XiaoMi-AI文件搜索系统
World File Search Systemflap

PC-12 失速保护系统
该系统由两台数字计算机、安装在左机翼和右机翼上的两个叶片式 A O A 传感器、一个摇杆振杆器、一个摇杆推杆执行器和警示装置组成。根据指定的 A O A 值,每台计算机向执行器发出摇杆激活、推杆激活或推杆停用命令。该系统的设置方式是,每台计算机都可以独立激活摇杆振杆器和音频警告,但激活摇杆推杆需要两台计算机的信号。为了在所有条件下保持摇杆振杆器、推杆推杆器和自然失速之间的足够速度裕度,触发摇杆振杆器和推杆执行器的 A O A 值取决于襟翼位置,并且当襟翼为 40º 时,取决于发动机扭矩。当空速低于失速警告限值时,飞行员会收到即将发生的失速警告
流感或肺炎球菌给药表...
此表中包含的人口统计和疫苗接种信息已由免疫接种点的第二位临床医生(而非免疫者)验证和确认,以确保并记录所有免疫记录的完整性和准确性。必须在发送(用于输入)或输入信息之前进行此验证(双重检查)并记录下来。所有填妥的纸质管理表都需要通过 Canada Post Xpress 邮寄,这被认为是一种安全的递送方式。这些表格必须放在信封中,封好信封口并在信封口上写上姓名首字母。然后将信封邮寄至:C/O GNB 数据输入团队 卫生部 HSBC Place 520 King Street, 4 楼接待处 Fredericton, NB E3B 5G8 每次邮寄信封时,您都必须发送电子邮件至 Phisisp@gnb.ca 通知他们信封已发送并提供以下信息:

Adapt-Prouner:适应性的结构修剪,用于有效的小语言模型培训
小语言模型(SLM)由于在边缘设备中的广泛应用而引起了学术界和行业的极大关注。为了获得具有强大性能的SLM,传统方法要么从头开始预训练模型,这会产生大量的计算成本,或者压缩/修剪现有的大语言模型(LLMS),这会导致性能下降,并且与预训练相比差不多。在本文中,我们研究了涉及结构化修剪和模型训练的加速方法家族。我们发现1)层面的适应性修剪(适应性培训)在LLM中非常有效,并且对现有的修剪技术的改善具有显着改善,2)适应性修剪,配备了进一步的训练导致模型,可与模型相当,与那些从抓挠中进行预训练的模型相当,3)逐步训练,仅通过促进培训,而仅通过互动而进行较小的培训(仅在较小的培训中),并且仅通过互动而进行互动(仅在较小的情况下),并且促进了较小的培训。一次5%)。对Llama-3.1-8b的实验结果表明,适应性抗性的表现要优于常规修剪方法,例如LLM-PRUNER,FLAP和SLICEGPT,平均在平均基准的准确度中以1%-7%的速度为1%-7%。此外,改编普朗纳(Adapt-Pruner)在MMLU基准测试上恢复了Mobilellm-125m的性能,并通过从其较大的对应物中修剪来降低代币,并发现了超过多个基准标记Llama-3.2-1B的新型1B模型。
NTSB/AAR-90/06
检查飞行员说,根据无襟翼/无前缘缝翼进近的经验,他知道必须使用动力来控制飞机的下降。他使用副驾驶的空速指示器和视觉提示来确定飞行路径和动力变化的必要性。他认为飞机在进近的后期与跑道对齐得很好,他们会到达跑道。此后不久,他观察到飞机位于预期着陆区域的左侧,并以高速度下降。他还观察到右翼开始下垂。他继续操纵1 号和3 号发动机油门,直到飞机接触地面。他说,在接近过程中没有使用稳定的动力,而且动力在不断变化。他认为他在接触地面之前增加了动力。

糖尿病患者营养性溃疡的手术减压研究......
R. Manoharan 1、A. Venkatasubramanian 1、Sanjeeva Raju Kunche 2 1 印度泰米尔纳德邦坦贾武尔医学院整形外科系助理教授 2 印度泰米尔纳德邦坦贾武尔医学院整形外科系研究生 摘要背景:足部慢性不愈合溃疡在糖尿病患者中很常见。这些溃疡出现在足底,并伴有足部感觉丧失。糖尿病足溃疡位于承重最大的部位,如大脚趾球、足跟垫、跖骨头、指尖。对于此类病例,手术治疗是最有效的治疗方式,采用内部卸载程序。本研究旨在评估手术卸载程序对糖尿病足患者营养性溃疡愈合的有效性。材料和方法:本研究在坦贾武尔医学院进行,样本量为 30 例糖尿病足患者,这些患者足底溃疡无法愈合。这是一项前瞻性描述性研究。获取患者完整病史,进行临床检查,并进行相关调查。计划进行适当的卸载手术,如凯勒关节置换术、浮动跖骨截骨术、屈肌腱切断术、肌腱转移术、琼斯转移术、皮瓣覆盖术等。通过适当的统计方法收集和分析数据。结果:30 名患者中,20 名是男性患者,10 名是女性患者。11 名患者接受了凯勒关节置换术,9 名患者接受了跖骨截骨术,5 名患者接受了 SSG,4 名患者接受了肌腱转移术,1 名患者接受了皮瓣覆盖术。溃疡愈合平均时间为 6.5 周,5 名患者因糖尿病未得到控制而出现伤口感染和裂开,2 名患者复发,90% 的患者溃疡在 9 周内愈合。结论:外科减压手术可有效治愈因神经病变和骨突引起的糖尿病足溃疡。与传统的足部减压方法(如穿鞋、打石膏和矫形器)相比,这些手术的复发率最低。通过这些内部减压手术,糖尿病患者溃疡不愈合的发病率有所降低,患者最早可在 6 周内重返工作岗位。

飞行训练指导多引擎飞行...
图表 图 1-1 典型的熟悉阶段飞行流程图 ...................................................................................... 1-1 图 1-2 功率设置 .............................................................................................................. 1-13 图 1-3 正常着陆模式(进近和全襟翼) ........................................................................ 1-32 图 1-4 无襟翼着陆模式 ...................................................................................................... 1-33 图 1-5 SSE 模式 ............................................................................................................. 1-37 图 1-6 SSE 着陆模式 ...................................................................................................... 1-41 图 2-1 空速和功率设置表 ............................................................................................. 2-6 图 2-2 转弯模式 ............................................................................................................. 2-7 图 2-3 Oscar 模式 ............................................................................................................. 2-8 图 2-4 Bravo/Charlie 模式 ............................................................................................. 2-9 图 2-5 Yankee 模式 ............................................................................................................. 2-12 图3-1 典型夜间熟悉阶段飞行流程图 ...................................................................................... 3-1 图 4-1 基础操作演习 .............................................................................................................. 4-6 图 4-2 标准仪表等级起飞最低标准 ...................................................................................... 4-9 图 4-3 表 IFR 归档标准 ...................................................................................................... 4-9 图 4-4 DINS 网页 ...................................................................................................... 4-14 图 4-5 IFR 起飞最低标准和障碍物离场程序 ............................................................................. 4-17 图 4-6 TERPS 设计选项 ...................................................................................................... 4-18 图 4-7 飞行员导航 SID ............................................................................................................. 4-21 图 4-8 向量 SID ............................................................................................................. 4-22 图 4-9 带飞行员导航的向量 SID ............................................................................................. 4-23 图 4-10 军用 SID ............................................................................................................. 4-24 图 4-11 土木工程 SID ............................................................................................................. 4-25 图 4-12 切割圆弧 .............................................................................................................4-34 图 4-13 等待空速 ............................................................................................................. 4-35 图 4-14 复制等待指令 ...................................................................................................... 4-36 图 4-15 等待航线进入技术 ............................................................................................. 4-38 图 4-16 等待航线进入程序 ............................................................................................. 4-38 图 4-17 三重漂移 ............................................................................................................. 4-41 图 4-18 低空进近类别细分 ............................................................................................. 4-55 图 4-19 已建立的进场表 ............................................................................................. 4-57 图 4-20 TERPS PT 保护空域 ............................................................................................. 4-57 图 4-21 45˚/180˚ 机动 ............................................................................................................. 4-58 图 4-22 泪滴形进入 ............................................................................................................. 4-60 图 4-23 直接进入................................................................................................................ 4-61 图 4-24 HILO 进近 .......................................................................................................... 4-62 图 4-25 图示泪滴形进近 ...................................................................................................... 4-63 图 4-26 弧形/PT 进近 ...................................................................................................... 4-64 图 4-27 正常配置程序 ...................................................................................................... 4-66 图 4-28 使用连续下降最后进近的进近示例 ............................................................................. 4-70 图 4-29 垂直下降角/目视下降点 ............................................................................................. 4-73................................. 4-57 图 4-21 45˚/180˚ 机动 .............................................................................................. 4-58 图 4-22 泪滴形进入 ........................................................................................................ 4-60 图 4-23 直接进入 ........................................................................................................ 4-61 图 4-24 HILO 进近 ...................................................................................................... 4-62 图 4-25 图示泪滴形 ...................................................................................................... 4-63 图 4-26 弧形/PT 进近 ...................................................................................................... 4-64 图 4-27 正常配置程序 ........................................................................................................ 4-66 图 4-28 使用连续下降最后进近的进近示例 ........................................................................ 4-70 图 4-29 垂直下降角/目视下降点 ........................................................................................ 4-73................................. 4-57 图 4-21 45˚/180˚ 机动 .............................................................................................. 4-58 图 4-22 泪滴形进入 ........................................................................................................ 4-60 图 4-23 直接进入 ........................................................................................................ 4-61 图 4-24 HILO 进近 ...................................................................................................... 4-62 图 4-25 图示泪滴形 ...................................................................................................... 4-63 图 4-26 弧形/PT 进近 ...................................................................................................... 4-64 图 4-27 正常配置程序 ........................................................................................................ 4-66 图 4-28 使用连续下降最后进近的进近示例 ........................................................................ 4-70 图 4-29 垂直下降角/目视下降点 ........................................................................................ 4-73
2024 年 4 月月度总结成就.pdf
• 位于特里凡得琅的 Sree Chitra Tirunal 医学科学技术研究所 (SCTIMST) 开发的 AG Chitra 结核病诊断试剂盒于 2024 年 4 月 8 日推出。SCTIMST 开发了该试剂盒作为开放平台系统,以提供经济实惠、快速且准确的肺结核诊断。在成功通过独立验证后,中央药品标准控制组织 (CDSCO) 已批准该试剂盒的生产和商业化。该结核病试剂盒可用于任何 qPCR 机器,这意味着在大流行期间建立的现有 COVID-19 检测基础设施可用于大规模结核病筛查。 • 国际粉末冶金和新材料高级研究中心 (ARCI) 完成了由椰子壳和竹粉制成的可生物降解容器应用阻隔涂层工艺的技术诀窍演示,并将技术诀窍文件移交给班加罗尔 Agropak Pvt Ltd.。作为 CARS-DRDO 项目的一部分,为截止阀组件开发了 HD 石墨基组件、瓣式密封件、碳衬套和活塞环。
霍克海怒 T Mk 20,G-RNHF - GOV.UK
飞机于 13:09 起飞,起飞时转向西北。飞行员看到飞行轨迹上有些天气,于是将飞机转向东,朝着更晴朗的天空飞行。当飞机驶向作战区域时,飞行员注意到油压很低。他立即通知了 ATC,拨打了 PAN PAN 呼叫,然后转向机场。发动机继续运转,但飞行员描述说它相当“不平稳和不稳定”。他试图将 G-RNHF 定位在 04 号跑道上着陆,但在放下起落架和襟翼以增加下降速度后,发动机完全失灵,机身发出几次“剧烈的撞击声”,然后卡住,螺旋桨静止不动。飞行员无法使螺旋桨顺桨,阻力增加意味着无法飞抵机场。飞行员向空中交通管制发出求救信号。飞机在距 04 号跑道入口约 0.6 海里处坠毁。飞机断成几段,但两名乘客都能在无人协助的情况下从驾驶舱中脱身。
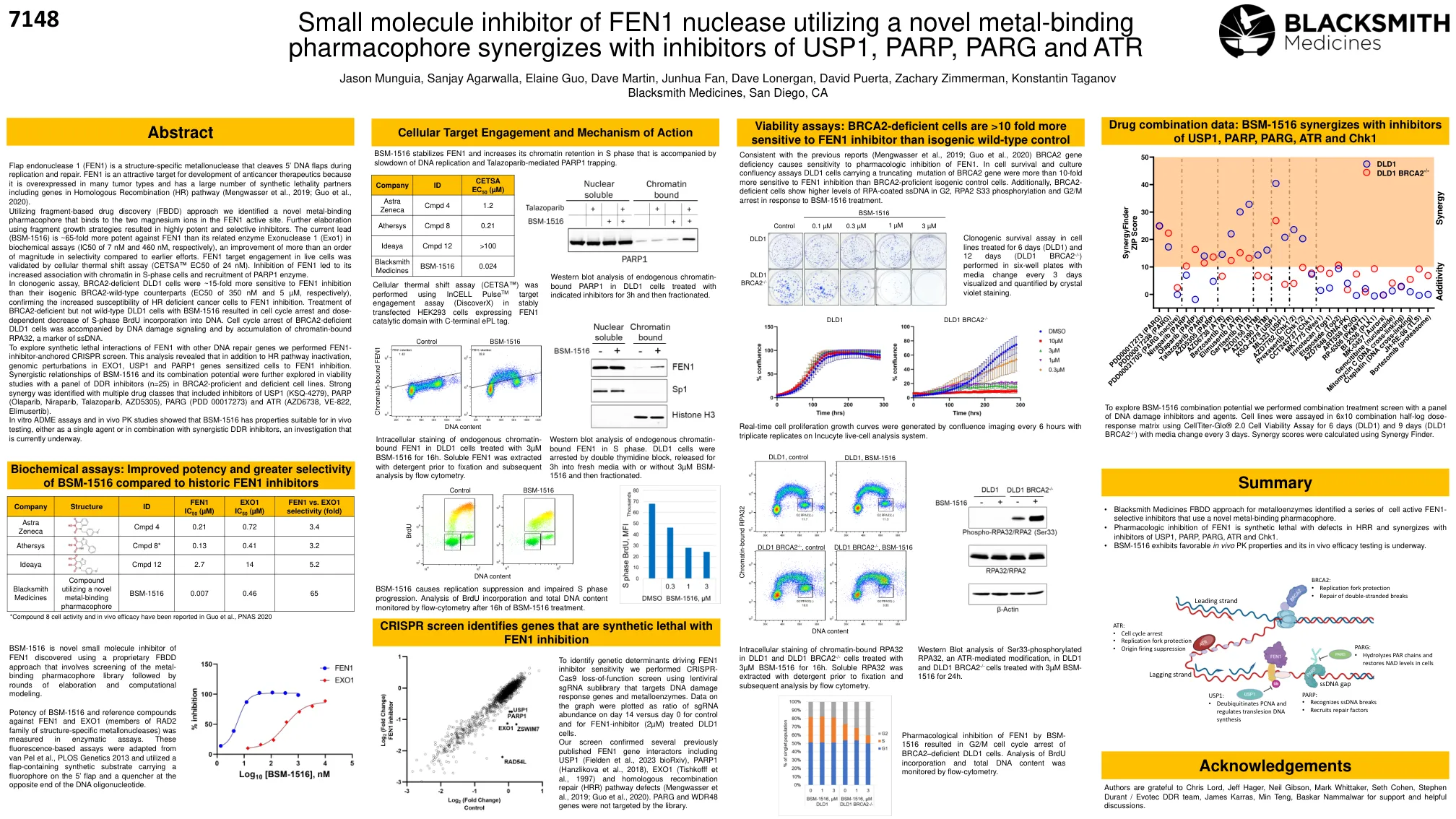
使用新型金属结合药效团与USP1,PARP,PARG和ATR抑制剂协同的Fen1核酸酶的小分子抑制剂
皮瓣核酸内切酶1(Fen1)是一种结构特异性的金属核酸酶,在复制和修复过程中切割5'DNA瓣。fen1是开发抗癌疗法的有吸引力的靶标,因为它在许多肿瘤类型中过表达,并且具有大量的合成致死性伴侣,包括同源重组基因(HR)途径(Mengwasser等,2019; Guo等,2020)。利用基于碎片的药物发现(FBDD)方法,我们确定了一种新型的金属结合药效团,该药效团与Fen1活性位点中的两个镁离子结合。使用碎片增长策略进一步阐述导致高度有效和选择性抑制剂。在生物化学测定中(分别为7 nm和460 nm的IC50),对FEN1的当前铅(BSM-1516)对FEN1的有效性比其相关酶外核酸酶1(EXO1)高65倍,与早期努力相比,改善了量的更大范围。fen1靶标在活细胞中的靶标参与通过细胞热偏移分析验证(CETSA

使用跟腱同种异体移植物和远端的Sural Artery N
阿喀琉斯肌腱破裂根据诊断的时间归类为急性或慢性,慢性破裂表现出相当大的手术挑战。此病例报告详细介绍了一名58岁男子的管理,该男子出现了慢性开放性跟腱破裂,并伴有大型软组织缺陷。受伤事故引起的伤害因伤口坏死和感染而变得更加复杂。手术管理涉及使用同种异体移植物重建跟腱,以及使用远端的孔疗法神经皮瓣的缺陷覆盖率。术后结局是有利的,疼痛和功能能力都有明显改善。在术后六个月时,患者表现出完全的移植物整合,令人满意的功能恢复以及恢复日常活动,而没有踝关节不稳定的迹象。此病例证明了肌腱同种异体重建的功效,并结合了血管化的皮瓣覆盖范围,在管理复杂的跟腱损伤和大量组织损失的情况下。有必要进行进一步的研究以评估这种方法的长期成功。