XiaoMi-AI文件搜索系统
World File Search Systemcybernetics
开创AI研究揭开了肠道健康与思想之间的神秘联系
名誉教授Roustem Miftahof博士于1980年获得了喀山医学研究所的荣誉,并于1980年获得了喀山医学研究所的荣誉,数学数学学士学位和网络网络学学士学位,并于1981年获得Kazan联邦大学的荣誉。后来他在1989年获得了技术科学博士学位。在他的杰出职业生涯中,麦法霍夫博士在北美,欧洲,中东和远东地区曾担任过各种学术职务。他还曾担任阿斯利康(Astrazeneca)的顾问,并在爱荷华大学医院和诊所工作。目前,他专注于脑刺轴的数学建模。Miftahof博士撰写了八本书,16个书籍和150多个科学出版物。他的研究专业知识在于复杂生物系统的计算生物学,生物力学和数学建模。
机器智能 - 哥伦比亚心理学系
办公时间:在线,通过约会讲师,讲师是自然机器智能的高级编辑,这是一本关于人工智能,机器学习和机器人技术的科学杂志。他拥有爱荷华大学的心理学学士学位,明尼苏达大学的神经科学博士学位以及纽约大学认知神经科学的博士后培训。 他曾在纽约大学哥伦比亚大学和明尼苏达大学担任教职员工。 课程公告描述该研讨会将从心理学,神经科学和计算机科学等领域以及网络论,人工智能,机器人技术,连接性,神经网络,机器学习和深度学习等方法调查机器智能中的历史和现代发展。 重点是对主题的概念理解。 该课程不包括计算机编程和统计信息的背景。 一个总体目标是让学生成为知情的人工智能应用程序。 详细描述了研讨会的目标是对机器智能有更深入的了解。他拥有爱荷华大学的心理学学士学位,明尼苏达大学的神经科学博士学位以及纽约大学认知神经科学的博士后培训。他曾在纽约大学哥伦比亚大学和明尼苏达大学担任教职员工。 课程公告描述该研讨会将从心理学,神经科学和计算机科学等领域以及网络论,人工智能,机器人技术,连接性,神经网络,机器学习和深度学习等方法调查机器智能中的历史和现代发展。 重点是对主题的概念理解。 该课程不包括计算机编程和统计信息的背景。 一个总体目标是让学生成为知情的人工智能应用程序。 详细描述了研讨会的目标是对机器智能有更深入的了解。他曾在纽约大学哥伦比亚大学和明尼苏达大学担任教职员工。课程公告描述该研讨会将从心理学,神经科学和计算机科学等领域以及网络论,人工智能,机器人技术,连接性,神经网络,机器学习和深度学习等方法调查机器智能中的历史和现代发展。重点是对主题的概念理解。该课程不包括计算机编程和统计信息的背景。一个总体目标是让学生成为知情的人工智能应用程序。详细描述了研讨会的目标是对机器智能有更深入的了解。
系统生物学基础
系统生物学旨在从系统层面理解生物系统。由于多个领域的进步,它是生物学中一个不断发展的领域。最关键的因素是分子生物学的快速进步,以及对 DNA 序列、基因表达谱、蛋白质-蛋白质相互作用等进行全面测量的技术。随着生物数据流的不断增加,现在几乎可以认真尝试将生物系统理解为系统。处理这种高通量实验数据对计算机科学提出了很高的要求,包括数据库处理、建模、模拟和分析。半导体技术的显著进步带来了能够支持系统级分析的高性能计算设施。这不是第一次进行系统级分析的尝试;过去曾有过几项努力,其中最引人注目的是诺伯特·维纳在30多年前提出的控制论或生物控制论。由于当时对分子水平的生物过程的理解有限,大多数工作都是对生理过程的现象学分析。也有生化方法,如代谢控制分析,虽然仅限于稳态流,但它已成功用于探索生物代谢的系统级特性。系统生物学与所有其他新兴科学学科一样,建立在多种共享愿景的努力之上。然而,系统生物学与过去的尝试不同,因为我们第一次能够基于分子水平的理解在系统水平上理解生物学,并创建一个以分子水平为基础的一致知识体系。另外,需要注意的是,系统生物学是系统级研究的生物学,而不是试图将某些教条原则应用于生物学的物理学、系统科学或信息学。当该领域在未来几年成熟时,系统生物学将被描述为系统级生物学领域,广泛使用尖端技术和高度自动化的高通量精密测量,结合复杂的计算工具和分析。系统生物学显然包括实验和计算或分析研究。然而,系统生物学并不是分子生物学和计算科学的简单结合来逆转
反身控制理论 - 多利亚
本研究的目的是确定反身控制的含义、如何应用反身控制以及应用反身控制的方法。本研究将反身控制与更广泛的系统理论概念相结合,作者还从西方原始资料中很少讨论的角度研究了问题。同时,作者还通过大量使用公开的俄罗斯和西方文件,试图减少围绕该主题的神秘气氛,这种神秘气氛往往是西方辩论的特征,而且很可能是毫无根据的。为了了解反身控制背后的原因,作者讨论了控制论与系统理论之间的接口。本研究重点关注反身系统,这是这些概念的一种表现形式,其中系统试图根据对手使用的类似系统调整其运行。换句话说,它试图在自己的活动中反映对方的系统。本研究回顾了苏联时期这一概念的发展,并总结了苏联解体后俄罗斯该领域的发展。作者回顾了反身控制的历史,并结合俄罗斯关于战争性质及其对军事决策影响的辩论,讨论了其概念和应用。本研究利用这些原则提出了一个反身控制的综合模型。在研究结束时,作者将本研究的结果置于更广泛的背景下。结论证实了俄罗斯正在分析对手所有作战层面的指挥和控制系统的假设。因此,这些活动完全基于机会主义的可能性极小。相反,正如本研究表明的那样,俄罗斯试图隐瞒更高层次的战略是一个更可能的解释。在结论中,作者还指出,俄罗斯信息作战方法中的假设(源于客观世界观)是,当特定信息通过特定信息渠道输入时,可以预期反应。这与西方的想法不同。这种差异也可能解释了西方研究人员在研究俄罗斯信息作战时面临的一些挑战。关键词:指挥与控制、控制论、决策、信息战、反身控制、反身性、俄罗斯、苏联、系统、系统理论

人工智能在...领域的未开发潜力
兽医学是一门广泛且不断发展的学科,包括伴侣动物健康、人口医学和人畜共患疾病以及农业等主题。同样,人工智能 (AI) 涉及许多科学领域,包括哲学、数学、神经科学、控制理论和控制论、计算机工程和数据科学。这两个广泛且不断发展的领域的交集有可能使一个领域对另一个领域产生巨大的影响:AI 在兽医学中的应用几乎是无限的,反过来,兽医学 AI 的进步可以影响和促进 AI 在相邻领域的进步。在 JAVMA 5 月刊的配套文章中,我们简要介绍了 AI 的定义和概念。在本文中,我们将更深入地了解 AI 的基础以及它目前在兽医学中的应用,并讨论了兽医学中的机遇。更具体地说,我们对人工智能和兽医学的新兴趋势以及本出版物读者感兴趣的其他主题提供了一些见解。

Konstantinos Tsiakas 和 Dave Murray-Rust。2022 年。使用人机交互和可解释的人工智能设想新的未来工作实践。
[1] Imran Ahmed、Gwanggil Jeon 和 Francesco Piccialli。2022 年。从人工智能到工业 4.0 中的可解释人工智能:关于什么、如何和在哪里的调查。IEEE 工业信息学汇刊 (2022)。[2] Saleema Amershi、Dan Weld、Mihaela Vorvoreanu、Adam Fourney、Besmira Nushi、Penny Collisson、Jina Suh、Shamsi Iqbal、Paul N Bennett、Kori Inkpen 等人。2019 年。人机交互指南。在 2019 年计算系统人为因素 chi 会议论文集上。1–13。[3] ]castillo2019study José Castillo、Edith Galy、Pierre Thérouanne 和 Raoul Do Nascimento。[n. d.]。研究使用数字技术在工作场所产生的心理工作量和压力。在 H-Workload 2019:第三届人类心理工作量国际研讨会:模型和应用(正在进行的工作)中。105。[4] Chien-Chun Chen、Chiu-Chi Wei、Su-Hui Chen、Lun-Meng Sun 和 Hsien-Hong Lin。2022。AI 预测能力模型以最大化工作绩效。控制论与系统 53, 3 (2022), 298–317。

数字孪生:价值、挑战和推动因素 - arXiv
摘要 — 数字孪生可以定义为复杂物理系统的自适应模型。计算管道、多物理场求解器、人工智能、大数据控制论、数据处理和管理工具的最新进展使数字孪生的前景及其对社会的影响更接近现实。数字孪生现在是许多应用中一个重要且新兴的趋势。也称为计算巨模型、设备影子、镜像系统、化身或同步虚拟原型,毫无疑问,数字孪生不仅在我们设计和操作信息物理智能系统的方式中发挥着变革性的作用,而且在我们如何推进多学科系统的模块化以解决当前进化建模实践未解决的基本障碍方面也发挥着变革性的作用。在本文中,我们回顾了与数字孪生构建相关的方法和技术的最新现状。我们的目标是详细介绍当前的挑战和支持技术,并为各利益相关者提供建议和反思。
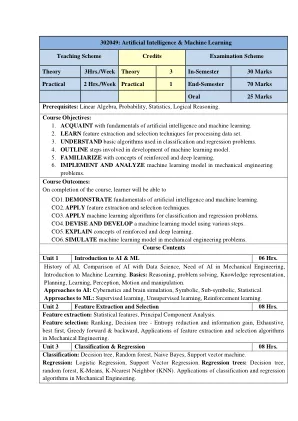
302049:人工智能与机器学习
单元1 AI和ML 06小时的简介。AI的历史,AI与数据科学的比较,机械工程中的AI需要,机器学习简介。 基础:推理,解决问题,知识表示,计划,学习,感知,运动和操纵。 AI的方法:控制论和脑模拟,符号,亚符号,统计。 ML的方法:监督学习,无监督的学习,强化学习。 单元2特征提取和选择08小时。 特征提取:统计特征,主成分分析。 功能选择:排名,决策树 - 熵减少和信息增益,详尽,最佳,贪婪的前向和向后,功能提取的应用和选择算法在机械工程中。 单元3分类和回归08小时。 分类:决策树,随机森林,天真的贝叶斯,支撑向量机。 回归:逻辑回归,支持向量回归。 回归树:决策树,随机森林,K-均值,K-Nearest邻居(KNN)。 机械工程中分类和回归算法的应用。AI的历史,AI与数据科学的比较,机械工程中的AI需要,机器学习简介。基础:推理,解决问题,知识表示,计划,学习,感知,运动和操纵。AI的方法:控制论和脑模拟,符号,亚符号,统计。ML的方法:监督学习,无监督的学习,强化学习。单元2特征提取和选择08小时。特征提取:统计特征,主成分分析。功能选择:排名,决策树 - 熵减少和信息增益,详尽,最佳,贪婪的前向和向后,功能提取的应用和选择算法在机械工程中。单元3分类和回归08小时。分类:决策树,随机森林,天真的贝叶斯,支撑向量机。回归:逻辑回归,支持向量回归。回归树:决策树,随机森林,K-均值,K-Nearest邻居(KNN)。机械工程中分类和回归算法的应用。

302049:人工智能与机器学习
单元 1 人工智能与机器学习简介 06 小时人工智能的历史、人工智能与数据科学的比较、机械工程中人工智能的需求、机器学习简介。基础知识:推理、问题解决、知识表示、规划、学习、感知、运动和操纵。人工智能方法:控制论和大脑模拟、符号、亚符号、统计。机器学习方法:监督学习、无监督学习、强化学习。单元 2 特征提取与选择 08 小时特征提取:统计特征、主成分分析。特征选择:排名、决策树 - 熵减少和信息增益、穷举、最佳优先、贪婪前向和后向、特征提取和选择算法在机械工程中的应用。单元 3 分类与回归 08 小时分类:决策树、随机森林、朴素贝叶斯、支持向量机。回归:逻辑回归、支持向量回归。回归树:决策树、随机森林、K-Means、K-最近邻(KNN)。分类和回归算法在机械工程中的应用。
环境友好能源与应用(EFEA 2022)
控制及其在电力转换器和风能系统中的应用 在加入诺森比亚大学之前,高博士分别在纽卡斯尔大学、利物浦大学、莱斯特大学、曼彻斯特大学、杜伊斯堡-埃森大学和天津大学担任研究和学术职务。高博士是IEEE高级会员和HEA会士,2004年获得亚历山大·冯·洪堡研究奖学金。高博士现为IEEE Transactions on Systems, Man, and Cybernetics: Systems、IEEE Transactions on Industrial Informatics、IEEE Transactions on Industrial Electronics、IEEE Transactions on Automatic Control、ISA Transactions (Elsevier)、Journal of Ambient Intelligence and Humanized Computing (Springer)、IEEE Access的副主编,以及Renewable Energy (Elsevier)的编委会成员。他的研究兴趣包括状态监测与故障诊断、容错设计和控制、机器学习和数据驱动方法及其在风力涡轮机系统、电力转换器、电力系统、陆上和海上可再生能源系统中的应用。