XiaoMi-AI文件搜索系统
World File Search Systemflap

flap核酸内切酶1通过ADP-核糖基化Yilun Sun 1*,Lisa M. Jenkins 2,Lara H. El Touny 3,Ukhyun Jo 1,Xi Yan
抽象的DNA-蛋白交联(DPC)是最普遍和有害的DNA病变之一,是由于暴露于代谢应激,药物或交联药物(如甲醛(FA))而引起的。fa是甲醇代谢,组蛋白脱甲基化,脂质过氧化和环境污染物的细胞副产品。无法修复FA诱导的DPC几乎所有基于染色质的过程,包括复制和转录,导致免疫缺陷,神经变性和癌症。然而,它在很大程度上仍然未知细胞如何维修DPC。由于缺乏鉴定DPC的技术,我们不理解FA的蛋白质类型会阻碍DPC修复的研究。在这里,我们通过将氯化葡萄球菌差异超速离心与HPLC-MAS-MAS光谱法(MS)耦合,从而设计了一种新型的生物测定法,以介绍FA诱导的DPC。使用该方法,我们揭示了FA诱导的人类细胞中FA诱导的DPC的蛋白质组,发现形成DPC的最丰富的蛋白质是PARP1,拓扑异构酶I和II和II和II,甲基转移酶,DNA和RNA聚合酶,组蛋白,组蛋白,以及核糖体蛋白。为了鉴定修复DPC的酶,我们进行了RNA干扰筛选,发现皮瓣核酸内切酶1(FEN1)的下调使细胞对FA过敏。由于Fen1具有5'-FLAP内切酶活性,因此我们假设FA诱导了DPC偶联的5'-FLAP DNA片段,可以通过Fen1处理。的确,我们证明了FA会损坏通过碱基切除途径(BER)转化为5'-FLAP的DNA碱基。我们还观察到受损的DNA碱基与DPC和FEN1共定位。从机械上讲,我们显示了FEN1在体内修复FA诱导的DPC和裂解5'-FLAP DNA底物,这些DNA具有模拟于体外的DPC。我们还发现,FEN1修复酶拓扑异构酶II(TOP2)-DPC,由其抑制剂依托泊苷和阿霉素诱导的诱导的酶促蛋白酶和阿霉素独立于BER途径,而FEN1和FEN1和DPC靶向的蛋白酶sprtn是对两种FA诱导的非Zym Zym Zym Zymations sprapterations spr的可行途径top2-dpcs。值得注意的是,我们发现FA诱导的非酶DPC和酶ToP2-DPC迅速通过聚辅助核糖基化(ParyLation)迅速修饰,这是一种由PARP1催化的翻译后修饰,由PARP1催化的,这是一种由Paryling DNA损伤损害蛋白和DNA Reparion Reparte resation and DNA损伤蛋白的关键DNA损伤效应器和DNA Reparte resation and dna Reparte stotes和DNA Reparte stotes。,我们用HPLC-MS的抗PAR抗体进行了免疫沉淀(IP)测定,并将Fen1鉴定为parylation底物。接下来,我们表明DPC底物的填充信号发出了Fen1,而Fen1的抚养也将Fen1驱动到DPC位点。最后,使用末端ADP-ribose-MS方法的酶促标记,我们将FEN1的E285残基确定为主要的荷置位点,这似乎是FEN1迁移到DPCS所需的。综上所述,我们的工作不仅揭示了FA诱导的DPC的身份,而且还发现了前所未有的PARP1-FEN1核酸酶途径,是一种通用和势在必行的机制,可以修复其他DPC并防止DPC诱导的基因组不稳定。

引导编辑系统研究进展
flap 之间存在动态转换,使所需 DNA 信息有机会 与基因组的靶标链结合,之后 5' flap 会在细胞修复 的过程中被切除,经过 DNA 修复过程,最终实现基 因组信息的修改 ( 图 1 ) 。在这个过程中,融合蛋白 承担了切割目标位点非靶标链和逆转录的双重功 能,而 pegRNA 既引导 PE 识别目标位点,又包含了编辑 所需的信息。通过这 2 个组分, PE 系统实现了识 别、切割、起始逆转录的引物序列结合、逆转录等一 系列过程,并将所需 DNA 信息直接逆转录至目标 位点的断裂处 [ 26 ] 。 PE 系统的设计非常简单精巧,无 需引入 DNA 模板,也不产生双链断裂,是一种非常

结构疲劳寿命评估和维持...
本文概述了美国海岸警卫队的疲劳寿命评估项目 (FLAP) 及其结果在国家安全巡逻艇级船体结构生命周期管理中的应用。FLAP 仪器的关键测量之一包括基于雷达的波浪数据测量系统。这些测量用于确定巡逻艇在服役前五年遇到的运行概况和波浪统计数据。将此信息与设计假设进行比较,以了解设计、实际操作和对长期疲劳损伤预测的影响之间的差异。讨论了操作员的影响。模型测试、专门试验和长期监测为分析和预测的局限性提供了宝贵的见解。讨论了基于可靠性的疲劳寿命预测方法,以及如何使用它们来评估疲劳生命周期管理的选项以及在设计早期考虑疲劳的投资回报率 (ROI)。最后,本文给出了结论和建议,以推进光谱疲劳方法,从而以经济的方式管理船舶结构疲劳。
牙科计划设计和收益摘要
• Occlusal adjustment, (other than with an appliance or by restoration) • Root planing and scaling, 1 to 3 teeth per quadrant, (1 per site every 2 policy years) • Root planing and scaling, 4 or more teeth per quadrant, (4 separate quadrants every 2 policy years) • Surgical revision procedure, per tooth • Gingivectomy/gingivoplasty, 1 to 3 teeth per quadrant, (1 per站点每2个政策年)•牙龈切除术/牙龈成形术,每象限4牙齿(每3个象限1个),每3个政策年)•牙龈皮瓣程序,每象限1至3个牙齿(每3个象限1个)(每3个政策年度1个政策年)•每象牙齿的牙齿牙齿4或更多的牙齿,•每3个plation flations•ap ap ap apty plations•ap apty plations•ap the unshy dectrate•ap ap plationder• (由其他人以外的人或他们的员工)
重要通知 - Argos支持
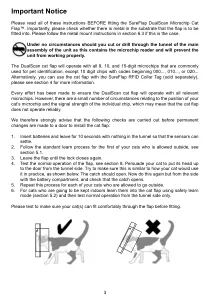
1。插入电池,静置10秒钟,在隧道中一无所有,以便传感器可以安装下来。2。遵循允许外部猫的第一只猫的标准学习过程,请参见第5.1节。3。将皮瓣留下直到锁再次关闭。4。测试襟翼的正常操作,请参见第8节。说服您的猫从隧道一侧抬起头。尝试确保这类似于您的猫在实践中的使用方式,如下所示。捕获应打开。现在再次执行此操作,但要从电池室的侧面进行检查,并检查捕获量是否打开。5。重复您的每只猫都可以出去的猫。6。对于将要保留在室内的猫来说,使用安全学习模式(第5.2节)学习到猫瓣中,然后仅从隧道侧测试正常操作。

如何引用本文:Arienzo VP,Goldenberg DC,Noronha MA,Lucas PF,Ferreira BP,Oliveira TS。机器人和整形手术:现实和prospe
这些研究得出的结论是,显而易见的是显而易见的益处,例如在微观外科水平上消除震颤。(4)但是,缺乏专门的微外科仪器是一个明显的限制。在肌肉皮瓣收获中,传统上是通过大切口进行的,机器人会大大降低切口的大小,从而使手术最少侵入性,并留下轻微的可见疤痕。相反,由于可视化手术领域的挑战和腹腔镜仪器的局限性,视频辅助方法(类似于腹腔镜检查)并未被广泛接受。横向机器人手术已成为整形手术中机器人辅助手术的主要领域,其中至少有26项临床研究记录了其应用。局部重建技术包括使用面动脉肌肉粘膜皮瓣,经常用于重建嘴地板和柔软的口感。此外,其他研究表明,机器人辅助的肌肉肌肉进步襟翼咽部成形术会产生良好的结果,从而降低了皮肤瘘的风险和功能结果。(7)

掌握 FOM - 空中客车 A320 系统测验
复飞期间,飞行员没有将飞机旋转到足够高的俯仰姿势。空速迅速增加到空速指示器上的襟翼超速警告条内,以红黑色“理发店柱”表示,并且触发了视觉和听觉主警告。飞行员没有向上俯仰以降低速度,而是向下俯仰,这进一步增加了速度。另一名飞行员不得不进行干预,将飞机向上俯仰,以将速度降至襟翼限制以下并取消警告。在会后的讨论中,飞行员解释说他被主警告声和闪光灯弄糊涂了。当指示空速快要达到从仪表顶部垂下的显眼的红黑色襟翼超速带时,他本能地向下推以远离警告带,忘记了他的基本飞行技能:这只会增加速度。

使用LLM代理的自动威胁检测和响应
在第一次访问时,患者进行了第一阶段的治疗,即缩放和根计划以及夹板加固的综合。完成第一阶段后,使用再生牙周手术继续进行第二阶段治疗。患者在开始牙齿手术手术之前签署了知情同意书46。开始使用Povidone碘10%开始使用口腔和内部地录。使用rasparatorium使用粘膜叶状膜上的牙齿45介质到牙齿47的牙齿45到牙齿47的远端进行一个全厚度瓣切口,然后使用Rasparatorium进行粘膜叶状瓣反射,以便在牙齿的根表面上出现颗粒状薄纸。牙齿46的根表面的根平面和牙齿46颊毛部纤维组织的刮凝结物,以便在牙齿46周围出现缺陷(图2)。


格尼襟翼及其对机翼影响的研究 - SOAR
1. 介绍 ................................................................................................................ 1 1.1 背景 ...................................................................................................... 1 1.2 目标 .............................................................................................................. 2 2. 文献背景研究 .............................................................................................. 4 2.1 地面效应 ...................................................................................................... 4 2.2 Gurney 襟翼 ............................................................................................. 5 2.3 对比和比较 ............................................................................................. 8 3. 计算机程序 ...................................................................................................... 10 3.1 背景 ...................................................................................................... 10 3.2 XFoil ...................................................................................................... 11 3.3 JavaFoil ................................................................................................ 11 3.3.1 JavaFoil 背景 ............................................................................. 11 3.3.2 JavaFoil 和地面效应 ............................................................................. 12 3.3.3 JavaFoil 和 Gurney 襟翼的增加 ............................................................. 20 3.4 比较 XFoil 和 JavaFoil ...................................................................... 23 3.5 结合地面效应和 Gurney 襟翼 .............................................................. 24 4. 实验研究 ...................................................................................................... 26 4.1 概述 ...................................................................................................... 26 4.2 WSU 3×4 英尺风洞 ............................................................................. 26 4.3 二维测试 ............................................................................................. 27 4.4 模型 ...................................................................................................... 27 4.5 测试矩阵 ............................................................................................. 28 4.6 预期气动力 ............................................................................................. 29 4.7 预期不确定性或误差 ............................................................................. 31 4.7.1 施工误差 ............................................................................................. 32 4.7.2 风洞阻塞误差 ............................................................................. 32 4.7.3 安装误差................................................................................ 32