XiaoMi-AI文件搜索系统
World File Search Systemembodied
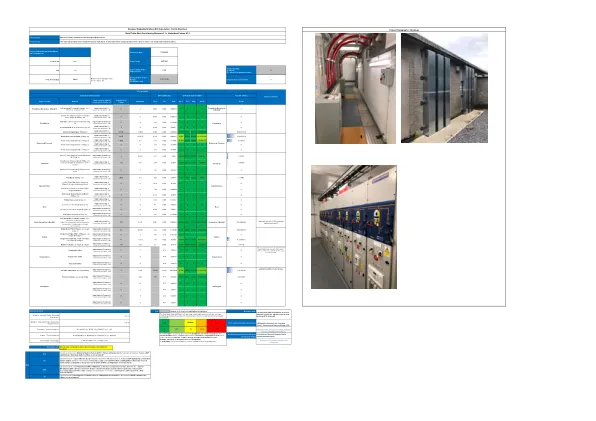
项目体现的碳故障和总计T(CO2E)
左侧的笔记表可用于帮助分解和审查计算。可以使用吨的结构木材值来计算固隔值,这用于计算整个构建生命周期中的碳存储量:20吨结构计时器x -1.64 kg(CO2E)= -32.8T(CO2E)。有关更多信息,请参见下面的选项卡上的注释A1-5。
了解现代建筑方法的具体碳凭证
本研究通过进行批判性文献综述和调查结果来评估现代建筑方法(MMC)的具体碳凭证。虽然有几项研究回顾了MMC的更广泛影响,但迄今为止,还没有其他研究全面审查了该建筑类型学的具体碳证书。由于MMC不是国际公认的术语,因此该评估包括在世界各地使用的其他术语 - 例如预制,现场建筑和工业化建筑。该研究捕获了250项单独的研究,并将其分配到最终的41项研究和总共82个案例研究比较的样本集。尽管普遍认为采用MMC会导致体现的碳储蓄,但支持这一主张的证据并不强大。各个案例研究的结果在方向和幅度上都显着范围,并且在没有批判性审查的情况下,可以得出大为不同的结论。在批评和综合已发表的研究之后,发现MMC的采用对建筑物的体现碳没有显着的正面或负面影响。

genrl:体现剂中的多模式基础世界模型
学习通才体现的代理,能够解决不同领域中的多种任务是一个长期存在的问题。强化学习(RL)很难扩大规模,因为它需要为每个任务进行复杂的奖励设计。相比之下,语言可以以更自然的方式指定任务。当前的基础视觉模型(VLMS)通常需要进行微调或其他适应性,这是由于显着的域间隙在实施情况下被采用的。但是,此类域中缺乏多模式数据代表了开发用于具体应用的基础模型的障碍。在这项工作中,我们通过介绍多模式基础世界模型来克服这些问题,能够将基础VLM的表示和对齐为RL的潜在生成世界模型的潜在空间,而无需任何语言注释。最终的代理学习框架GenRL允许人们通过视觉和/或语言提示指定任务,将其扎根在体现的域的动态中,并学习想象中的相应行为。通过机车和操纵域中的大规模多任务基准测试评估,GenRL可以通过语言和视觉提示来实现多任务概括。此外,通过引入无数据的政策学习策略,我们的方法为使用生成世界模型的基础政策学习奠定了基础。

MUEP:具有基础模型的体现计划的多模式基准
基金会模型表现出了显着的紧急能力,对构成体现的代理商的推理和计划能力持巨大希望。然而,缺乏用于评估复杂环境中具有多模式观测的体现药物的基准,仍然是一个显着的差距。在本文中,我们提出了MUEP,这是一种用于e mbodied p lanning的全面MU ltimodal基准。MUEP促进了在复杂场景中体现药物的多模式和多转弯相互作用的评估,并结合了精细粒度的评估指标,这些指标可为您在整个任务中提供有关体现剂的性能的见解。此外,我们在拟议的基准上评估了具有最新的基础模型,包括大型语言模型(LLMS)和大型多模型模型(LMMS)。实验结果表明,基于环境的文本代表的基础模型通常超过其视觉效果,这表明具有多模式观察的型号计划能力存在差距。我们还发现,控制语言的生成是不可或缺的能力,超出常识性知识,无法进行准确的体现任务完成。我们希望拟议的MUEP基准可以为体现AI的进步与基础模型的发展。

OpenEQA:基础模型时代的具体问题回答
我们提出了一种现代的体现问题答案(EQA),这是理解环境足以以自然语言回答问题的任务。代理可以通过借鉴情节记忆来实现这种理解,就像在移动机器人的情况下一样,由代理商在智能眼镜上示例或积极探索环境。我们使用OpenEQA(用于EQA的第一个开放式基准基准数据集)伴随着我们的配方。OpenEQA包含超过180个现实环境提取的1600多个高质量的人类生成的问题。除了数据集外,我们还提供了一种自动LLM驱动的评估协议,该协议与人类判断具有良好的相关性。使用此数据集和评估协议,

在交互式舞蹈音乐表演中对深层空间的体现探索
近年来,在音频生成的深度学习模型中已取得了重大进展,提供了有希望的工具用于Musical Creation。在这项工作中,我们研究了在互动舞蹈/音乐表演中使用深度音频生成模型的使用。我们采用了一种表演主导的研究设计方法,建立了研究者/音乐家与舞者之间的艺术研究合作。首先,我们描述了我们的运动互动系统 - 整合深度音频生成模型,并提出了三种用于体现深层空间的探索方法。然后,我们详细介绍建立以系统共同设计为中心的性能的创作过程。最后,我们报告了舞者访谈的反馈,并讨论结果和观点。代码实施在我们的GitHub 1上公开可用。

使用大语言模型进行体现导航的进步:调查
近年来,大型语言模型(LLM)的快速发展,例如生成的预训练的跨前者(GPT),由于它们在各种实际应用中的潜力而引起了人们的关注。LLM与体现智能的应用已成为重点的重要领域。在LLM的无数应用中,导航任务特别值得注意,因为它们要求对环境和快速,准确的决策有深刻的了解。llms可以增强具有复杂的环境感知和决策支持的体现的智能系统,利用其强大的语言和图像处理能力。本文提供了详尽的摘要,内容涉及LLMS与体现智能之间的共生,重点是导航。它回顾了最先进的模型,研究方法,并评估了现有体现导航模型和数据集的优势和缺点。最后,本文阐明了基于当前研究的LLM在具体智能中的作用,并预测了该领域的未来方向。本调查中的全面研究列表可在https://github.com/rongtao-xu/awsome-llm-en上找到。

当代小儿种群中有氧健身的参考值
摘要众多研究表明,体育活动有助于词汇整合(即“制定效应”),表明行动可以提高记忆力的性能并支持语言编码。这种现象最近被描述为“体现的学习”,或者涉及与学习内容直接相关的自我执行或自我生成的动作的学习。体现的语义认为,认知基于源自人类经验的多模式表示,并且运动过程在语言处理中起着至关重要的作用。这一证据的许多证据在于神经影像学研究表明,在发育和成人期间,无论是在词汇加工过程中招募了感觉和运动系统。对成人第二语言(L2)学习者的研究通常表明,感觉运动网络也参与L2处理,但比L1少。与L1获取相比,这可能是由于L2学习经常被脱皮的。最近,人们对促进体现学习及其对L2学习的影响的神经认知过程的兴趣越来越大。在本章中,我们回顾了由行为和神经认知研究报告的主要结果,探讨了本地语言处理和成人L2学习者中体现的语言处理和学习。1。体现的语义是找到我们如何将概念与语言标签联系起来的关键,这是我们理解我们如何获得第一语言,后来在生活中学习第二种语言的基础(另请参见Tokowicz&Tkacikova,本卷)。尽管进行了数十年的研究,但关于人脑如何将声学信号(例如[g ɪˈ tː])与特定概念(例如吉他)联系起来(Saussure,1916; Shapiro,2011年)仍然几乎没有共识。当前有两个相反的观点,这些观点与为概念信息构建的表示类型不同。根据经典的Amodal理论,认知是一个计算过程,从感知和通过操纵心理符号来创造意义(Fodor,1998; Landauer&Dumais,1997)。通过“三明治模型”隐喻描述了这一点:感觉运动系统简单地感知信息(输入),然后产生动作(输出)(Hurley,1998)。同时,将认知夹在两者之间,以便1)将感知的输入转换为Amodal符号,并将其链接到我们语义内存中的相关信息,并在我们的语义内存中链接到2)对这些符号进行操作以进行输出。本质上,知识存储在一个孤立的语义记忆系统中,独立于感觉运动过程。经典的Amodal理论并不能说明我们如何理解这些符号的现实世界含义,而这些符号本身是由其他符号定义的。挑战传统认知研究的一些基本信念,体现了理论,规定概念符号在某些时候必须与现实世界有关,并以感觉运动体验为基础(Hauk&Tschentscher,2013年)。这也可能适用于更抽象的概念,例如自由,至少在最初与个人经验相关(例如,一个孩子从请子弹中提取自己并听到“您是免费的!”)。根据体现的语义,概念表示受到感觉运动过程的影响很大,语言形式基于我们人体的感知和行动计划体系(Barsalou,1999)。其背后的关键概念之一是“相关学习原理”,根据该原则,动作感知和意义的同时存在导致神经元的共同触发,形成神经连接或分布式神经网络,以进行语义处理(Pulvermu ller,1999; 2013; 2013; 2013; 2013; 2013; 2013; 2013)。简而言之,“什么共同开火,将电线一起开火”(Hebb,1949年),例如,如果孩子经常在踢球时听到“踢”一词,那么词典语义网络,负责处理“踢”一词的词典语义网络,以及负责处理和执行运动必要的动作的人,将成为共享的网络,将会随着时间的推移而成为共享的网络。这个想法与Amodal理论形成鲜明对比,该理论声称用于概念知识和语言的表示形式独立于身体及其经验。尽管本章中描述的许多研究所描述的,但在该领域的最新研究最初是黑色和白色的,但该领域的最新研究变得更加细微,并集中在何时以及如何体现语言上。

关于儿童的体现认知的新见解...
2019年5月6日至7日,卡尔加里大学的沃尔克伦德教育学院在SSHRC Connection Grant,Calgary University副校长研究和Werklund教育学院的支持下,举行了戏剧和扫盲智囊团。Approximately 40 teachers, early childhood educators, facilitators in outdoor and indoor physical literacy and active lifestyle, and researchers gathered to listen to world-renowned scholars Bryan Kolb, PhD, Sebastian Suggate, PhD, and Magdalena Janus, PhD, speak about brain development (Kolb and Gibb 2011), the impact of play and fine motor skills on learning (Suggate, Stoeger and PUFKE 2017),以及EDI衡量的当前加拿大幼儿园准备措施(Guhn等,2016)。本文的启发来自该事件的讨论。Lorraine D Reggin是卡尔加里大学心理学系的博士生。Penny M Pexman是卡尔加里大学心理学系教授

通过形态自适应四足机器人实现现实世界的人工智能
机器人在其使用寿命期间通常受固定形态的约束,只能调整其控制策略。在这里,我们展示了第一个可以在形态上适应户外非结构化环境中不同环境条件的四足机器人。我们的解决方案植根于具身人工智能,由两个部分组成;(i)允许现场形态适应的机器人,以及(ii)基于当前感知的地形在最节能形态之间转换的适应算法。首先,我们建立一个模型来描述机器人形态如何影响选定地形上的性能。然后,我们在真实的户外地形中测试持续适应,同时允许机器人不断更新其模型。我们表明,机器人利用其训练有效地在不同的形态配置之间转换,与非自适应方法相比,性能显著提高。现实世界形态适应的已证明的好处表明,未来机器人设计中可能存在一种将适应性融入其中的新方式。