XiaoMi-AI文件搜索系统
World File Search SystemiD




Norzaini Zainal 国籍 研究员 ID 作者 ID ORCID
1. 《国际纳米电子和材料杂志》(IJNeaM)编委(2017-2019) 2. USM-CREST 合作 GaN on GaN 项目主要成员(2015-2020) 3. 《ECS 杂志》审稿人(2018)。 4. 《印度物理学杂志》审稿人(2018)。 5. 《自然》科学报告审稿人(2018)。 6. 《应用表面科学》审稿人(2017) 7. 《合金与化合物杂志》审稿人(2017) 8. 《半导体加工材料科学》审稿人(2017)。 9. 阿卜杜拉国王科技大学(KAUST)半导体与材料光谱组客座研究员(2017)。 10. 论文审稿人,《应用表面科学》,(2016) 11. 加州大学圣巴巴拉分校(UCSB)材料系访问研究员,(2016)。 12. 论文审稿人,《表面与涂层技术》(2015)。 13. 论文审稿人,《半导体加工材料科学》,(2015)。 14. 论文审稿人,《固体电子学》,(2015)。 15. 论文审稿人,《超晶格与微结构》,(2014)。 16. 论文审稿人,《半导体加工材料科学》,(2014)。 17. 论文审稿人,《热物理与传热杂志》,(2014)。 18. 论文审稿人,《应用表面科学》,(2013)。 19. 论文审稿人,《泰巴科学大学期刊》,(2013)。 20. 论文审阅人,胶体和表面 A,(2013)。 21. 论文审阅人,先进材料研究,(2013)。 22. 物理学当前研究国际研究生课程特邀演讲人(2013) 23. 纳米材料制造和先进表征方法研讨会特邀演讲人(2012) 24. 纳米材料制造和先进表征方法研讨会特邀演讲人(2012) 25. 短期资助(USM 级别)审阅人 26. 1 篇博士论文和 3 篇硕士论文的内部审查人 27. 3 篇硕士论文的外部审查人

职位编号:IQOQIVIE034DOC124
奥地利科学院 (OeAW) 维也纳量子光学与量子信息研究所 (IQOQI-Vienna) 是奥地利领先的非大学研究和科学机构,致力于推进知识并增强人类对自然及其规律的理解。我们还积极追求量子信息科学的愿景以及它将为人类开辟的广泛新可能性。为此,我们在量子物理学和量子信息物理学的基础上进行理论和实验研究,并开发新的量子技术。该研究所提供
文档 ID:6310948
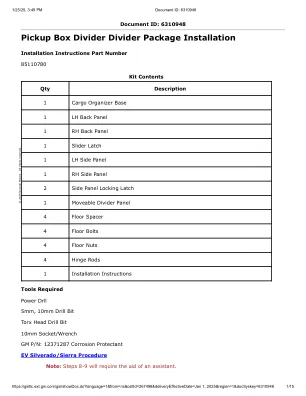
为该应用选择正确的零件号。需要更换的紧固件或需要使用螺纹锁固剂或密封剂的紧固件在维修程序中标明。除非另有规定,否则请勿在紧固件或紧固件接头表面使用油漆、润滑剂或腐蚀抑制剂。这些涂层会影响紧固件扭矩和接头夹紧力,并可能损坏紧固件。安装紧固件时,请使用正确的拧紧顺序和规格,以避免损坏零件和系统。7. 将螺栓 (2) 放在位置一(左侧)或位置三(右侧)孔中。安装四个

10-K - 零件编号
请勾选表明注册人是否为《证券法》第 405 条所定义的知名成熟发行人。 是 ☐ 否 ☒ 请勾选表明注册人是否无需根据《交易法》第 13 条或 15(d) 条提交报告。 是 ☐ 否 ☒ 请勾选表明注册人:(1) 在过去 12 个月内(或注册人需要提交此类报告的更短时间内)已提交《交易法》第 13 条或 15(d) 条要求提交的所有报告,以及 (2) 在过去 90 天内是否一直遵守此类提交要求。是 ☒ 否 ☐ 请勾选表明注册人在过去 12 个月内(或注册人被要求提交此类文件的更短时间内)是否已根据 S-T 条例第 405 条(本章第 232.405 节)以电子方式提交了所有需要提交的交互式数据文件。 是 ☒ 否 ☐ 请勾选表明注册人是大型加速申报人、加速申报人、非加速申报人、小型报告公司还是新兴成长型公司。请参阅《交易法》第 12b-2 条中对“大型加速申报人”、“加速申报人”、“小型报告公司”和“新兴成长型公司”的定义。 大型加速申报人 ☐ 加速申报人 ☐
伊拉克第三批身份证件
官方分发:美国陆军和海军陆战队现役和预备役部队 FA 单位:向军炮兵、师炮兵、FA/火力旅、旅战斗队 (BCT)、斯瑞克 BCT、团战斗队单位和海军陆战队团指挥部和战场协调支队 (BCD) 分发 7 份;向 FA/火力营分发 13 份;向火力支援部队 (FSE)、火力和效果小组 (FEC)、火力支援小组 (FSC)、火力支援协调中心 (FSCC)、部队火力协调中心 (FFCC) 和独立炮兵连或支队分发 7 份。此外,与 FA 或火力支援人员、问题、材料、理论、培训、组织或设备合作的其他美国政府机构可能会要求提供有限数量的免费副本。这些包括但不限于其他部门或服务单位、培训中心、学校、招募司令部、战备小组、图书馆、教育中心、项目经理、兵工厂、实验室、州副官长、联络官、军事学院、后备军官训练团、主要司令部、军事武官和公共事务办公室。

Nordic ID HH83
北欧ID HH83提供了电池“热交换”功能,用户可以从Android“ Power Off”菜单(在1秒内按下电源按钮时显示)。此功能允许卸下(放电的)电池并在几秒钟内安装充满电的电池,从而在具有额外的电池进行更换时允许设备的使用时间更大。

提交ID:ARTPL_149S1
现场表演者经常将“向观众玩耍”描述为根据感知到的观众反应的重点,时机甚至内容的转变。传统舞台允许通过观众的眼睛,皮肤,气味,呼吸,发声和诸如跳舞,冲压和鼓掌的动作传播生理信号,其中一些是可听见的。互联网和其他大众媒体扩大了对实时性能的访问,但是它们会掩盖传统的“ livesice”渠道,我们将其指定为生理反馈循环,这些反馈循环通过共享代理来绑定表演者和受众群体。在在线活动中,当代表演者享受基于文本和基于图标的反馈,但是当前的技术限制了远程受众对生理反应的表达。寻找未来的神经元互联网