XiaoMi-AI文件搜索系统
World File Search Systemdc

DC变压器用于直流分布和传输
Yingzong Jiao获得博士学位。中国Zhejiang大学(ZJU)的电气工程学士学位,目前是Harbin Technology(HIT)的电气工程与自动化学院的助理教授。 他是与DC可再生收藏和DC/DC电源转换有关的5个研究项目的PI。 他在电力电子和电力系统领域发表了10多篇期刊论文,这些论文与可再生能源集成在一起。 在PEDG2023和EPE2023的会议上,他获得了HVDC 2020会议上的最佳纸张奖。 Ning Wang(IEEE学生会成员)获得了学士学位 硕士学位,中国达利安海洋大学的学位,硕士学位 毕业于中国哈尔滨理工学院(HIT),2023年。 他目前正在攻读博士学位。电力电子学位。 他当前的研究兴趣包括高功率DC变压器,MVDC收集/分配系统以及中频变压器的设计。Yingzong Jiao获得博士学位。中国Zhejiang大学(ZJU)的电气工程学士学位,目前是Harbin Technology(HIT)的电气工程与自动化学院的助理教授。他是与DC可再生收藏和DC/DC电源转换有关的5个研究项目的PI。他在电力电子和电力系统领域发表了10多篇期刊论文,这些论文与可再生能源集成在一起。在PEDG2023和EPE2023的会议上,他获得了HVDC 2020会议上的最佳纸张奖。Ning Wang(IEEE学生会成员)获得了学士学位 硕士学位,中国达利安海洋大学的学位,硕士学位 毕业于中国哈尔滨理工学院(HIT),2023年。 他目前正在攻读博士学位。电力电子学位。 他当前的研究兴趣包括高功率DC变压器,MVDC收集/分配系统以及中频变压器的设计。Ning Wang(IEEE学生会成员)获得了学士学位硕士学位,中国达利安海洋大学的学位,硕士学位毕业于中国哈尔滨理工学院(HIT),2023年。他目前正在攻读博士学位。电力电子学位。他当前的研究兴趣包括高功率DC变压器,MVDC收集/分配系统以及中频变压器的设计。
Pepco-CREF-Petition-.pdf - 华盛顿特区 - OAG DC
同样,DOEE 最近的公用事业负担研究发现:“低收入家庭的能源负担比非低收入家庭高 4.5 倍”;“黑人和西班牙裔家庭的中位能源负担比白人(非西班牙裔)家庭高 45%”;“在华盛顿特区都会区,64%的低收入家庭面临高能源负担(超过 6%),40%的低收入家庭面临严重的能源负担(超过 10%)”;并且,“四分之一(25%)的低收入家庭承受着至少 15%的能源负担,是华盛顿特区都会区中位数的 7.5 倍。” 《对地区居民对公用事业负担和可负担性计划体验的调查》,美国能源效率经济委员会 (2021),网址为:https://doee.dc.gov/sites/default/files/dc/sites/ddoe/service_content/attachments/Report_An%20Examination%20of %20District%20Residents%E2%80%99%20Experiences%20with%20Utility%20Burdens%20and%20Affordability %20Programs.pdf。

Energys DC/DC 50.12/24
Energys DC/DC保持双电池电气系统(辅助电池和起动器电池)的健康状况。通过同时在车辆上同时使用交流发电机和太阳能电池板,它在移动时为您的辅助电池提供了最佳电荷。它还可以使您的电池在冬季存放期间充电。一个充电器,电池隔离器和太阳能调节器一起来,这是长途旅行时要安心的必不可少的配件,无论您可能远离您可能是电源。

用于航空航天的高功率双向 DC-DC 转换器...
通过提出一个新模型,可以计算出器件电流均方根和平均电流以及电感/变压器电流均方根和峰值的方程,从而提高双向双有源桥 (DAB) 直流-直流转换器的效率。这些方程有助于预测器件和无源元件中的损耗,并有助于转换器设计。在考虑缓冲电容器对 DAB 转换器的影响的同时,还分析了降压和升压模式下的零电压开关 (ZVS) 边界。所提出的模型可用于预测任何所需工作点的转换器效率。新模型可作为 DAB 硬件设计(器件和无源元件选择)、软开关工作范围估计和设计阶段性能预测的重要教学兼研究工具。DAB 直流-直流转换器的运行已通过大量模拟验证。基于所提出的模型设计了一个 DAB 转换器原型,并用于航空航天储能应用。实验结果验证了新模型在 7 kW、390/180 V、20 kHz 转换器运行和 ZVS 边界运行中的有效性。

双向DC/DC转换的开发与双...
抽象 - 混合动力汽车(HEV)提供了许多好处,例如高燃油效率,减少排放和嘈杂的服务。两到三个频率总线可用于各种操作用途。需要连续变量DC-DC转换器电化学盟友以连接单独的DC电压总线并将能量向后和向前传递。在本报告中,提出了电池连接的电动电机驱动器,并在电动模式和重新破坏模式下充电和放电功能转换器。使用三个二次交换开关来充电和排放拓扑中连接的battries。拓扑由两个电压水平不同的电池组成,一个电池为96V,另一个则为48V,相对于控制器中给出的参考值排放或充电。控制器是一个PI增益控制器,它可以计算转换器中连接的SWICHES的占空比。使用MATLAB SIMULINK软件运行的不同模式下的开关以非常高的频率生成PWM脉冲。使用转换器的OUPUT电压用于运行感应电动机,并且通过相对于时间生成的图观察到了机器的宪章。电动和混合动力汽车的DC-DC转换器的所有关键规格都是高性能,尺寸小,轻巧和耐用性。关键字 - 混合动力汽车,MATLAB,DC/DC转换器,PI增益控制器
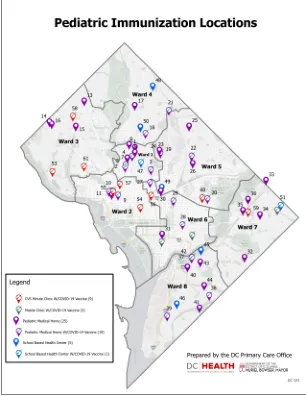
DC小儿免疫地点-DC Health
1。儿童保健中心:哥伦比亚高地3336 14 TH St.希望社区:Marie Reed Health Center Covid-19疫苗2250 Champlain St.霍华德大学教师实践计划科学诊所Covid-19疫苗2041乔治亚大街,西北3300 RM 3300华盛顿特区,20060年(202)865-3006星期一至周一至周五8:00 AM - 5:00 AM - 5:00 PM COVID疫苗:Covid疫苗:La Clinica del Pueblo Covid-19疫苗2831 2831 15 th St.玛丽的中心:亚当斯·摩根·库维德(Adams Morgan Covid)19疫苗2333安大略省华盛顿州西北部,华盛顿特区20009(844)796-2797星期一 - 星期一至星期五上午9:00 am - 5:00 pm 6。西班牙天主教慈善机构1618 Monroe St.
华盛顿特区
我们的项目通过住院、门诊和临床药房服务提供联邦医疗保健系统的多样化体验。该计划提供学习“这是华盛顿特区退伍军人事务部的美好一天!”。华盛顿特区退伍军人事务医疗中心 (VAMC) 药房服务在过去几年中一直在提高提供高质量药房服务的能力。成就包括增加运营人员数量、增加临床人员数量、获得 Script Pro(一种工作流程管理系统)以及重建我们的静脉注射室,使其符合 USP 797/800 标准并方便用户使用。此外,我们在全国各地的各种会议上进行了多次全国性演讲。最后但并非最不重要的是,我们有一个住院医师计划,该计划根据住院医师的需求量身定制,并且足够灵活,可以支持这些住院医师利益的不确定变化。华盛顿特区退伍军人事务医疗中心很自豪能够在 90 年代末开始我们的 PGY1 住院医师计划。该计划自 1997 年 6 月 4 日起获得美国卫生系统药剂师协会的认证资格。华盛顿特区退伍军人事务医疗中心药房住院医师计划与 20 多所学校有关联/ 全国各地的药学院和医院,包括霍华德大学、芝加哥州立大学、默瑟大学和联合纪念医院等。

华盛顿特区
联邦政策办公室 - 华盛顿特区关于美国西部哈林环境行动A/K/A我们对环境正义的行动是一个基于社区的非营利性倡导组织,该组织致力于确保有色人种和/或低收入居民的人们有意义地参与声音和公平的环境健康,保护政策和保护政策和惯例,以建立健康的社区。我们的法案是环境正义运动(EJ)运动的全国认可领导者,并以其在儿童环境健康领域的工作而闻名;政府问责制;和气候,能源和环境正义。我们在社区中的深层根源,政策影响的记录,诚信和声誉的记录正在推动明年的指数增长,包括在我们的联邦政策办公室中。我们是唯一在华盛顿特区永久存在的国家EJ组织。我们新近铸造的五年战略计划概述了联邦政策战略,包括推进和改革新的国家政策,实践和法规;支持现有政策的政策实施和监管工作,以确保问责制;召集联盟,组织和研究人员推动共享的国家EJ议程;建立强大的叙事来催化国家EJ运动;并充当连接器,居民和技术援助提供商,以将EJ组织的能力纳入强大的,具有凝聚力的民族运动。根据Jemez原则,我们认为社区必须为自己说话。我们在社区参与和激活,政策,研究和教育的交汇处工作。我们将长期社区成员,有色社区,低收入社区以及最重要的是那些在历史上被边缘化并受到环境和其他形式的种族主义和排斥的人的声音优先考虑。我们的行动利用我们在桌子上的位置来推动系统参与者,包括民选官员,大绿党,联盟和盟友,以中心种族正义和公平。关于我们所做的角色是寻求一位环境正义研究分析师,对我们的联邦政策办公室表现出了对正义和公平问题的热情。该个人向联邦监管事务经理报告,并将进行研究,数据收集和分析,以告知我们在地方/州和国家一级推动公平和公正的气候,运输,能源和毒物政策和实践的努力。EJ研究分析师的工作将用于备忘录,报告,图表和幻灯片,使政策团队能够分析,建立和解释气候和能源模型,并为倡导和联盟建设工作提供信息。