XiaoMi-AI文件搜索系统
World File Search SystemiD

YC1089-M - FCC 编号
BR/蓝牙 5.2/长距离 +10 dBm TX 功率,1dB/步进 -99 dBm RX 灵敏度 @ BLE 1 Mbps -96 dBm RX 灵敏度 @ BLE 2 Mbps 集成平衡-不平衡转换器,单端输出,直接连接到天线 6.3 mA RX 系统电流 @ BLE 1 Mbps -99 dBm 灵敏度(3V 理想 DC-DC 转换器) 5.9 mA RX 系统电流 @ BLE 1 Mbps -97 dBm 灵敏度(3V 理想 DC-DC 转换器) 9.5 mA TX 系统电流(3V 理想 DC-DC 转换器,0 dBm) 电源管理
id grand Rounds
Zoom Jessica Queen博士是医学博士约翰·霍普金斯大学医学院的肿瘤学辅助肿瘤学副教授,马里兰州巴尔的摩的约翰·霍普金斯大学医学院。她在西蒙斯学院获得了生物化学的BS,以及西北大学的MD和Microbiology/Immunology博士学位。,她在威尔·康奈尔医学院(Weill Cornell Medical College)和约翰·霍普金斯(Johns Hopkins)的传染病奖学金中完成了内科住院医师培训。作为医师科学家,皇后博士的目标是结合其临床和研究技能,以改善患者健康,因为它与胃肠道中的感染性病原体和共生生物有关。她的研究目前侧重于与宿主基因和宿主免疫系统的微生物组相互作用,在结肠癌的背景下。与她在实验室和医院的努力并行,皇后博士热衷于指导来自科学和医学的历史上的学生。加入Zoom会议:

响应ID ANON-6YQ8-E15V-S
4。至少让所有合同中至少有1/3的合同与只有全新植物有资格的条件持续15年的持续时间(在一半的持续时间中,对于具有重大翻新 /升级的新植物或植物,其余合同的其余部分都可以很短,所有工厂都可以为所有的植物提供了对新技术的财务稳定性,也许是私人的,既有私有化的,也可能是私有化的(自privative and Propiving),因为它是私人的,并且是私人的企业。需求),没有15年以上的合同来承销收入(例如catos,oftos,rocs,cfds)。每个这样的规定都是市场扭曲。通过让普通合同15年以上,市场扭曲被删除。在15年时,合同的1/3合同为45年,这是正确的。在15年时,合同的1/3合同为45年,这是正确的。
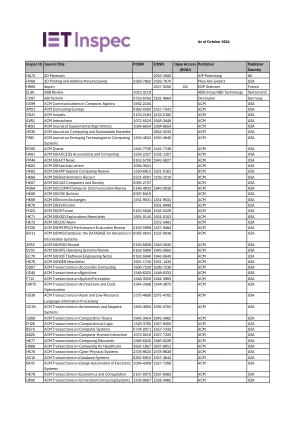
Inspec ID 期刊
EG05 ACM 队列 1542-7730 1542-7749 ACM USA HK61 ACM SIGACCESS 可访问性和计算 1558-2337 1558-1187 ACM USA FM46 ACM SIGACT 新闻 0163-5700 1943-5827 ACM USA HK62 ACM SIGAda Ada 快报 1094-3641 ACM USA HK63 ACM SIGAPP 应用计算评论 1559-6915 1931-0161 ACM USA HK66 ACM SIGBioinformatics 记录 2331-9291 2159-1210 ACM USA HK67 ACM SIGCAS 计算机和社会 0095-2737 ACM USA AO64 ACM SIGCOMM 计算机通信评论 0146-4833 1943-5819 ACM USA HK68 ACM SIGCSE 简报 0097-8418 ACM USA HK69 ACM SIGecom 交流 1551-9031 1551-9031 ACM USA HK70 ACM SIGEVOlution 1931-8499 ACM USA FN23 ACM SIGIR 论坛 0163-5840 1558-0229 ACM USA HK71 ACM SIGKDD 探索简报 1931-0145 1931-0153 ACM USA HK72 ACM SIGLOG 新闻 2372-3491 ACM USA FD38 ACM SIGMETRICS 绩效评估评审 0163-5999 1557-9484 ACM USA BH11 ACM SIGMIS 数据库:信息系统进步的数据库
事件ID:bprepe
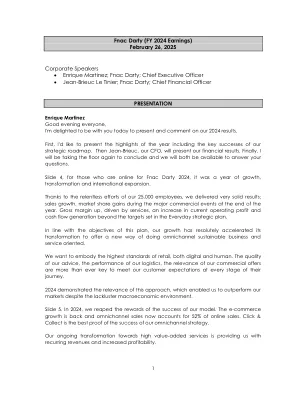
演讲恩里克·马丁内斯(Enrique Martinez)晚上好,我很高兴今天与您一起介绍我们的2024年结果。首先,我想介绍今年的亮点,包括我们战略路线图的主要成功。然后,我们的首席财务官Jean-Brieuc将提出我们的财务业绩。 最后,我将再次将地板结束,我们俩都可以回答您的问题。 幻灯片4,对于那些在线FNAC DARTY 2024的人来说,这是增长,转型和国际扩张的一年。 多亏了我们25,000名员工的不懈努力,我们取得了非常稳定的结果:销售增长,在年底的主要商业活动期间的市场份额增长。 在服务驱动的驱动下,当前营业利润和现金流量的增加超出了日常战略计划中设定的目标。 符合该计划的目标,我们的增长绝对加速了其转型,以提供一种新的方式,以实现全渠道的可持续业务和服务。 我们想体现数字和人类的最高零售标准。 我们建议的质量,物流的表现,我们的商业报价的相关性比以往任何时候都更加关键,可以在旅途的每个阶段达到我们的客户期望。 2024证明了这种方法的相关性,尽管宏观经济环境乏味,这使我们能够胜过市场。 幻灯片5。 在2024年,我们收获了模型成功的回报。 电子商务增长又回来了,现在全渠道销售额占在线销售的52%。然后,我们的首席财务官Jean-Brieuc将提出我们的财务业绩。最后,我将再次将地板结束,我们俩都可以回答您的问题。幻灯片4,对于那些在线FNAC DARTY 2024的人来说,这是增长,转型和国际扩张的一年。多亏了我们25,000名员工的不懈努力,我们取得了非常稳定的结果:销售增长,在年底的主要商业活动期间的市场份额增长。在服务驱动的驱动下,当前营业利润和现金流量的增加超出了日常战略计划中设定的目标。符合该计划的目标,我们的增长绝对加速了其转型,以提供一种新的方式,以实现全渠道的可持续业务和服务。我们想体现数字和人类的最高零售标准。我们建议的质量,物流的表现,我们的商业报价的相关性比以往任何时候都更加关键,可以在旅途的每个阶段达到我们的客户期望。2024证明了这种方法的相关性,尽管宏观经济环境乏味,这使我们能够胜过市场。幻灯片5。在2024年,我们收获了模型成功的回报。电子商务增长又回来了,现在全渠道销售额占在线销售的52%。单击和收集是我们全渠道策略成功的最佳证明。我们对高增值服务的持续转型正在为我们提供经常出现的收入和提高的盈利能力。
响应ID anon-2HEH-VSUY-X
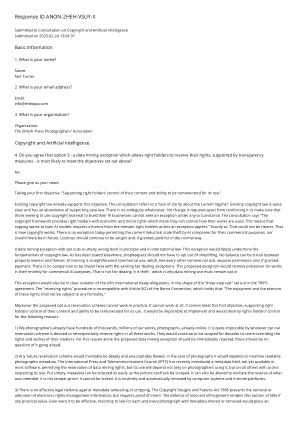
采用您的第一个目标,“支持权利持有人对其内容的控制权和有报酬的使用能力。”现有的版权法已经支持这一目标。咨询是指“对当前政权的缺乏”。现有的版权法非常明确,并且具有丰富的支持判例法。没有任何歧义。除了加强它以确保寻求使用版权材料来建立AI业务的人都不能在任何情况下寻求例外的人,不需要更改。 咨询说:“版权框架为正确的持有人提供了经济和道德权利,这意味着他们可以控制其作品的使用方式。 这意味着复制用于培训AI模型的工作要求相关权利持有人的许可证,除非适用。” 这还不清楚。 这就是版权的工作方式。 今天没有例外,允许AI公司出于其商业目的进行当前的工业规模盗窃,将来也不应有。 应继续寻求许可,并以正常方式支付。 在原则上和国际法中,具有OPT OUTS的数据挖掘例外都是完全错误的。 这个例外将致命地破坏不需要更改。咨询说:“版权框架为正确的持有人提供了经济和道德权利,这意味着他们可以控制其作品的使用方式。这意味着复制用于培训AI模型的工作要求相关权利持有人的许可证,除非适用。”这还不清楚。这就是版权的工作方式。今天没有例外,允许AI公司出于其商业目的进行当前的工业规模盗窃,将来也不应有。应继续寻求许可,并以正常方式支付。在原则上和国际法中,具有OPT OUTS的数据挖掘例外都是完全错误的。这个例外将致命地破坏
id grand Rounds
Zoom William Werbel博士是约翰·霍普金斯(Johns Hopkins)的医师科学家,其主要兴趣是优化免疫强化人员的机会性感染,尤其是在实体器官移植后,使用流行病学和翻译方法的结合。在密歇根大学的医学博士培训和西北费恩伯格医学院的医学博士培训后,他在约翰·霍普金斯大学完成了临床和研究奖学金。他获得了K23职业发展奖(NIAID),以研究彭博公共卫生学院的艾滋病毒患者的临床调查,研究严重感染以及博士学位。他是约翰·霍普金斯移植研究中心的流行病学和定量科学副总监,是免疫促进性人群(EPOC)同时研究的全国新兴病原体的主要研究者,以及NIH资助的COVID-COVID-19的协议成员,获得了COVID-19的协议成员。加入Zoom会议:https://uits-arizona.zoom.us.us.us/j/6736439286?pwd = qnipx1bgwefygndmy6cgdsbf8i6l7t.1&omn = 8954971093密码:88888639 88888639

DICKET ID ED-2024-SCC-0136
继续进行BPS研究的续性,而部门主要寻求有关BPS研究的评论和建议,而提前则通过2025/30和2030/35的其他同类人群延续了BPS研究。BPS研究提供了有价值的信息,例如残疾学生的持久性和毕业率,并允许我们的组织等组织学习残疾政策和实践如何随着时间的推移产生影响。在BPS研究中修改残疾和与健康相关的问题以进行BPS研究的未来迭代,强烈敦促该部门修改与残疾和健康状况有关的问题,以便反映出对大学生和残疾服务专业人员如何概念化残疾的最新了解。更新的问题和语言将允许更多的输入和清晰的信息。例如,可以改进BPS研究中以下质疑以反映残疾的最新概念:•许多残疾问题询问病情是否“严重”,导致许多学生不自我报告