XiaoMi-AI文件搜索系统
World File Search Systemcontour
双激子级联发射单光子...
图 1 | 单层 WSe 2 中的窄谱线。a,沉积有 WSe 2 单层的设备示意图。 b ,在 56 µ m × 56 µ m 上,能量范围在 1.525eV 和 1.734eV 之间的光致发光强度云图。白色虚线标记了潜在的单层区域。c ,WSe 2 单层中局部发射极在 4.5K 下的光致发光光谱,随着激光功率的增加显示出不同的发射行为,以 1.7167eV(P1)和 1.7206eV(P2)处的峰值为主。d ,P1 和 P2 的提取线宽,以激发功率为函数绘制。低激发功率的光谱显示 P1 和 P2 的线宽分辨率有限。e,P1 和 P2 的光子发射的积分计数随着激光功率的增加显示出超线性和亚线性行为

创伤性脑出血的自适应图像分割
摘要 - 利用计算机技术建立有效的解决方案来提高创伤性脑损伤 (TBI) 诊断的速度和效率是一项挑战。相关文献中提出了几种涉及不同精度和一定程度工作量的分割方法,并对其进行了详细描述。脑图像分割是重要的临床诊断工具之一。本文提出了一种改进的 (MDRLSE) 算法,用于计算机断层扫描 (CT) 图像上的出血分割。利用消除模糊边缘的图像噪声来描绘出血区域的精确边界。所提出的分割技术实现了 97.16% 的准确率。该技术使用基于边缘的轮廓模型进行图像分割,提供简单的窄带以显着降低计算成本。性能结果表明,它对于具有各种特征的脑图像中的 TBI 图像分割是有效的。
双激子的单光子级联发射
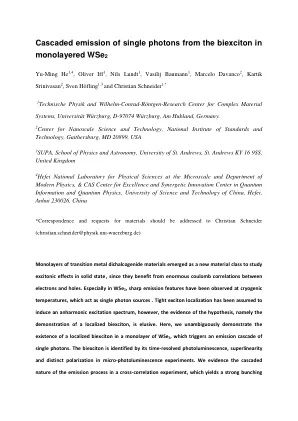
图 1 | 单层 WSe 2 中的窄谱线。a,沉积有 WSe 2 单层的器件示意图。b,56 µ m × 56 µ m 面积上 1.525eV 至 1.734eV 能量范围内光致发光强度的等值线图。白色虚线标记了潜在的单层区域。c,4.5K 时 WSe 2 单层中局部发射极的光致发光光谱,随着激光功率的增加,显示出不同的发射行为,主要峰位于 1.7167eV(P1)和 1.7206eV(P2)。d,P1 和 P2 的提取线宽,以激发功率为函数绘制。低激发功率的光谱显示 P1 和 P2 的线宽分辨率有限。e,随着激光功率的增加,P1 和 P2 的光子发射积分计数显示出超线性和亚线性行为
双激子的单光子级联发射
图 1 | 单层 WSe 2 中的窄谱线。a,沉积有 WSe 2 单层的器件示意图。b,56 µ m × 56 µ m 面积上 1.525eV 至 1.734eV 能量范围内光致发光强度的等值线图。白色虚线标记了潜在的单层区域。c,4.5K 时 WSe 2 单层中局部发射极的光致发光光谱,随着激光功率的增加,显示出不同的发射行为,主要峰位于 1.7167eV(P1)和 1.7206eV(P2)。d,P1 和 P2 的提取线宽,以激发功率为函数绘制。低激发功率的光谱显示 P1 和 P2 的线宽分辨率有限。e,随着激光功率的增加,P1 和 P2 的光子发射积分计数显示出超线性和亚线性行为
双激子的单光子级联发射
图 1 | 单层 WSe 2 中的窄谱线。a,沉积有 WSe 2 单层的器件示意图。b,56 µ m × 56 µ m 面积上 1.525eV 至 1.734eV 能量范围内光致发光强度的等值线图。白色虚线标记了潜在的单层区域。c,4.5K 时 WSe 2 单层中局部发射极的光致发光光谱,随着激光功率的增加,显示出不同的发射行为,主要峰位于 1.7167eV(P1)和 1.7206eV(P2)。d,P1 和 P2 的提取线宽,以激发功率为函数绘制。低激发功率的光谱显示 P1 和 P2 的线宽分辨率有限。e,随着激光功率的增加,P1 和 P2 的光子发射积分计数显示出超线性和亚线性行为


金属辅助互动的性质划分 -
图1。发现MSI方程和预测。(a)开发可衍生的MSI方程,包括数据收集,功能工程,描述符识别和物理推导。(b)收集|𝐸adh |文献中的金属支持系统(金属作为X轴,作为Y轴支撑)。x轴(y轴)中金属(氧化物)的排列是根据其|𝐸adh |进行的。 。(c)(b)恢复的图像通过|𝐸adh |填充白点|由等式预测。1。(d)在| 𝛽2·Mm̅|跨越二维空间内的金属氧化物系统的分布和| 𝛽1·𝑄mo |对于所有考虑的实验金属氧化物系统。轮廓线表示|𝐸adh |的增量在60 mev/Å2。选定的感兴趣的催化系统以不同的颜色突出显示。

站点计划控制 - 参考条款
调查地形调查计划的地形计划显示了站点的现有物理特征。工程师和计划人员使用这些计划来协助开发建议的详细设计,但不是开发应用程序的计划。一个地形调查显示现有条件通常被纳入开发应用的设计图纸中。测量师经常提供地形计划,该计划在地面上和下方显示上述高度,轮廓和物理细节。轮廓是图纸上的线,它们在地面上具有相同高程的点。轮廓线永远不会彼此交叉,越近,彼此之间的距离越陡峭。相反,距离距离越远,彼此之间的距离是斜坡。必须聘请获得许可的安大略省土地测量师以提供地形计划,包括边界信息。绘制信息要求

diffradar:扩散
毫米波(mmwave)雷达由于其稳健性在低光条件下,在环境感知中的越来越多。但是,现有方法无法解决多路径干扰和低分辨率分辨率的挑战。在本文中,我们引入了衍射,该衍射概率模型(DPM)用于高质量的MMWAVE环境感应。为了适应DPM的雷达信号,缺少PIX级的结构信息,我们会签署一个轮廓编码器,以捕获固有的场景特征,使DPM能够从雷达数据中学习强大的表示。然后,DPM解码器利用此高级语义信息有效地重建了现实世界的场景。广泛的实验表明,在各种复杂情况下,我们的APACH超过了最新方法。

第10部分小型钢船船体结构及设备
干舷时船舶长度()为从龙骨顶端量起的85%最小型深水线处首柱前侧至尾端船板后侧的长度(以米为单位)的96%,或为该水线上首柱前侧至舵杆轴线的长度(以米为单位),取较大者。但是,当首柱轮廓在85%最小型深水线以上凹陷时,该长度的前端点应取首柱轮廓最后点在该水线上的垂直投影。对于无舵杆的船舶,干舷船舶长度为从船首前侧到船尾壳板后侧测量的长度的 96%,该长度位于从龙骨顶部测量的最小型深的 85% 处的水线上。测量此长度的水线应与 108 中定义的载重线平行。