XiaoMi-AI文件搜索系统
World File Search SystemiD
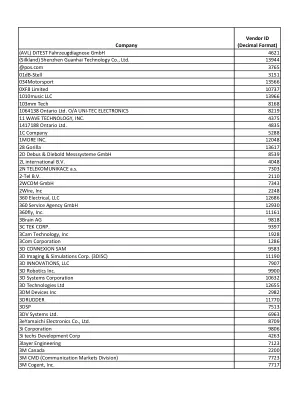
供应商 ID
公司供应商 ID(十进制格式)(AVL)DiTEST Fahrzeugdiagnose GmbH 4621 (Silkland) 深圳市观海科技有限公司 13944 @pos.com 3765 01dB‐Stell 3151 034Motorsport 13566 0XF8 Limited 10737 1010music LLC 13966 103mm Tech 8168 1064138 Ontario Ltd. O/A UNI‐TEC ELECTRONICS 8219 11 WAVE TECHNOLOGY, INC. 4375 1417188 Ontario Ltd. 4835 1C Company 5288 1MORE INC. 12048 28 Gorilla 13617 2D Debus & Diebold Messsysteme GmbH 8539 2L international BV 4048 2N TELEKOMUNIKACE as 7303 2‐Tel BV 2110 2WCOM GmbH 7343 2Wire, Inc 2248 360 Electrical, LLC 12686 360 Service Agency GmbH 12930 360fly, Inc. 11161 3Brain AG 9818 3C TEK CORP. 9397 3Cam Technology, Inc 1928 3Com Corporation 1286 3D CONNEXION SAM 9583 3D Imaging & Simulations Corp. (3DISC) 11190 3D INNOVATIONS, LLC 7907 3D Robotics Inc. 9900 3D Systems Corporation 10632 3D Technologies Ltd 12655 3DM Devices Inc 2982 3DRUDDER 11770 3DSP 7513 3DV Systems Ltd. 6963 3eYamaichi Electronics Co., Ltd. 8709 3i Corporation 9806 3i techs Development Corp 4263 3layer Engineering 7123 3M Canada 2200 3M CMD(通信市场部门) 7723 3M Cogent, Inc. 7717
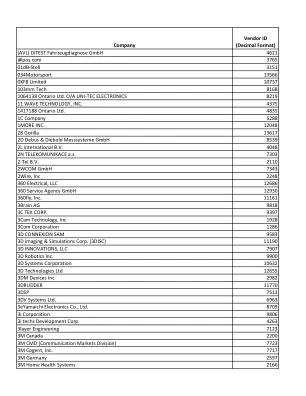
供应商ID
Company Vendor ID (Decimal Format) (AVL) DiTEST Fahrzeugdiagnose GmbH 4621 @pos.com 3765 01dB‐Stell 3151 034Motorsport 13566 0XF8 Limited 10737 103mm Tech 8168 1064138 Ontario Ltd. O/A UNI‐TEC ELECTRONICS 8219 11 WAVE TECHNOLOGY, Inc。43751417188 Ontario Ltd. 4835 1C公司5288 1More Inc.12048 28 Gorilla 13617 2D Debus&Diebold Messsysteme GmbH 8539 2L国际B.V. 4048 4048 2N TELEKOMUNIKIKACE A.S. 7303 2 -TEL B.V. 2110 2WCOM GMBH 7343 2WIRE,INC 2248 360 ELECTRICAL,LLC 12686 360服务机构服务机构GmbH 12930 360Fly,Inc. 11161 3Brain AG 9818 3C Tek Corp.TekCorp。93973CAM Technology,9397 3CAM Technology,Inciention Corpor Corper corpor corpor corportion&Inimention Corpion Corpion Corpion Corciation&Inmeration Cormitation&Concition 1286 3-33 3-3:SAMN 3-3-3-3-3-3-3-3-3-3 conex&conex& (3DISC)11190 3D Innovations,LLC 7907 3D Robotics Inc. 9900 3D Systems Corporation 10632 3D Technologies LTD 12655 3DM Depplices Inc 2982 3Drudder 11770 3DSP 7513 3DDSP 7513 3DV Systems Ltd. 6963 333 3 Electriation cocoration cocoration cocoration co.909 3 ec.8709090990909090909090909090909. 3i Techs Development Corp 4263 3 Layer Engineering 7123 3M Canada 2200 3M CMD(通信市场部)7723 3M Cogent,Inc。7717 3M德国2597 3M Home Health Systems 2166


将所有权从身份证持有人转让给身份证持有人
信用卡/借记卡、支票或汇票用于支付注册费(每年注册费 45 美元)。转让车辆如果在过去 30 天内通过了检查,则最长允许 2 年。)注意:- 发起人和列出的联名/共同所有人必须在转让时在场或提供授权书以出售他们一半的车辆 - 并非所有德国保险公司都会为在 USAREUR-AF 系统中注册的车辆提供保险。发起人有责任在注册前确保公司的合规性。- 列为留置权人的德国银行必须提供书面授权,授权车辆将在 USAREUR-AF 系统中注册。- 注册剩余时间少于 60 天且未通过检查的车辆可能会在获得 USAG Stuttgart DES 批准后作为非运营车辆转让。需要签署 AE 表格 190-1AI。

ID 集成 InfiniID.qxd
SCAN/DCR 每年出版 24 期,出版时间为每月第二和第四个星期五,出版方为:RMG Enterprises, Inc. 4003 Wood St. Erie, PA 16509 PH (814) 866-1146 网站 http://www.scandcr.com 版权所有 © 2015 RMG Enterprises, Inc. 联邦版权法禁止以任何方式(包括影印或传真分发)未经授权复制本版权通讯。此类版权侵权行为最高可处以 25,000 美元罚款。由于订阅是我们的主要收入来源,因此通讯出版商非常重视版权侵权行为。一些出版商已起诉侵权行为并赢得巨额和解。为了鼓励您遵守此法律,我们以大幅降低的价格提供多份订阅。订阅:电子版每年 597 美元。

案件编号:241201154
MORGAN & MORGAN MORGAN & MORGAN K. Clancy Boylan, Esq., Rene F. Rocha, Esq.,* ID No. 314117 LA Bar No. 34411 2005 Market Street, St. 350 400 Poydras Street, Suite 1515 Philadelphia, PA 19103 New Orleans, LA 70130 (215) 446-9795 (504) 636-6310 (215) 446-9799(传真) (504) 636-6301(传真) cboylan@forthepeople.com rrocha@forthepeople.com www.forthepeople.com www.forthepeople.com MORGAN & MORGAN SEEGER WEISS LLP T. Michael Morgan, Esq.,* Christopher A. Seeger, Esq.,* FL Bar No. 62229 新泽西州律师协会编号 042631990 20 N Orange Ave., Suite 1600 cseeger@seegerweiss.com Orlando, FL 32801 Parvin K. Aminolroaya, Esq.* (407) 418-2031 新泽西州律师协会编号 028492008 (407) 245-3384(传真) paminolroaya@seegerweiss.com mmorgan@ForThePeople.com 55 Challenger Road www.forthepeople.com Ridgefield Park, NJ 07660 (212) 584-0700 SEEGER WEISS LLP (212) 584-0799(传真) Dave Buchanan, Esq. www.seegerweiss.com ID 号 320392 dbuchanan@seegerweiss.com MORGAN & MORGAN Frazar Thomas, Esq., Frank Petosa, Esq.,* ID. 号 325478 FL 律师执照号 972754 fthomas@seegerweiss.com 8151 Peters Road, Suite 4000 325 Chestnut Street Plantation, FL 33324 Suite 917 (954) 318-0268 Philadelphia, PA 19106 (954) 327-3018(传真) T 973-639-9100 fpetosa@forthepeople.com F 973-679-8656 www.forthepeople.com 原告律师 *等待准许临时副职