XiaoMi-AI文件搜索系统
World File Search Systemfailures
您的数据现代化途径
合作已成为一条越来越具有挑战性的途径,因为美国银行监管机构正在密切审查BAAS的安排,使Baas Non -Bank合作伙伴保持与赞助商银行类似方式的标准,并在合作伙伴的绩效不符合这些标准时对赞助商银行负责。10 This close scrutiny has resulted in various banking agency consent orders against BaaS partner banks on items including unsafe or unsound banking practices, governance and oversight, third-party risk management (TPRM), new product approval process, Bank Secrecy Act (BSA)/anti-money laundering (AML) and customer due diligence, IT control programs and IT risk management programs, and consumer protection failures (including deceptive acts和实践)如图5所述。

提高公共充电基础设施的可靠性
根据第 2061 号议会法案,加州能源委员会 (CEC) 负责为接受公共资助的电动汽车充电站制定正常运行时间记录和报告标准。5 为了响应在电动汽车充电基础设施可靠性研讨会上收集的利益相关者的反馈,加州空气资源委员会和 CEC 正在考虑两种方法来解决公共资助充电器的充电可靠性故障。6 充电器互操作性和支付系统故障将在充电器安装之前通过通信标准和设备一致性来解决。充电器和网络故障以及内部支付系统故障将通过性能标准和监控来解决。其余故障(间歇性支付系统故障和外部支付系统故障)的方法仍在制定中。7
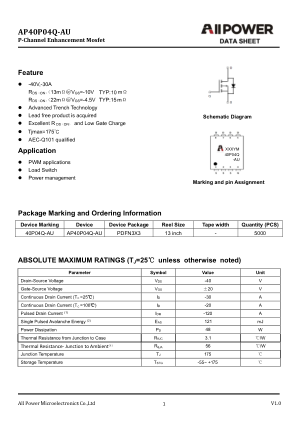
AP40P04Q-AU
The information given in this document describes the independent performance of the product,but similar performance is not guaranteed under other working conditions,and cannot be guaranteed when installed with other products or equipment.To achieve the required performance of the product in actual scenarios,the customer should conduct a complete application test to assess the functionality of the product. Allpower assumes no responsibility for equipment failures result from using products at values that exceed the ratings,operating conditions,or other parameters listed in the product specifications. The product described in this specification is not applicable for aerospace or other applications which requires high reliability.Customers using or selling these products for use in medical,life-saving,or life- sustaining applications do so at their own risk and agree to fully indemnify. Due to product or technical improvements,the information described or contained herein may be changed without prior notice.

引用本文:Cyrus K. Foroughi、Ciara Sibley、Noelle L. Brown、Ericka Rovira、Richard Pak 和 Joseph T. Coyne (2019):在模拟监督控制环境中检测自动化故障,人体工程学,DOI:10.1080/00140139.2019.1629639
摘要 本研究的目的是确定个人在监控多个自动化可靠性不同的自动显示器时的表现和视觉注意力分配情况。96 名参与者完成了一项模拟监督控制任务,其中每个自动显示器的可靠性水平不同(即 70%、85% 和 95%)。此外,参与者还完成了高和低工作量条件。性能数据显示:(1) 参与者未能检测到自动化失误的概率大约是自动化误报的 2.5 倍,(2) 参与者在高工作量条件下的自动化故障检测更差,(3) 参与者的自动化故障检测在可靠性方面基本保持不变。眼动追踪数据显示,在整个实验期间,参与者将注意力相对均匀地分布在所有三个自动显示器上。这些数据共同支持将系统范围的信任方法作为个人监控多个自动显示器的默认立场。

可靠性和安全性分析 - 普渡大学工程学院
• 已知 λ p × 10 -6 [故障/(小时 × 单位)]、现场 N [单位] 和 T [小时] • T 小时内预期故障次数 F(故障次数)= λ p × 10 -6 故障/(小时 × 单位) × N 单位 × T 小时 F = λ p × 10 -6 × N × T 故障(所有其他单位抵消) • 示例:已知现场有 1000 个单位(始终),λ p = 2 × 10 -6 ,您预计一年内会发生多少次故障? F = 2 × 10 -6 故障/(小时 × 单位) × 1000 个单位 × (365 × 24) 小时 = 17.52

利用数字营销优化物流供应链和成本控制
研究表明,供应链面临的主要挑战之一是由于各种原因(缺乏技能、疾病、运输故障、恶劣天气条件、网络攻击等)导致的故障。中断通常会导致交付失败。造成这种情况的原因通常与公司无关,并会带来严重的负面后果,特别是损失、声誉受损和客户忠诚度下降。研究表明,数字营销指标与未交付指标呈正相关。特别是社交媒体互动和交付失败(0.75),社交媒体点赞和交付失败(0.74),社交媒体互动和双周交付失败量(0.78),社交媒体点赞和双周交付失败量(0.78)。人们认为,这种情况可能是由于数字营销导致的需求增加而决定的,而公司可能并不总是为此做好准备。准备不足可能导致供应链拥堵导致中断。

凝视失败:调查人类目光以应对协作任务中的机器人失败
摘要 - 机器人很容易犯错,这可能会对他们在与人类用户的协作任务中的队友的信誉产生负面影响。从这些失败中检测和恢复对于维持用户的有效信任水平至关重要。但是,机器人可能会失败而不意识到它。检测这种失败的一种方法可能是分析人类的非语言行为和对失败的反应。这项研究调查了人类凝视动力学如何表明机器人的失败,并检查了不同类型的故障如何影响人们对机器人的看法。我们与27名参与者进行了一项用户研究,与机器人移动操纵器合作解决了Tangram难题。机器人被编程为经历两种类型的故障 - 执行和决策 - 在任务的开头或结束时发生,无论是否确认失败。我们的发现表明,机器人故障的类型和时机显着影响参与者的凝视行为和对机器人的感知。具体来说,执行故障导致了更多的目光转移并增加了对机器人的关注,而决策失败导致感兴趣领域的凝视过渡的熵较低,尤其是在任务结束时发生故障时。这些结果表明,凝视可以作为机器人故障及其类型的可靠指标,也可以用于预测适当的恢复动作。索引术语 - 动物失败,凝视动态,人机协作

螺栓故障位置分析,实现预测性维护
在本研究中,我们从汽车和轮胎厂收集了大量断裂接头螺栓,并对每个螺栓进行分析,以确定失效原因和螺栓上裂纹的起始位置。然后根据失效原因和位置对螺栓进行分组,以调查失效概率和失效位置概率。结果表明,低周和高周疲劳占螺栓失效的 70%,80% 的螺栓失效发生在螺栓螺纹区域的深处。只有在确定因低周疲劳而失效的样本中才会发现更靠近头部和杆部交叉处的失效位置。尽管如此,只有 40% 的低周疲劳导致的螺栓失效发生在靠近头部的位置,60% 的失效发生在远离头部的螺纹区域。本研究结果有助于预测螺栓的故障位置,从而有助于指导接头螺栓的预防性维护程序。
发现MK-8527,一种长效HIV HIV核苷逆转录酶易位抑制剂
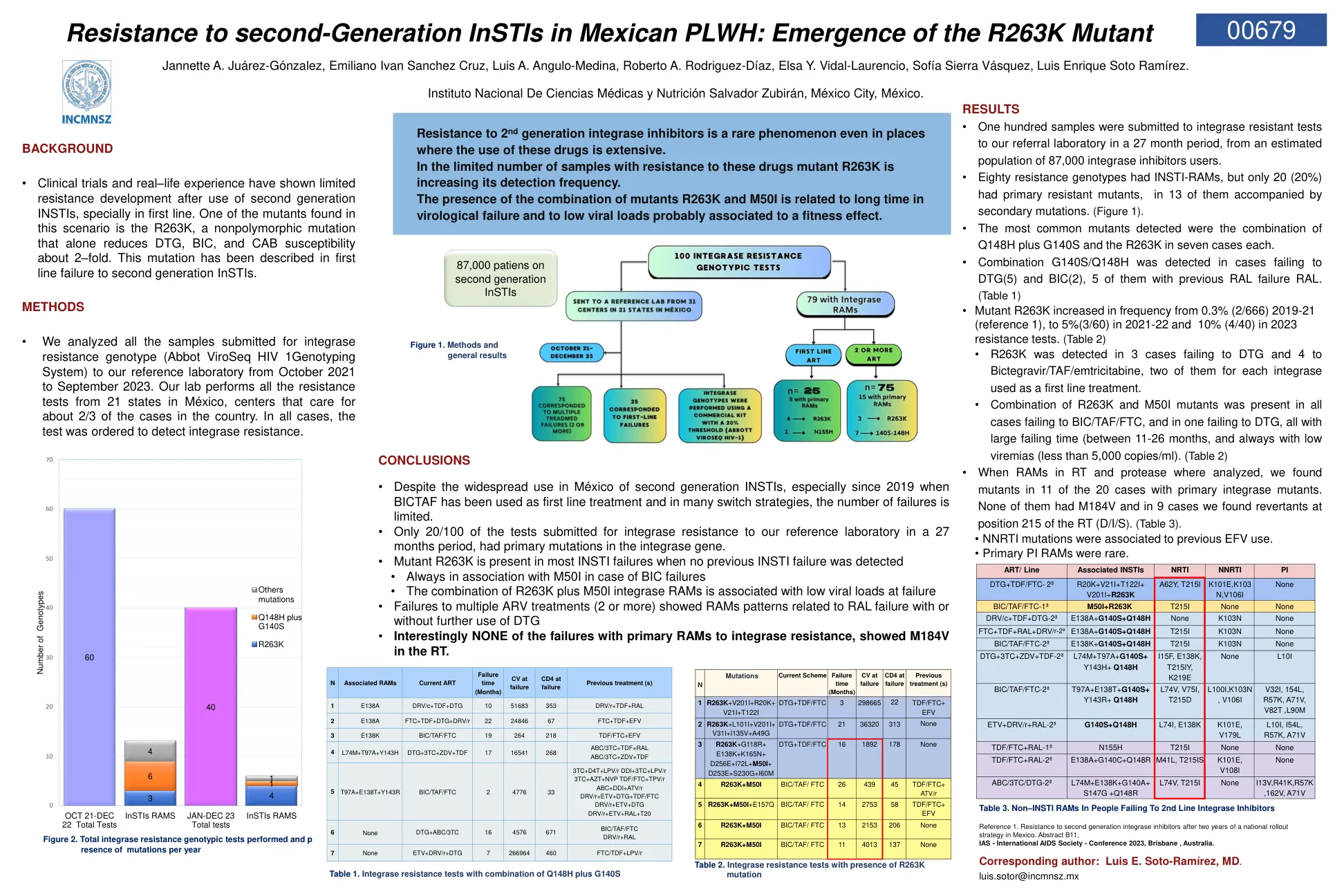
•尽管墨西哥第二代Intis的广泛使用,尤其是自2019年Bictaf被用作第一线治疗,而在许多开关策略中,失败的数量受到限制。•仅在27个月内提交了对我们参考实验室的集成酶耐药性的20/100的20/100,在整合酶基因中具有主要突变。•在大多数Insti失败中都存在突变体R263K,当未检测到以前的Insti失败•始终与M50I相关的BIC失败时始终与M50I相关联,在BIC失败的情况下•R263K加上M50L集成酶RAMS的组合与失败处于失败时的病毒量低有关•与多次ARV治疗(2或更多)与RAM的失败无关或与RAM相关的失败•DT与RAM的失败无关。集成酶电阻在RT中显示M184V。
量化人为错误
首先是唯一的。然而,当检查大量案例时,此类事故的某些一般特征就会显现出来。图 3 旨在以简化的方式表明如何表示这种通用模型。通用模型称为 MACHINE(使用分层影响网络的事故因果模型)。所有事故的直接原因是人为错误、硬件故障和外部事件的组合。图 3 对这些进行了更详细的分解。主动、潜在和恢复错误已经讨论过。在硬件故障的情况下,这些可以分为两类。随机故障是可靠性模型考虑的正常故障,例如由于预期的磨损过程。从测试和其他来源可以获得有关此类故障分布的大量数据。人为故障包括两个子类别,一类是由于组装、测试和维护等领域的人为行为造成的,另一类是由于固有的设计错误造成的,这些错误会导致不可预测的故障模式或缩短生命周期。所有可靠性工程师都知道,从现场数据得出的大多数组件故障率实际上包括人为故障的影响。从这个意义上讲,这些数据不是组件的固有属性,而是取决于人为影响(管理、