功率约为500-550 kW。计算的冷却将如下:因为某些计算将在房间冷却,并且一些计算将进行直接接触液体冷却(DCLC),因此冷却是混合的。DCLC节点将与CPU制造商目前可用的最大TDP。IISC Bangalore需要一名设计顾问,用于电气系统,UPS系统,混合冷却系统,I BMS系统等的数据中心基础设施设计。数据中心工作范围(DC)顾问

2020 年技术、媒体和电信预测
这里需要对“电信边缘”一词做些解释。电信边缘计算 (也称为电信公司边缘计算)——图 26 所示的“远边缘网络”——是指由基本上尽可能靠近客户的微型数据中心执行的计算,但这些数据中心由电信公司拥有和运营,并在电信公司拥有的财产上。他们目前使用数据中心式的 AI 芯片 (体积大、价格昂贵、耗电),但随着时间的推移,他们可能会开始采用我们在本章中讨论的一些相同类型的边缘 AI 芯片 (消费者或企业级)。然而,与边缘设备计算不同,电信边缘计算中使用的芯片位于电信公司网络的边缘,而不是实际的终端设备上。此外,并非所有的电信边缘计算都是 AI 计算。据行业分析师称,电信边缘计算市场(包括所有类型的计算,而不仅仅是人工智能)的收入将在 2020 年达到 210 亿美元。这一数字比 2019 年增长了 100% 以上,而且该市场在 2021 年也有望增长 50% 以上。7 该市场按类别的精确细分尚未公开,但分析师认为,人工智能部分在 2020 年可能仍处于相对新兴阶段,收入不超过 10 亿美元,或占电信边缘计算总支出的 5%。8
2020 年技术、媒体和电信预测
术语“电信边缘”在这里需要解释一下。电信边缘计算(也称为电信边缘计算)——图 26 中所示的“远边缘网络”——是指由基本上尽可能靠近客户的微型数据中心执行的计算,但由电信公司拥有和运营,并在电信公司拥有的财产上。他们目前使用数据中心式的 AI 芯片(体积大、价格昂贵且耗电),但随着时间的推移,他们可能会开始采用我们在本章中讨论的一些相同类型的边缘 AI 芯片(消费者或企业)。然而,与边缘设备计算不同,电信边缘计算中使用的芯片位于电信网络的边缘,而不是实际的终端设备上。此外,并非所有电信边缘计算都是 AI 计算。据行业分析师称,电信边缘计算市场(所有类型的计算,而不仅仅是人工智能)的收入将在 2020 年达到 210 亿美元。这比 2019 年增长了 100% 以上,而且市场有望在 2021 年增长 50% 以上。7 该市场按类别的精确细分尚未公开,但分析师认为,人工智能部分在 2020 年可能仍处于相对新兴阶段,收入不超过 10 亿美元,或占电信边缘计算总支出的 5%。8
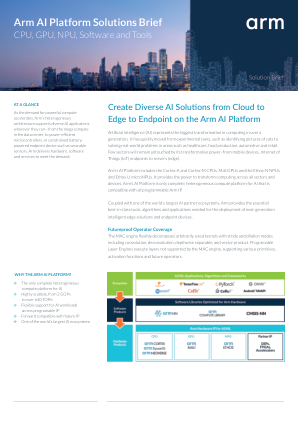
Arm AI 平台解决方案简介 - NET
随着对强大计算的需求不断增长,Arm 的异构架构支持各种 AI 应用程序在任何地方运行 - 从数据中心的大型计算到节能的微控制器,或受限的电池供电端点设备(如可穿戴传感器)。Arm 提供硬件、软件和服务来满足需求。


5G对欧洲经济的影响
新的移动技术对经济和社会产生深远影响。在2009年,第一个4G LTE网络在瑞典启动,在欧洲和全球范围内为无线电信内的指数增长树立了轨迹。1 11年后,5G网络和技术将通过改变现有市场和行业的无线通信进一步彻底改变无线通信。除了升级现有4G的功能(例如更快的视频流)之外,5G还将解锁人工智能(AI),Edge Compute和The Internet(IoT)等技术的新潜力。5G将通过提供丰富的双向通信来对这些技术的成功发挥作用,这有可能支持每平方公里,B和超可靠的亚毫秒响应的100万个设备。c 5G提供的功能使各种用例都可以为经济铺平道路,以实现放大连通性的跨行业益处。


科学技术总监 Lisa Sanders 女士
• 操作员可穿戴计算套件 (OWK)。传感器/边缘计算处理 • 应用程序开发 • 软件定义、任务和硬件无关的架构 • 人机界面(表示层) • 信息实现“……将当前在更高层级分析的产品合成为可在战术边缘消化的产品” • 超视距通信

EPSRC访问高性能计算电话2023
处理器CIRRUS标准计算节点每个包含两个2.1 GHz,18核Intel Xeon E5-2695(Broadwell)串联处理器。这些处理器中的每个内核都支持2个硬件线程(HyperThreads),默认情况下是启用的。CIRRUS上的标准计算节点在两个处理器之间具有256 GB的内存。cirrus gpu计算节点每个都包含两个2.4 GHz,20核Intel Xeon Gold 6148(Skylake)串联处理器。这些处理器中的每个内核都支持2个硬件线程(HyperThreads),默认情况下是启用的。节点还包含四个NVIDIA TESLA V100-PCIE-16GB(VOLTA)GPU加速器连接到主机处理器,并且通过PCIE彼此相互连接。