XiaoMi-AI文件搜索系统
World File Search Systemcontour
规划和建筑部 - 埃尔多拉多县
显示提出的分级 - 通常使用两种方法之一来完成:深色,较厚的轮廓线叠加(较轻)现有轮廓线;或较厚的线,显示出切割和填充坡度的较厚线(使用刻度绘制斜率)。还指定切割和填充的码数。□提供所提出的结构的饰面高度。□由于建筑计划的这一方面的技术性质,我们建议您拥有设计专业人员(即土木工程师,建筑师或景观建筑师)协助您准备的这一部分。根据几个因素,可能需要土木工程师准备或监督准备计划的准备。

标题互补的测量在拆除基本板上和之后的残余应力中,在复杂的添加性不锈钢valv
摘要。使用中子衍射和轮廓方法的残留应力测量在由316升不锈钢粉制成的阀外壳上进行,并使用激光粉末床融合添加剂制造具有复杂的三维内部特征。测量结果捕获了残留应力场的演变,该状态是将阀外壳连接到底板上的状态,到达壳体从底板上切开的状态。利用此切割,因此使其在此应用中是非破坏性的测量,轮廓方法映射了整个切割平面上的残留应力分量正常的(通过切割完全缓解了这种应力场),以及由于切割而导致的整个壳体中所有应力的变化。中子衍射测量的无损性质启用了在切割前和切割后的构建点的各个点的残余应力测量。在两种测量技术之间观察到了良好的一致性,这两种测量技术表明,在外壳的外部区域中显示了较大的拉伸方向残余应力。轮廓结果表明,从两个不同区域中从底板上移除构建后,多个应力分量发生了很大变化:在平面附近,在该平面附近,从基本板中切开构建,并在充当应力集中器的内部特征附近。这些观察结果应有助于理解基本板附近构建破裂的驾驶机制,并确定对结构完整性的关注区域。中子衍射测量还用于显示基本板附近的剪切应力明显低于正常应力,这是对轮廓方法的重要假设,因为不对称切割。

利用数据分析和机器学习
数据可视化简介 数据可视化的任务 数据可视化的好处 数据可视化的图表 Matplotlib 架构 Matplotlib 的一般概念 MatPlotLib 环境设置 验证 MatPlotLib 安装 使用 PyPlot 格式化图表样式 使用分类变量绘图 带有子图函数的多图表 折线图 条形图 直方图 散点图 饼图 3 维 - 3D 图形绘图 mpl_toolkits MatPlotLib 的函数 等高线图、箭筒图、小提琴图 3D 等高线图 3D 线框图 3D 表面图 箱线图
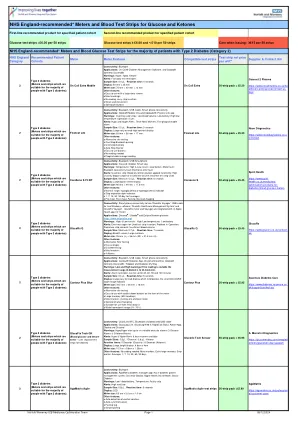
NHS英格兰推荐*米和血液测试...
Connectivity: Bluetooth, USB Cable, Smart phone connectivity Applications: Contour® Diabetes App, GlucoContro.online, Glooko® (formerly Diasend®), Tidepool and Diabetes My Way Warnings: Low and High warnings if the reading is outside the measurement range (0.6mmol/L to 33.3mmol/L).Alerts: Alarm reminders can be set for 30, 60, 90 and 120 minutes Sample Size: 0.6 μL Reaction time: 5 seconds Display: Large easy to read display which incorporates the smartCOLOUR® target range indicator Meter size: 78.5 mm × 56 mm × 18 mm Other features: o Alternative site testing o Easy to use with tactile rubber buttons on the front of the meter o Large memory (800 readings) o Meal markers (禁食,餐后)

计算机视觉应用:实时视频的车辆计数和分类系统
Akshay Narendra Thakare,Palash Kailas Kamble,Kaushik Prabhakar Patil,Triveni Rahangdale Tulsiramji Gaikwad Patil Patil patil patil patil教授,印度纳格布尔摘要:交通分析是城市计划者已经在处理数年的问题。更智能的方法来分析流量并加快过程。交通分析可以在给定时间记录该区域中车辆和车辆类的数量。人们已经开发了数十年的机制,但是大多数涉及使用传感器来计算移动车辆的方向并确定车辆以跟踪车辆数量。尽管该系统随着时间的流逝而成熟并且非常有效,但它们不友好。问题是此类系统需要定期维护和校准。因此,该项目旨在根据视觉计算和对车辆进行分类。该系统涉及使用高斯混合模型(GMM)背景减法捕获视频以检测和计数车辆的帧,然后通过比较具有预测值的轮廓区域来对车辆进行分类。本文的重要贡献是两种分类方法的比较。使用轮廓比较(CC)和特征袋(BOF)方法进行分类。关键字:车辆计数,交通分析,轮廓比较。

项目:ME-JB3-SWT1 超音速风洞设计
图 1. 兰利 11 英寸高速风洞 [4]。© NASA。保留所有权利。 ...................................................... 9 图 2. 兰利 11 英寸 HST 示意图 [3]。© NASA。保留所有权利。 ...................................................... 9 图 3. 进气式超音速风洞的总体配置。 ............................................................................. 12 图 4. 排污式超音速风洞的总体配置 [17] © Wikimedia Commons。保留所有权利 .................................................................................................................... 13 图 5. 超音速扩散器中的冲击波系统 [15]。© Lehrstuhl fur Thermodynamik。保留所有权利。 .................................................................................................................................................... 15 图 6. 超音速喉管下游的特性线 ...................................................................................................... 19 图 7. 拐角处超音速气流引起的膨胀风扇 ...................................................................................... 19 图 8. 某一点的特性几何形状和冲击特性 ...................................................................................... 20 图 9. WPI 真空测试设施 (VTF) ............................................................................................................. 25 图 10. 质量流速与喉管面积的关系。使用公式 4 在 MATLAB 中创建。 ................................................
使用聚类和2D区域生长方法剥去MRI
我们开始特定的质心,并执行2D区域的生长过程,直到它触及另一个质心为止。然后将第二个质心用于进一步的区域生长。我们重复了这个2D区域的生长过程,该过程将所有质心连接起来,在大脑周围具有轮廓,边框厚度约为5像素宽度。然后,我们在轮廓周围形成滑动线。在每个像素上,位于水平线中的像素的平均值并具有质心的值±3的值,最接近平均值作为边界点固定。在每个像素的轮廓周围都重复这一点。连接在每个水平线上选择的点,从而为大脑提供了线边界。该边界被用作标记,并且封闭面罩内部的区域给出了大脑部分。

使用进化量子启发水平集技术自动检测 MRI 脑肿瘤的新型医学分析框架
摘要:准确分割 3D 磁共振成像 (3D-MRI) 中的脑肿瘤对于简化诊断和治疗过程至关重要。在基于能量函数理论的图像分割和分析方法领域,水平集方法已成为一种有效的计算方法,极大地促进了几何活动轮廓模型的发展。使用水平集技术时,减少分割误差和所需迭代次数的一个重要因素是初始轮廓点的选择,这两者在处理脑肿瘤可能具有的各种大小、形状和结构时都很重要。为了定义速度函数,传统方法仅使用图像梯度、边缘强度和区域强度。本文提出了一种受量子启发蜻蜓算法 (QDA) 影响的聚类方法,QDA 是一种受蜻蜓群居行为启发的元启发式优化器,用于准确提取初始轮廓点。所提出的模型采用量子启发计算范式来稳定开发和探索之间的权衡,从而弥补传统基于 DA 的聚类方法的任何缺点,例如收敛速度慢或陷入局部最优。首先,可以使用量子旋转门概念将代理群重新定位到可以更好地实现最优值的位置。然后,通过采用突变程序来增强群体突变并实现其多样性,使主要技术具有强大的局部搜索能力。在将颅骨与大脑分离的初步阶段之后,在 QDA 的帮助下确定肿瘤轮廓(边缘)。MRI 系列的初始轮廓将从这些提取的边缘得出。最后一步是使用水平集分割技术在所有体积段中隔离肿瘤区域。当应用于 BraTS 2019 数据集中的 3D-MRI 图像时,所提出的技术优于最先进的脑肿瘤分割方法,如所获得的结果所示。

对地下道路上爆炸引起的过度和突破的实验和数值研究
越来越多的问题是由于其对建筑成本和运营安全的影响,在地下隧道开挖期间的关键问题。面临跨越和爆破控制面临的一项关键挑战是在制定各种复杂工程条件方面的指南方面的困难。在这项研究中,使用焦点S 150激光扫描仪进行了一系列的越过和突破的领域测量,在中国的Kaiyang磷酸盐矿山的一条深处进行。根据收集到的点云数据准确分析了道路轮廓周围围绕道路轮廓周围的分布和范围。随后,建立了简化的三维模型,以模拟使用显式动态分析代码LS-DYNA的预压道路的爆炸发掘。的数值和测量结果的比较表明,该模型是模拟爆破发掘引起的过渡和未进行的可靠工具。此后,进一步研究了不可控制的地质因素(例如在原位应力条件下以及可控的爆破因子)的影响,包括轮廓孔间隙(S),电荷浓度(B)和解耦合(F)以及茎的脱钩。模拟结果表明,横向压力系数显着影响了过度和突破的分布模式,而应力幅度则导致了它们的范围。本研究的研究发现对类似的爆炸发掘项目具有重要意义。此外,对模拟发现的比较和场测量数据表明,分别在S = 0.70 m,b = 0.9 kg/m和f = 2.5的情况下获得了超爆破和未突破的最小范围。此外,轮廓蓝螺物被沙子造成的石头造成了较小的道路外围岩石质量的损坏,并增强了爆炸能量的利用率。