XiaoMi-AI文件搜索系统
World File Search Systemeasiest
释放机器人技术,机器视觉,数据和AI
技术进步通常首先征服最大,最简单的细分市场。在固定资产生产机器人的情况下,这种模式很明显,在固定资产生产机器人中,市场已经达到了巨大的规模和成熟度。农业应用程序的机器人技术是生物特征的结果要复杂得多。因此,这个市场的服务不佳。但是,它正在追赶,目前显示的年增长率为20.7%,显着高于整体工业机器人市场。直到最近,这种增长主要用于开放式农业应用。,但下一个是用于园艺应用程序的机器人技术,通常在较大的批量上落后几年(并且在许多情况下,多样化)的露天场应用程序。许多潜在的增长驱动因素正在加速机器人技术在园艺中的使用。

11. 连接不同材料
− 最简单的选择是将两种材料相互电绝缘。如果它们不电接触,就不会产生电偶。这可以通过在具有不同电势的金属之间使用非导电材料来实现。 − 可以使用防水化合物(例如油脂)或在金属上涂上不透水的保护层(例如合适的油漆、清漆或塑料)来防止与电解质接触。如果无法同时涂覆两种材料,则应将涂层应用于具有较高电极电位的材料。如果仅在活性更高的材料上涂覆涂层,则如果涂层受损,将产生较大的阴极面积,而对于暴露的非常小的阳极面积,腐蚀率将相应较高。 − 电镀或其他金属涂层也有帮助。通常使用更贵重的金属,因为它们更耐腐蚀。镀锌可通过牺牲阳极作用保护钢基体金属。

使用最佳定位的基于视觉的对象跟踪...
位置估计的准确性受能够提供相对目标测量值的传感器/信标数量的影响。虽然单个传感器/信标是最容易实现的系统,但必须进行多次测量才能确保位置信息的准确性。多个传感器/信标可以实现更及时的位置验证,但会增加系统复杂性。例如,传感器/信标的属性及其相对于目标物体的几何形状会影响系统的准确性。如果相同的传感器/信标太近,它们将提供几乎相同的信息,对知识库的补充很少。如果传感器/信标相距太远,可能会遗漏一些重要信息。因此,最佳传感器/信标间距介于这两个极端之间。本文将进一步探讨一种控制传感器/信标阵列几何形状的方法,以在实验期间保持最佳跟踪性能配置。
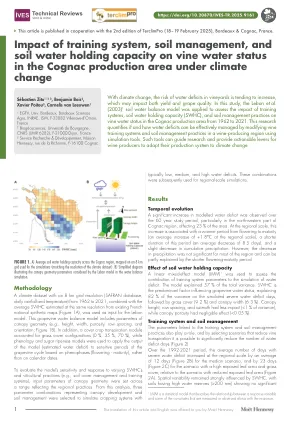
在气候变化下,训练系统,土壤管理和土壤水的能力对干邑生产区域的藤水状况
讨论,局限性和未来研究的途径该模型的准确性取决于输入数据,尤其是SWHC估计和草覆盖效果。SWHC主要取决于固有的土壤特征,例如纹理和粗元素的百分比,这超出了种植者的控制。然而,这也取决于葡萄树生根深度,生产者可以通过适当的植入土壤制备或使用剧烈的砧木来修改。草皮的百分比是所研究的草皮最简单的适应性参数。种植者可以每年甚至在一个季节内调整它,具体取决于复古的气候条件,从而对高度调节的葡萄道水缺乏作用。这种建模练习没有考虑到这种管理实践,也没有选择草覆盖物种及其干燥,所有这些都会显着影响土壤蒸发并覆盖作物蒸散量,从而弥补葡萄藤缺水的水平。

通过单个高阶模式操作通过大区域VCSEL的大量发射
实现单模式发射的最简单方法是利用一个小的氧化孔(<3μm)。但是,由于串联电阻的增加,这强烈限制了输出功率,并使热滚动局部恶化。如[6]中所述,已经提出了几种设计,以提高单模内部的产量功率,例如基于表面浮雕的圆形VCSEL [15],[16]或圆形设备,其Epi架构具有氧化物和静电波之间的特定对齐方式,通过修改几乎没有P-dbriairs [6] [6]。两种解决方案都呈现一个模式功率,左右为4÷6 mW。但是,对于使用VCSEL阵列或大型主动区域设备可以实现的功率水平仍然很低,具有多模式发射,因此较低的光谱纯度。例如,具有尺寸为40×10μm2的矩形活性区域的VCSEL报告了数十个MW的多模式功率[17],[18]。

AI 建议课程大纲语言 2024 年春季
• ● AI 是一个不断发展的工具。跟踪您如何使用 AI(例如,原始和修订的提示、您在思考过程中使用 AI 的位置、随时间推移的不同输出)。带有屏幕截图和注释的电子文件或您的流程的书面日志记录您的工作流程,并根据需要支持适当的归因和引用。• ● 对所有 AI 输出进行事实核查。AI 工具建立在具有公认偏见的系统和输入上。早期和当前的 AI 输出产生了事实错误,工具“产生幻觉”或捏造信息。如果 AI 被提示一些它几乎或完全没有信息的事情,情况尤其如此。除非您 100% 确定答案,否则请使用可信来源检查答案。• ● AI 的好坏取决于它收到的提示。使用 AI 获得符合预期和标准的结果可能需要练习和时间。因此,AI 可能不是完成任务的最佳或最简单的途径。

了解企业可再生电力采购的细微差别:聚焦时尚与科技
各公司的可再生电力声明和目标千差万别,以至于它们的含义各不相同,而其实际影响远低于它们可能暗示的范围。本报告中的所有公司都提出了某种形式的 100% 可再生电力声明或目标,但这些声明和目标的含义因其涵盖的内容、采购可再生电力所使用的工具以及匹配可再生电力的方法而有很大差异。我们发现,这些公司的可再生电力采购结构(图 S 1)非常多样化且微妙,以至于这些看似简单的声明和目标中很少有可比性的。投入大量资源追求真正高质量和有影响力的战略的公司与那些使用最简单的掩饰的公司处于同一平台上。这可能会让消费者、投资者和政策制定者无力分辨差异并激励更有意义的方法。

使用最佳定位的基于视觉的对象跟踪...
在定位和跟踪应用中,位置估计的准确性受到能够提供相对目标测量值的传感器/信标数量的影响。虽然单个传感器/信标是最容易实现的系统,但必须进行多次测量才能确保位置信息的准确性。多个传感器/信标可以实现更及时的位置验证,但会增加系统复杂性。例如,传感器/信标的属性及其相对于目标物体的几何形状会影响系统的准确性。如果相同的传感器/信标太近,它们将提供几乎相同的信息,对知识库的补充很少。如果传感器/信标相距太远,可能会遗漏一些重要信息。因此,最佳传感器/信标间距介于这两个极端之间。本文将进一步探讨一种控制传感器/信标阵列几何形状的方法,以在实验期间保持最佳跟踪性能配置。