XiaoMi-AI文件搜索系统
World File Search Systemformable

可成型热轧带钢的疲劳性能
致谢 iv 概要 v 目录 viii 表格列表 xi 图表列表 xiii 名词术语 xvi 引言 1 2. 文献综述 5 2.1 抗疲劳设计 5 2.2 应变控制疲劳试验程序 7 2.2.1 历史和理论 7 2.2.2 带钢的应变控制疲劳 14 2.3 制造变量对疲劳性能的影响 15 2.3.1 成分 15 2.3.2 取样位置 17 2.3.3 带钢厚度 17 2.3.4 疲劳性能的各向异性 18 2.3.5 总结及在实验项目中的应用 18 2.4 一般材料性能与疲劳性能之间的关系疲劳性能 19 2.4.1 硬度和抗拉强度性能之间的关系。 19 2.4.2 循环应力-应变性能与抗拉强度性能和硬度之间的关系 20 2.4.3 循环应变-寿命性能与单调抗拉性能和硬度之间的关系 24 2.4.4 微观结构的影响 39 2.5 结论 39 3. 实验设计、材料、技术和结果 41 3.1 实验设计 41 3.1.1 多种钢材的疲劳性能表征 41 3.1.2 制造变量对疲劳响应的影响 42 3.1.3 钢材性能对疲劳响应的影响 45 3.2 材料; 45 3.2.1 钢材的来源和取样 45 3.2.2 钢材的描述 46 3.3 疲劳试验 49 3.3.1 方法 49 3.3.2 结果 53 3.3 微观结构和硬度 55 3.4.1 方法 55 3.4.2

高度结构化和稀疏的线性变换
我们引入了一种名为 De formable Butterfly (DeBut) 的新型线性变换,它概括了传统的蝴蝶矩阵,可以适应各种输入输出维度。它继承了传统蝴蝶从细粒度到粗粒度的可学习层次结构,当部署到神经网络时,DeBut 层中突出的结构和稀疏性构成了一种新的网络压缩方法。我们将 DeBut 用作标准全连接层和卷积层的直接替代品,并证明了其在均质化神经网络方面的优势,并使其具有轻量级和低推理复杂度等优良特性,同时不影响准确性。DeBut 层的无数变形所带来的自然复杂性-准确性权衡也为分析和实践研究开辟了新的空间。代码和附录可公开获取:https://github.com/ruilin0212/DeBut 。
工程与应用科学技术杂志
针对我们的特定推力要求,为 STP 选定的材料是铝 6061(密度 2700 kg/m3),因为它具有以下特点:• 强度:铝 6061 是一种坚固的合金,可用于对强度要求很高的应用中。它常用于结构应用,例如飞机和船架。• 成形性:它是一种成形性极佳的合金,可以轻松弯曲、塑形和挤压。这使其成为各种应用的理想选择,例如制造汽车零部件和创建定制产品。• 可焊性:它是一种可焊合金,可以使用多种焊接方法轻松焊接。• 耐腐蚀性:它是一种耐腐蚀合金,可用于需要担心腐蚀的应用。• 成本:容易获得且比其他拟议材料便宜。
用于骨科应用的干细胞和细胞骨基质产物
• AmnioFix® (MiMedx) • Bio4™ Viable Bone Matrix (formely known as Ovation®) (Osiris Therapeutics/Stryker) • Bone marrow aspirate • Cellentra™ VCBM (Viable Cell Bone Matrix) (ZimVie) • CeLLogix™ (Omnia Medical) • Clarix® Cord 1K (BioTissue) • FiberCel® (Aziyo Biologics)•脂质®微碎片脂肪组织移植系统•Magnus®骨移植(皇家生物学)•MAP3®(RTI手术)•Osteocel®Plusand Pro and Pro and Pro(nuvasive) Primagem®高级同种异体移植(Zimmer Biomet)•RegeNEXX(再生科学)•Scylla™和Scylla™-F(室脊柱)•TrinityEvolution®和Elite®(Orthofix Inc. (Depuy合成)。
避免碰撞的可变形物体的多动物传输
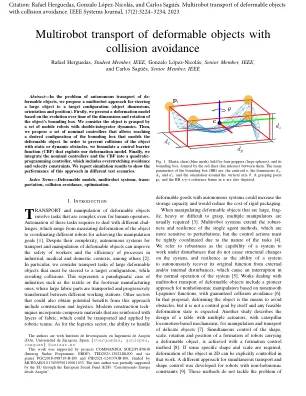
摘要 - 在自动运输可塑造对象的问题中,我们提出了一种多机器人方法,将大对象转向目标配置(对象维度,方向和位置)。首先,我们基于对象边界框的尺寸和旋转时间的演化提出了一个变形模型。我们认为该对象是由一组带有双积体动力学的移动机器人抓住的。然后,我们提出了一组名义控制器,允许达到建模可变形对象的边界框的所需配置。为了防止对象与静态或动态障碍物的碰撞,我们制定了利用我们变形模型的控制屏障函数(CBF)。最后,我们将标称控制器和CBF集成到二次编程控制器中,其中包括过度拉伸的回避和速度约束。我们报告模拟结果,以显示在不同的测试方案中这种方法的性能。

dr-robot.pdf
摘要:接受大量视觉数据训练的视觉基础模型已显示出空前的推理和计划技能。将它们应用于机器人任务的关键挑战是视觉数据和动作数据之间的方式差距。我们引入了可区分的机器人渲染,这是一种方法,允许机器人体的视觉外观相对于其控制参数直接差异。我们的模型整合了运动学意识的模型和高斯人的裂开,并与任何机器人形式和自由度兼容。我们证明了它在范围中的功能和用法,包括重建了来自图像的机器人姿势和通过视觉语言模型控制机器人。定量和定性结果表明,我们可直接从像素的机器人控制提供了有效的机器人控制梯度,为Vision Foundity模型在机器人技术中的未来应用奠定了基础。交互式演示和其他可视化措施可在以下网址提供:drrobot.cs.columbia.edu/。

微观结构领域的当前挑战和机遇...
这是一篇关于先进高强度钢 (AHSS) 微观结构-性能关系理解的最新进展的观点论文。这些合金构成一类高强度可成型钢,主要设计为运输部门的板材产品。AHSS 通常具有非常复杂和多层次的微观结构,由铁素体、奥氏体、贝氏体或马氏体基体或这些成分的双相或甚至多相混合物组成,有时还富含沉淀物。这种复杂性使建立可靠的、基于机制的微观结构-性能关系具有挑战性。目前已有许多关于不同类型 AHSS 的优秀研究(例如双相钢、复相钢、相变诱导塑性钢、孪生诱导塑性钢、贝氏体钢、淬火和分配钢、压硬钢等),并且出现了几篇概述,其中讨论了它们的与机械性能和成型相关的工程特征。本文回顾了该领域微观结构和合金设计的最新进展,特别关注了利用复杂位错亚结构、纳米级沉淀模式、变形驱动转变和孪生效应的含锰钢的变形和应变硬化机制。本文还回顾了微合金纳米沉淀硬化钢和压硬化钢的最新发展。除了对其微观结构和性能进行批判性讨论外,还评估了它们的抗氢脆和损伤形成等重要特性。我们还介绍了应用于 AHSS 的先进表征和建模技术的最新进展。最后,讨论了机器学习、全过程模拟和 AHSS 的增材制造等新兴主题。这一观点的目的是找出这些不同类型的先进钢材在变形和损伤机制上的相似之处,并利用这些观察结果促进它们的进一步发展和成熟。