XiaoMi-AI文件搜索系统
World File Search Systemfini

基于论点的自然语言解释和评估医疗保健
采矿论点是一个自动自然语言处理(TALN)和计算机论证模型的全面扩展领域,旨在在自然语言中自动识别文本资源中的论证结构(即组成部分和关系)。在媒体领域,通过提供自动检测论点结构以根据证据支持医学的方法,被证明是有益的。这些方法的重要性是基于以下事实:尽管神经模型在医学诊断预测中的准确性,但其结果的解释仍然有问题。本文解决了这个开放的问题,并着重于对自然语言中的论证解释的生成和评估,以帮助医学诊断预测,以帮助临床医生进行决策和教育。首先,我提出了一条新的完整管道,以根据医学本体论和从检查文本中检测到的医学本体论和临床实体进行自然考试(MCQ)医学的永久解释(MCQ)医学。我定义了对医疗指定实体(NERC)的认可和分类的艺术状态,以检测患者表达的症状以及我根据ONTTO-LOGIE的条款对医疗措施进行的,以证明提供给医学生提供的临床病例的诊断。关键字:自动自然语言处理,提取论证结构,解释性论点。管道称为SYMEXP,允许我们的系统基于模板以自然语言生成安排解释,以证明正确的答案是正确的,以及为什么提出的其他选项不正确。其次,我提出了一个框架,用于评估基于论证的解释,称为Abexa,以自动提取医学MCQ的论证结构,并突出显示一组可自定义的标准,以表征临床解释和文档的论点。abexa通过在自动论证图上定义一组模式来解决从论点的角度评估解释的问题。非常彻底,我为解毒剂软件的持续设计和开发做出了贡献,该软件提供了不同的解释性人工智能模块,这些模块由医学争论。我们的系统提供了以下功能:用于医学领域的多语言论证分析,临床诊断的解释,提取和生成,医学领域的多语言语言模型以及医学MCQ的第一个多语言基准。总而言之,在本文中,我探讨了人工智能与论证理论结合如何导致更透明的健康和卫生系统。,我们通过在医学支持方面展示其所有潜力,例如医学生,将结果应用于关键的医学领域。
有关处理个人数据的信息...
关于根据 (EU) 2016/679(“GDPR”)处理针对 ALLIANZ VALUE 福利服务受益人的个人数据的信息 1. 数据控制者 1.1 ALLIANZ VALUE SRL,注册办事处位于米兰 Piazza Tre Torri 3。 2. 与处理目的有关的个人数据和信息类型 2.1.数据控制者会获取您的个人数据,包括普通个人数据和特殊个人数据(在某些情况下,这些数据可能与您的家庭成员有关): - 在门户网站注册阶段直接获取,用于管理与您的福利计划相关的服务(以下简称“服务”), - 间接获取,通过您作为雇员/合作者或类似人员的公司获取,用于管理上述服务,履行您与公司本身的雇佣关系。 2.2.数据控制者处理个人数据以实现以下目的: - 提供服务; - 履行因提供服务而产生的任何行政和税务义务; - 在适当识别服务受益人后,在“客户服务”和“后台”领域提供帮助; - 发送机构通讯和服务信息; - 发送包含与可用服务相关的信息; - 发送通讯以收集接受服务的相关方的满意度水平; - 履行意大利法律、条款、法规、社区立法或管理局命令所规定的义务; - 行使数据控制者的权利,例如法庭辩护权。您或其他方提供的数据,包括与您使用 Allianz My Welfare 门户和购买其中包含的福利服务相关的数据,尤其由 Allianz Value、Allianz SpA 及其代理网络、Allianz SE 集团的公司和第三方使用,并将这些数据传达给这些公司,以便这些公司(也代表 Allianz SE 集团的其他公司)开展与门户管理和福利服务提供相关的管理、会计和一般合同活动。明确指出,出于这些目的,提供数据是强制性的,否则数据控制者可能会发现自己客观上无法提供服务或履行法律或合同义务。 2.3. Allianz Value 使用个人数据进行市场研究和/或促销目的。如果您同意,您的非敏感个人信息将用于传达 Allianz Value 和 Allianz Group 公司的产品和/或服务的新闻和促销机会(由 Allianz Value Srl、Allianz SpA 及其代理网络和/或安联集团的其他公司(您的数据将会被传送给这些公司)。在您明确同意的基础上,安联价值可能会处理个人数据,以便通过电子邮件、邮寄和/或短信和/或电话与您联系,并向您提供有关特别促销和新产品和/或服务的商业信息,或者在您明确同意的情况下。我们要求您仔细阅读同意请求,并说明您的同意完全是可选的,您的拒绝不会对您请求的产品或服务的提供产生任何影响。此促销商业同意可自由撤销,并且自收到撤销之日起三天后处理的合法性即终止;此同意将持续有效,直至撤销。 2.4.关于可能通过您获取您家庭成员的某些个人数据,我们明确规定,您有责任向他们提供这些信息,并在将此类信息输入门户网站之前征得他们的事先同意,但明确规定,如果不遵循此类预防措施和/或输入的某些信息不正确,您仍承担全部责任。 3. 数据处理方法 3.1 个人数据的处理以合法、正确和透明的方式进行,仅用于提供服务,也通过与为此目的指定的第三方沟通,并使用以下方法:收集、仅用于提供服务,包括通过与为此目的指定的第三方沟通,并使用以下方法:收集、仅用于提供服务,包括通过与为此目的指定的第三方沟通,并使用以下方法:收集、

单位评估报告-MP3CV
单位表征 - 名称:病理生理的机制和心脏 - 血管钙化的后果 - 首字母缩写:MP3CV-标签和数字:UPJV 7517-管理团队组成:PRSAïdKamelPanel Panel Scopicific of Cardioccular Carciational Carciational carciationication,sve6主题单位,生理病理学,临床后果和治疗剂,重点是慢性肾功能不全(IRC),并钙化主动脉狭窄。该单元还针对IRC的并发症和与IRC的药物治疗相关的海关症。单元的历史和地理位置单位最初是由两个EA具有互补专业知识(心血管病理生理学和骨骼病理生理学)的融合而创建的。在2012年,实验室演变为混合插入单元(UMRS 1088)。Inserm标签在前任董事Ziad Massy教授离开后,并未续签。该部门位于爱语大学医院的卫生大学研究中心。UR 7517 MP3CV单元的研究环境属于UPJV卫生部门,其实验研究实验室位于靠近Amiens-Picardie Chu的卫生研究中心(Curches)。这些轴也基于多种护理服务的临床研究活动。研究活动受益于三个平台:蜂窝工程平台和蛋白质分析(ICAP)以及两个用于临床前研究的平台。研究活动是大学和CHU共同定义的轴的一部分:手术创新轴和组织重塑,还汇集了UPJV Chimere单位的活性 - 头孢杆手术以及结束 - 形态和功能,功能和SSPC表征 - 复杂患者的护理简化。对于MP3CV,对于心脏病学,肾脏病,心血管和胸腔手术,心血管复苏以及强化医学以及复苏。从2019年开始,在UPJV和沿海科学大学(ULCO)和Artois大学(UA)之间建立了一个协会(A2U)。为了团结3个机构的研究力量并提高其知名度,已经制定了常见的科学策略。对于A2U协会的卫生部门,定义了一个共同的签名,以更好地将这项研究定位在法国哈特地区。mp3CV研究活动在此签名中完美地编写。这种动态导致该部门与国家和法国地区的服务一起提交,这是CPER 2021-2027框架内的一个共同项目A2U健康。该单位在此CPER的框架内受益,收购了一项小型动物超声波和两项项目资金,以应对CPER MOSOPS的响应。在评估期之前,该单元参加了FHU狂欢节,并在RHU停留时间(搜索治疗和改善主动脉狭窄的患者的预后)RHU Stop-AS项目是一个针对瓣膜主动脉狭窄的项目,该单元参与了WP2和3,旨在研究瓣膜钙化涉及的细胞机制,并确定主动脉狭窄的新生物标志物和钙化主动脉狭窄的新治疗策略。该项目(2018-2023)使该单元能够从RHU网络创建的研究动态中受益,但也从财务捐赠中受益(MP3CV的430 K€,心脏病学服务的660 K€)。在临床研究方面,与IT相关的单位和临床服务受益于阿米恩斯大学医院临床研究与创新(DRCI)的支持。单位活动也是一个网络的一部分,将爱好,鲁昂,里尔和凯恩(G4 Group)的宗旨汇集在一起,旨在巩固4个CHU研究的国家和国际定位。
订阅 Sky 数字地面电视服务的一般条款和条件
第 1 条 - 定义 就本协议而言,所示术语应具有以下含义。以单数定义的术语也应理解为复数,反之亦然。 “订户”:签署订阅请求和本一般订阅条件的人,向其提供服务或根据以下艺术规定表明其身份的人。 12、向其提供服务的第三方; “预付款”:订户签署订阅请求时支付的金额,作为预付订阅费; “覆盖区域”:服务传输的区域,如本条款中更详细地规定。 2.2; “服务激活”:激活数字地面网络上可用的 Sky 订阅; “CAM 已启用”:条件接收模块已获得在订户拥有的数字地面网络上使用付费电视服务的认证,在服务激活之前,订户可以通过插入兼容数字电视的智能卡来使用服务; “订阅费”:订户为享受服务而应支付的金额; “一般订阅条件”:这些条件规定了订阅者和天空之间的关系; “合同”: 订阅请求和一般条件的集合; “激活费”:订户签署订阅请求时应支付的激活服务的一次性费用; “通话费”:订户通过 Sky 呼叫中心开立服务订单所欠的费用; “已启用解码器”:订户拥有的能够通过使用智能卡使用服务的解码设备; “降级”:订户提出的按照条款中指示的方式和方法减少套餐数量的请求。本一般条款 6.1; “启用材料”:订户拥有的材料,一旦插入智能卡,即可使用服务。为使用该服务而启用的材料是:启用的解码器和/或启用的CAM和/或智能CAM。可以在 sky.it/bar 网站上或通过联系 Sky 客户服务找到启用材料的特性及其示例列表; “套餐”:由 Sky 发行或已取得相关许可权利的一组付费频道。您可以在与该优惠相关的材料中以及网站 www.sky.it/business/bar 上查阅这些频道的更新列表; “公共场所”:向公众开放,提供慰安物品和/或其他服务的场所,例如:酒吧、酒馆、餐厅、比萨店、体育俱乐部、游戏室、销售点、协会、住宅、酒店、宾馆、军营、学校、大学、医院、诊所、教区和监狱的公共区域; “订阅请求”:订阅者签署的提议,请求提供服务,明确接受一般订阅条件; “服务”:订阅者在订阅请求中或根据第 14 条规定进行的后续修改中选择的 Sky 提供的一组套餐和可选产品(包括但不限于“查找天空酒吧服务”)。 6; “天空客户服务”:通过拨打专用电话号码为用户提供的客户支持服务; “查找天空酒吧服务”:向作为公共机构提供舒适食品的商业订户提供的服务,包括将其插入 Sky.it 网站的互联网搜索引擎中; “Sky”:Sky Italia Srl,注册办事处位于米兰,Via Monte Penice 720138。Sky Italia Srl 拥有唯一股东,受康卡斯特公司的管理和协调活动管辖。 “Smart CAM”:订户拥有的配备无线技术的条件接收模块; “智能卡”:授予订户使用的微芯片卡,一旦插入启用材料,即可解密服务的无线电和电视信号; “兼容数字电视”:配备与服务兼容的集成数字地面接收器的电视,其制造商已获得使用数字技术在地面网络上接收付费电视节目所需的认证; “领土”:意大利共和国、圣马力诺共和国和梵蒂冈城的领土; “第三方用户”: 可以指明订户为使用服务的人; “机票”:对服务订阅的任何附加服务,在 Sky 优惠中可用时,受本一般条款的相同条款和条件的约束,但合同期限和续签除外。门票有效期是预先确定的,并且不可续订; “升级”:增加套餐和/或可选产品,并按照条款中指明的形式和方法增加订阅费。本一般条款6.1。明确接受一般订阅条件; “服务”:订阅者在订阅请求中或根据第 14 条规定进行的后续修改中选择的 Sky 提供的一组套餐和可选产品(包括但不限于“查找天空酒吧服务”)。 6; “天空客户服务”:通过拨打专用电话号码为用户提供的客户支持服务; “查找天空酒吧服务”:向作为公共机构提供舒适食品的商业订户提供的服务,包括将其插入 Sky.it 网站的互联网搜索引擎中; “Sky”:Sky Italia Srl,注册办事处位于米兰,Via Monte Penice 720138。Sky Italia Srl 拥有唯一股东,受康卡斯特公司的管理和协调活动管辖。 “Smart CAM”:订户拥有的配备无线技术的条件接收模块; “智能卡”:授予订户使用的微芯片卡,一旦插入启用材料,即可解密服务的无线电和电视信号; “兼容数字电视”:配备与服务兼容的集成数字地面接收器的电视,其制造商已获得使用数字技术在地面网络上接收付费电视节目所需的认证; “领土”:意大利共和国、圣马力诺共和国和梵蒂冈城的领土; “第三方用户”: 可以指明订户为使用服务的人; “机票”:对服务订阅的任何附加服务,在 Sky 优惠中可用时,受本一般条款的相同条款和条件的约束,但合同期限和续签除外。门票有效期是预先确定的,并且不可续订; “升级”:增加套餐和/或可选产品,并按照条款中指明的形式和方法增加订阅费。本一般条款6.1。明确接受一般订阅条件; “服务”:订阅者在订阅请求中或根据第 14 条规定进行的后续修改中选择的 Sky 提供的一组套餐和可选产品(包括但不限于“查找天空酒吧服务”)。 6; “天空客户服务”:通过拨打专用电话号码为用户提供的客户支持服务; “查找天空酒吧服务”:向作为公共机构提供舒适食品的商业订户提供的服务,包括将其插入 Sky.it 网站的互联网搜索引擎中; “Sky”:Sky Italia Srl,注册办事处位于米兰,Via Monte Penice 720138。Sky Italia Srl 拥有唯一股东,受康卡斯特公司的管理和协调活动管辖。 “Smart CAM”:订户拥有的配备无线技术的条件接收模块; “智能卡”:授予订户使用的微芯片卡,一旦插入启用材料,即可解密服务的无线电和电视信号; “兼容数字电视”:配备与服务兼容的集成数字地面接收器的电视,其制造商已获得使用数字技术在地面网络上接收付费电视节目所需的认证; “领土”:意大利共和国、圣马力诺共和国和梵蒂冈城的领土; “第三方用户”: 可以指明订户为使用服务的人; “机票”:对服务订阅的任何附加服务,在 Sky 优惠中可用时,受本一般条款的相同条款和条件的约束,但合同期限和续签除外。门票有效期是预先确定的,并且不可续订; “升级”:增加套餐和/或可选产品,并按照条款中指明的形式和方法增加订阅费。本一般条款6.1。Via Monte Penice 720138。Sky Italia Srl 拥有唯一股东,受康卡斯特公司的管理和协调活动管辖。; “Smart CAM”:订户拥有的配备无线技术的条件接收模块; “智能卡”:授予订户使用的微芯片卡,一旦插入启用材料,即可解密服务的无线电和电视信号; “兼容数字电视”:配备与服务兼容的集成数字地面接收器的电视,其制造商已获得使用数字技术在地面网络上接收付费电视节目所需的认证; “领土”:意大利共和国、圣马力诺共和国和梵蒂冈城的领土; “第三方用户”: 可以指明订户为使用服务的人; “机票”:对服务订阅的任何附加服务,在 Sky 优惠中可用时,受本一般条款的相同条款和条件的约束,但合同期限和续签除外。门票有效期是预先确定的,并且不可续订; “升级”:增加套餐和/或可选产品,并按照条款中指明的形式和方法增加订阅费。本一般条款6.1。Via Monte Penice 720138。Sky Italia Srl 拥有唯一股东,受康卡斯特公司的管理和协调活动管辖。; “Smart CAM”:订户拥有的配备无线技术的条件接收模块; “智能卡”:授予订户使用的微芯片卡,一旦插入启用材料,即可解密服务的无线电和电视信号; “兼容数字电视”:配备与服务兼容的集成数字地面接收器的电视,其制造商已获得使用数字技术在地面网络上接收付费电视节目所需的认证; “领土”:意大利共和国、圣马力诺共和国和梵蒂冈城的领土; “第三方用户”: 可以指明订户为使用服务的人; “机票”:对服务订阅的任何附加服务,在 Sky 优惠中可用时,受本一般条款的相同条款和条件的约束,但合同期限和续签除外。门票有效期是预先确定的,并且不可续订; “升级”:增加套餐和/或可选产品,并按照条款中指明的形式和方法增加订阅费。本一般条款6.1。
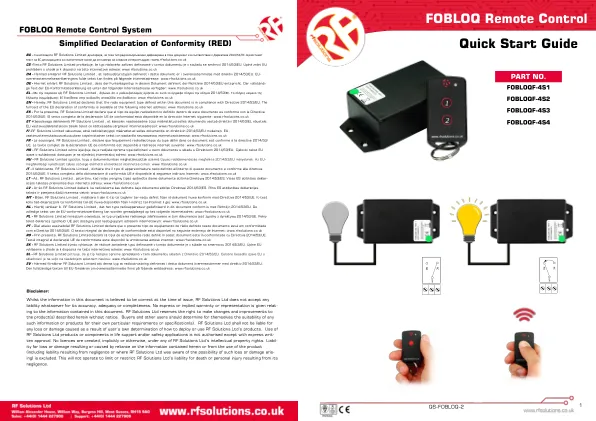
fobloq遥控器快速启动指南
bg-带有真正的RF解决方案有限的声明,即tosi型无线电 - 在浪潮文档E中的定义词,以制定2014/53/eu的指令。欧盟声明的裁定裁决的ceolostrent技术在堆积的阶段,请勿在:www.rfsolutions.co.uk cs -tímtorf Solutions limitedprohlašuje,Žeprohlašuje中Rnicí2014/53/eu。úPlné zn ě ní eu prohlášení o Shhod ě je k dispozici na této internetové adorese: www.rfsolutions.co.uk da - Hermed Erklærer Rf Solutions Limited, AT Radioudstyrstypen Defineret I Dette Dokumb Er I OvernsteMelse Med Direktiv 2014/53/EU.eu -ofernstemelsserklæringensfulde tecst kan找到pålgendeInternet:www.rfsolutions.co.uk de -HiermiterklärtRfSolutions rf Solutions Limited,Dass der der funkanlagentyp in Diesem diesem diesem diesem diesem diesem diesem diesem dokumb decumb derrict derrictlinie derrictlinie 2014/53/e entest。devvollständi-g文本der eu-konformitätserklärungist inter der forgenden internetverfügbar:www.rfsolutions.co.uk.uk co.ukτηνπαρούσασαο αυτότοτοτοπληροίτην≥ηmb2014/εεε。τοπλήρεςwww.rfsolutions.co.uk en-此处,RF Solutions Limited声明无线电设备类型文档符合指令2014/53/eu。欧盟合格声明的全文可在以下Internet地址提供:www.rfsolutions.co.co.co.co.co.co.co.co.co.co.co。 Limited decto eque el tipo de Equiporadioeléctricodeconido dentro dentro es conforme con Directiva 2014/53/ue。您可以找到相同的sámi声明。以下文件负责2014/53/EL指令。EL答案声明的文本包含Internet地址:www.rfslutions.co.co。指令2014/53/eu。EU -Student真空疫苗可在Internet上获得:www.rfsolution.co.uk fr -letéfiniDéfiniDéfinidéfinice文档est constormeconformeà已成为指令2014/53/ ue。该国已使用了立法者:www.rfsoluction.co.co。 Directivom 2014/53/EU。cjeloviti文本欧盟孤立的soul-out dostupa 2014/53/eu灌溉量。az eu megfeelleőnygi nygi nucleus documento docutsoo vondodo s构象符合2014/53/ue。你将能够il testo完整deeller deharazoneconstrimàuedeponibileal segente intecoco互联网:www.rfsolution.co.uk lt -aš,rf Solutions limited limited limitedųcthr Charttuu,Cad Rudjoys,CAD Rudjoys等级ų提示提示Appble RaddJoguu uddjogu uddjoguousta attaiam attaim undictectecte theiam undifeą Visas es teces suclar-ochast techstasspramainamasšeo'thatruiltdirect基2014/53/es。 pilse es pilse at piLuilt t-radju确定的f'da id记录的hwaformity mad-dirtiva 2014/53/ue。 IT测试柱TAD-DEJASJONI是绑定的诱导的Al-ue HWHA dispony f'dan l-Indecids tal-Unternate li radiophoraper gdefinite gdefinite in Dit文档可能是Richtligon 2014/53/eu。 de vollidige文本van de eu -conformititesVercling可以wa goden gerardplegd up volgende InternatedRes:www.rfsoluctions.co.uk pl -rf Solutions limited nesseem o -radiowegogo -radiowego zdefinioaade zdefinioaade w Time Docudment w Time Docudment w Time comected GESL ZGODNY ZGODNY ZGODNY ZERIER Z DIRETINE płny文本declaracjizgodnośuegest gest dust d pny pod nast nasting tipping de de derádioderádiodecordo nested docutsodoeSáEsáEsáEmbodformadade com of Director 2014/53/ue。Visas es teces suclar-ochast techstasspramainamasšeo'thatruiltdirect基2014/53/es。 pilse es pilse at piLuilt t-radju确定的f'da id记录的hwaformity mad-dirtiva 2014/53/ue。 IT测试柱TAD-DEJASJONI是绑定的诱导的Al-ue HWHA dispony f'dan l-Indecids tal-Unternate li radiophoraper gdefinite gdefinite in Dit文档可能是Richtligon 2014/53/eu。 de vollidige文本van de eu -conformititesVercling可以wa goden gerardplegd up volgende InternatedRes:www.rfsoluctions.co.uk pl -rf Solutions limited nesseem o -radiowegogo -radiowego zdefinioaade zdefinioaade w Time Docudment w Time Docudment w Time comected GESL ZGODNY ZGODNY ZGODNY ZERIER Z DIRETINE płny文本declaracjizgodnośuegest gest dust d pny pod nast nasting tipping de de derádioderádiodecordo nested docutsodoeSáEsáEsáEmbodformadade com of Director 2014/53/ue。pilse es pilse at piLuilt t-radju确定的f'da id记录的hwaformity mad-dirtiva 2014/53/ue。 IT测试柱TAD-DEJASJONI是绑定的诱导的Al-ue HWHA dispony f'dan l-Indecids tal-Unternate li radiophoraper gdefinite gdefinite in Dit文档可能是Richtligon 2014/53/eu。 de vollidige文本van de eu -conformititesVercling可以wa goden gerardplegd up volgende InternatedRes:www.rfsoluctions.co.uk pl -rf Solutions limited nesseem o -radiowegogo -radiowego zdefinioaade zdefinioaade w Time Docudment w Time Docudment w Time comected GESL ZGODNY ZGODNY ZGODNY ZERIER Z DIRETINE płny文本declaracjizgodnośuegest gest dust d pny pod nast nasting tipping de de derádioderádiodecordo nested docutsodoeSáEsáEsáEmbodformadade com of Director 2014/53/ue。IT测试柱TAD-DEJASJONI是绑定的诱导的Al-ue HWHA dispony f'dan l-Indecids tal-Unternate li radiophoraper gdefinite gdefinite in Dit文档可能是Richtligon 2014/53/eu。 de vollidige文本van de eu -conformititesVercling可以wa goden gerardplegd up volgende InternatedRes:www.rfsoluctions.co.uk pl -rf Solutions limited nesseem o -radiowegogo -radiowego zdefinioaade zdefinioaade w Time Docudment w Time Docudment w Time comected GESL ZGODNY ZGODNY ZGODNY ZERIER Z DIRETINE płny文本declaracjizgodnośuegest gest dust d pny pod nast nasting tipping de de derádioderádiodecordo nested docutsodoeSáEsáEsáEmbodformadade com of Director 2014/53/ue。de vollidige文本van de eu -conformititesVercling可以wa goden gerardplegd up volgende InternatedRes:www.rfsoluctions.co.uk pl -rf Solutions limited nesseem o -radiowegogo -radiowego zdefinioaade zdefinioaade w Time Docudment w Time Docudment w Time comected GESL ZGODNY ZGODNY ZGODNY ZERIER Z DIRETINE płny文本declaracjizgodnośuegest gest dust d pny pod nast nasting tipping de de derádioderádiodecordo nested docutsodoeSáEsáEsáEmbodformadade com of Director 2014/53/ue。płny文本declaracjizgodnośuegest gest dust d pny pod nast nasting tipping de de derádioderádiodecordo nested docutsodoeSáEsáEsáEmbodformadade com of Director 2014/53/ue。关于文本的整体dadeclaraçãodeconformidadeestáno seguinteendoreçoDeInternet:www.rfsolucations.co.uk ro- Prinu Presen,RF Solutions Limited Declar limitedeclaráCe ecehipemente Radio decoriata decordita decoriata firediona iCest decordiTa -acest decordiata -acest acest acest acest cuinivivation cuivivation cuivivation cuivivation cuivivation 2014/53/ue。textul积分al declara la urm toarea地址:www.rfsolútion.co.uksk -rf Solutions Limited在此宣布本文档中定义的无线电设备符合指令2014/53/EU。完整的欧盟合格声明可在此Internet地址提供:www.rfsoluctions.co.uk sl -RF Solutions Limited扩展,DA TIP RADIAN OPREME OPREMEPREMEJENO在Direktiva 2014/53/eu的文档库存中。整个-Time Izjava eu关于存储是沃尔乔的存储,www.rfsolucations.co.uk sv -härmedFörsäkrarrf rf解决方案有限公司att类型av radoutrustning a av radOusting i detta dottadocutstämmerdicutstämmermed direktiv 2014/53/eu。