XiaoMi-AI文件搜索系统
World File Search Systemdim
附录 A 符号、缩写和首字母缩略词
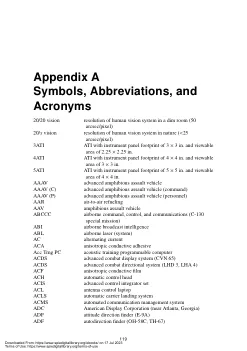
昏暗房间中人眼视觉系统的 20/20 视觉分辨率(50 角秒/像素) 自然界中人眼视觉系统的 20/x 视觉分辨率(< 25 角秒/像素) 3ATI 仪表板占用空间为 3 × 3 英寸、可视区域为 2.25 × 2.25 英寸的 ATI 4ATI 仪表板占用空间为 4 × 4 英寸、可视区域为 3 × 3 英寸的 ATI 5ATI 仪表板占用空间为 5 × 5 英寸、可视区域为 4 × 4 英寸的 ATI AAAV 先进两栖攻击车 AAAV (C) 先进两栖攻击车(指挥) AAAV (P) 先进两栖攻击车(人员) AAR 空中加油 AAV 两栖攻击车 ABCCC 机载指挥、控制和通信(C-130 特殊任务) ABI 机载广播情报 ABL 机载激光(系统) AC交流电 ACA 各向异性导电胶 Acc Trng PC 声学训练可编程计算机 ACDS 先进战斗显示系统(CVN 65) ACDS 先进战斗定向系统(LHD 3、LHA 4) ACF 各向异性导电膜 ACH 自动控制头 ACIS 先进控制积分器组 ACL 天线控制笔记本电脑 ACLS 自动航母着陆系统 ACMS 自动通信管理系统 ADC 美国显示公司(佐治亚州亚特兰大附近) ADF 姿态测向仪(E-9A) ADF 自动测向仪(OH-58C、TH-67)

Movers Shakers - 罗伯逊农场
什么帮助你应对了这些挑战?我通过两种方式克服了这些挑战。第一,作为一名女性,我不怕问路。我爸爸一直是我的顾问,从喷雾泵的运转到运输的物流。比尔·迪森一直是我所有与挖掘有关问题的导师。但是当解决变化无常的大自然带来的问题时,我会咨询互联网。互联网是与虫子或疾病有关的一切信息的丰富来源。只需在谷歌上搜索你需要的东西,你就会得到俄亥俄州立大学推广部、普渡大学州立大学推广部、密苏里州立大学推广部和其他几十个机构的每一份报告。你甚至可以在 YouTube 上找到这种疾病的视频。如果你需要化学标签来确定使用率,它就在那里。我一直在说,现在的孩子不知道他们的生活有多轻松。过去(不想暴露我的年龄),我们常常需要翻阅厚厚的书,希望找到想要的虫子或疾病,然后再查阅另一本书,试图弄清楚要喷洒什么化学品,然后打电话给制造商,看看能否拿到标签,看看它是否可以用在树上。现在不用了!谷歌!而且是免费的!
CISCOM用户手册
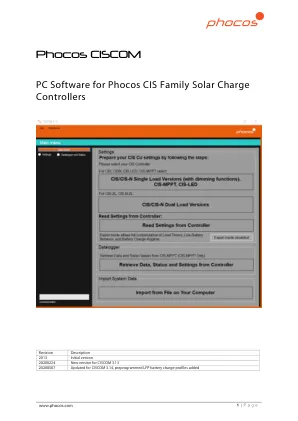
电压控制的LVD仅考虑电池电压。当控制器测量设置下方的电池电压几分钟时,它将断开(或调暗)负载。SOC控制的LVD考虑电池电压和负载电流。当负载电流高时,控制器将在断开连接(或调光)之前等待较低的电池电压,并且在断开连接(或调光)之前将等待更长的时间。SOC设置很有价值,因为仅电池电压并不是电池电量状态的完整指标。电池电压必须低于设置超过2分钟,而LVD或低电压调光最多30分钟才能生效。低电压调光设置必须高于LVD设置才能生效。重要:为12V电池编程所有设置。CIS电荷控制器将自动检测12或24V电池,并自动调整24V系统的设置。要确定SOC设置将何时应用,您需要知道负载电流消耗和控制器的负载电流等级。例如,CIS-N-MPPT-85/20的额定值为20A。如果连接的路灯消耗14A,则控制器的标称当前容量为70%或0.7。如果选择了SOC4,则下图显示电池电压必须降至11.55V以下,才能使控制器实现LVD。也有时间延迟。

通过增强发色团填充的计算设计生成明亮的单体红色荧光蛋白
同时为定向进化更亮的变体提供了新模板。荧光蛋白的亮度被定义为它们的摩尔消光系数与量子产率的乘积,它们分别是它们的发色团吸收光的能力和将吸收光转换成发射光的效率。虽然增加这两个性质中的任何一个都会成比例地增加亮度,但是人们还不太了解 RFP 结构的变化如何有益地影响它们的消光系数,这使得通过合理设计预测有益突变变得复杂。另一方面,已知荧光团的量子产率与它们的构象灵活性直接相关,8 – 10 因为运动会将吸收的能量以热量而不是光子的形式耗散。对于荧光蛋白,研究表明,通过亚甲基桥的扭转,发色团对羟基苯亚甲基部分的扭曲会导致非辐射衰减。10,11 因此,应该可以通过设计突变来限制对羟基苯亚甲基部分的构象灵活性,从而提高 RFP 亮度,从而提高量子产率。在这里,我们使用 Triad 软件 12 进行计算蛋白质设计,以优化暗淡单体 RFP mRojoA(量子产率 = 0.02)中发色团口袋的包装,我们假设这会使发色团变硬,从而提高量子产率。为此,对发色团对羟基苯亚甲基部分周围的残基进行了突变

学习无碰撞的高速腿部运动
图1。我们提出的框架ABS展示了敏捷和无碰撞的运动能力,其中具有全部计算和感应的机器人可以安全地浏览混乱的环境,并迅速对室内和室外的多样化和动态障碍做出迅速反应。ABS涉及双政策设置:底部的绿线表示敏捷政策的控制,红线表示运行中的恢复策略。敏捷政策使机器人能够在障碍物中快速运行,而恢复政策可以使机器人摆脱敏捷政策可能失败的风险案例。子图:(a)机器人躲避了摇摆的人腿。(b)敏捷政策使机器人能够以3的峰值运行。1 m/s。(c)在高速运动期间,机器人躲避了移动的婴儿车。(d)机器人在白雪皑皑的地形中躲过一个动人的人。(e)机器人安全地在大厅内坐着静态和动态障碍物,平均速度为2。1 m/s,峰速度为2。9 m/s。(f)机器人避免在昏暗的走廊中的障碍和移动人类,平均速度为1。5 m/s,峰值速度为2。5 m/s。 (g)机器人,平均速度为2。 3 m/s,峰值速度为3。 0 m/s,避免移动和静态垃圾箱,并爬上草坡。 视频:请参阅网站。5 m/s。(g)机器人,平均速度为2。3 m/s,峰值速度为3。0 m/s,避免移动和静态垃圾箱,并爬上草坡。视频:请参阅网站。

实施计算机视觉以翻译语言字母
摘要这项研究是由社会在通过手语与言语障碍的人交流的挑战所激发的。尽管手语是对语音社区的重要交流手段,但公众中的许多人不了解手语,使个人之间的互动困难。本研究旨在通过实施计算机视觉技术来克服这些障碍,以通过Android应用将SIBI手语转化为文本。该研究方法涉及通过采访,文献研究和系统开发的数据收集。机器学习培训作为应用程序的后端使用CNN算法,该算法将以张紧型模型存储在tflite格式中。使用SIBI字母数据训练模型的结果的准确性约为81.48%。应用程序测试表明,在明亮的房间条件下,申请准确性达到81.48%,但在昏暗条件下降至76.92%,在户外80.77%的光线充足。该应用程序很难在弱光条件下识别手姿势。本研究的结论提供了建议,通过将数据首先处理成负面或为应用程序添加照明功能,以提高昏暗条件的准确性。希望该应用程序可以为那些难以通过SIBI手语与聋人交流的人们提供解决方案。Metode Penelitian Melibatkan Pengumpulan Data Melalui Wawancara Dan Studi文学,Serta Pengembangan Sistem Menggunakan Pendekatan敏捷。关键字:CNN算法,手语,SIBI,计算机视觉,Android摘要这项研究是由社区在与具有标志的个人交流的挑战所激发的。尽管手语是一种对说话社区社区很重要的交流手段,但公众中的许多人不了解手语,因此很难在个人之间进行互动。本研究旨在通过实施计算机视觉技术来克服这些障碍,以通过Android应用将SIBI手语转化为文本。使用CNN算法作为后端应用程序的机器倾斜训练将以.tflite格式存储为TensorFlow模型。使用SIBI字母数据数据的模型培训结果的准确性约为81.48%。应用程序测试表明,在明亮的房间条件下,申请准确性达到81.48%,但在昏暗条件下降至76.92%,在户外80.77%的光线充足。应用程序难以在弱光条件下识别手姿势。结论本研究通过将数据处理为负面或在应用程序中添加照明功能来提高昏暗条件的准确性。希望该应用程序可以为与SIBI手语沟通困难的人们提供解决方案。关键字:CNN算法,手语,SIBI,计算机视觉,Android

绿色LGU-开发计划署评估资源中心
ACE Project Accelerating [NDC] for Circular Economy Project Alab Accelerator Lab CCC Climate Change Commission CE Circular Economy CPD Country Programme Document CEPS Centre for European Policy Studies CSO Civil Society Organization DENR Department of Environment and Natural Resources DILG Department of Interior and Local Government DIM Direct Implementation Modality DOE Department of Energy DRR Disaster Risk Reduction DRR - UNDP Deputy Resident Representative DTI Department of Trade and Industry EC European Commission EPPIC Ending塑料污染创新挑战EPR扩展生产者责任欧盟欧盟GDP国内生产总值GEDSI性别平等,残疾和社会包容性GHG温室气体GHACT CORNASINE CORNAIMINE CANES转移ICE TRANSS ICE TRANSS ICE TRANS of CICE HUB for CICE HUB for CINCULAL ECANCOL MRF Materials Recovery Facility MSW Municipal Solid Waste MT Metric tonne NDC Nationally Determined Contribution NEDA National Economic and Development Authority NPOA National Plan of Action NSWMC National Solid Waste Management Commission OEs Obliged Enterprises (OEs) OECD Organisation for Economic Co-operation and Development PMU Project Management Unit PROs Producer Responsible Organizations R&D Research and Development ROAR Results Oriented Annual Report RQT Results Quality Team SCPAP Sustainable Consumption and Production Action计划特定的目标SP战略计划攻击技术和行政规定UMI上级收入
使用 Unitree A1 四足机器人构建基于视觉的 AI 演示器
展示人工智能 (AI) 能力的挑战之一是找到有效的方式来以切实的方式展示其能力。在本文中,我们使用 Unitree A1 四足机器人展示了一个基于视觉的 AI 演示器。该演示器旨在供苏黎世应用科技大学人工智能中心 (CAI) 使用,以在现实环境中展示 AI 的能力,例如展览。为了实现这一点,我们开发了一个应用程序,允许机器人响应四种特定的手势。该软件从机器人的集成摄像头接收实时图像,并利用 MediaPipe 框架进行手部跟踪和界标点生成,这些界标点实时显示在远程 PC 上。我们根据 3768 个手势记录训练的逻辑回归模型随后会检测站在机器人前面的用户做出的手势。该模型与机器人的系统进行通信,允许通过用户界面控制其检测和姿势。在我们的实验室测试中,机器人展示了每个手势的平均准确率为 91%。然而,我们发现在强光或弱光环境中,机器人的性能不太可靠,准确率仅为 70%。为了提高机器人在这些条件下的性能,我们建议实施额外的算法或微调 MediaPipe 管道。总的来说,我们的演示器为 CAI 部门提供了一个展示 AI 的宝贵工具,因为它允许观众使用直观的手势与机器人互动,并通过观察机器人的即时反应来亲身体验 AI。

Protec Micro | Dextra组
警告:必须对照明器进行接地。如果拆除盖子,则LED板的电击风险。灯具外部的安装 /操作预期的示波器无效保修。仅适用于EN55015范围内的国内 /轻型工业 /工业应用。测试符合BSEN 60598:一般要求和测试的规范。必须根据所有相关立法的适当合格的人安装。环境工作温度为0°C至25°C。如果超过最大工作温度,则灯具将自动调光 /关闭。终端块的额定值为16a。光源是不可更换的。带有紧急包装的照明器:当电池连接时,电池输出端子隔离时,电池输出端子可能会有效。维修前隔离电源和电池。紧急照明需要与切换供应相同阶段进行无关的实时连接。当不交往的供应连接状态指示器时,指示器会亮起绿色,当未交换的供应被断开指示器熄灭时,灯具在紧急模式下运行。进行全排放测试之前需要24小时充电期。所提供的紧急测试表应用于记录所有紧急测试。未达到3小时持续时间时应更换电池。永久实时的过度切换可能导致过早电池故障。电池电解液可能有害于眼睛 /开放的伤口,如果电解质触摸皮肤 /眼睛用水冲洗,请不要刺穿。不要焚化电池。

LFBD – 波尔多梅里尼亚克 AMDT 04/24 ...
当顺风速度达到 5 kt 时,QFU 23 是首选。 05/23 跑道已用尽侧风分量 15Kt。巡回训练和/或资格飞行:这种类型包括仪表进近程序或连续目视巡回飞行的重复训练。为了尊重环境,禁止环路飞行,除非提前 48 小时向机场负责人提出合理请求并获得特别授权。对授权航班施加的条件: - 可能的时间:周一/周五:当地时间 08:00 至 20:00;周六/周日/节假日:禁止。 - 授权飞行: • 将遵循控制机构规定的具体程序,包括在复飞期间强制应用抗噪音程序; • 将优先使用23号跑道(QFU23)。只有 A 类和 B 类飞机可以使用 29 号跑道 (QFU29)。