XiaoMi-AI文件搜索系统
World File Search SystemiD

FH系列ID | Bi3FH系列ID | Bi3
Thermal Sensor & Optics Array Format (NTSC) 640 × 512 Detector Type Long-life, uncooled VOx microbolometer Pixel Pitch 17 μm Thermal Frame Rate NTSC: 30 Hz or PAL: 25 Hz / 8.3 Hz Optical Characteristics Model FOV Focal Length F/# 669 69° × 56° 9 mm F1.4 644 44° × 36° 13毫米F1.0 625 25°×18°25毫米F1.1 617 17°×14°×35 mm F1.1 612 12°×10°×10°50 mm F1.2 610 10°×8.2°×8.2°60 mm F1.2 608 8.6°×6.6°×6.6°75 mm for1.17.5 rangertry for 1.5 complars for1um for1um for1.17.5 comprild consextral formral formral formral formral formral for1um formands Spectrral formral formral formral formran (NEDT)<30 MK @ 25°C(77°F)F#1.0可见光照明摄像机传感器类型4K 2160P(3840×2160)光学特性模型默认FOV FOV焦距F/#669 98°×55°×55°×55°3.6-10 mm 1.5°1.5 -2.5-2.8 644 63°×35555555555-1.8 62-16-1.8 63°×33°MM MM MMMMMM MMMMMM ×20°9-22毫米1.4-1.7 617 24°×14°13-55毫米1.6-2.2 612 17°×10°×13-55毫米1.6-2.2 610 14°×8°×8°×8°13-55 mm 1.6-2.2 608 11°×6°×6°13-2.2 luntivity and IDETITION and IDETITY 0.2 lixt and IDETITY 0.2 lindiv tivide and lintivity and Iteide 0.2 lunt lunt tide Iteide and Iteide 0.2 lund Iteide and Iteide 0.2 lund lunt lunt (@(f1.6 agc on,30 fps)b/w:0.10 lux(@(f1.6 agc on,30 fps)可见帧速率30 Hz hz 264/h.265或m-jpeg的独立渠道或M-jpeg(除外4K),可见和热流分辨率分辨率和热流分辨率:热流:热:vga(640×51)(640×51), 4K(3840×2160),1080p(1920×1080),720p(1280×720)&VGA(640×480)次级流:热:Thermal:VGA(640×512),QVGA(320×256),可见(320×256) (640×480)热图像设置
id Manchester SRF
第6节。基于地点原理45简介46原理1。人类对撞机47原理2。Connected, open and accessible 49 Principle 3: A living landscape 54 Principle 4: A flexible framework for flexible buildings 59 Principle 5: Platform for the future, built on foundations of the past 61 Principle 6: Curated Commons 68 Principle 7: Critical mass 72 Principle 8: An identity that expresses purpose and place 75 Principle 9: Sustainable and regenerative 78 Principle 10: Creative meanwhile use of buildings and spaces 81第7节。说明性总体规划83简介85 Sackville Street大楼和Vimto Park 86 Altrincham Street,Arches and London Road 90 Shore Sparen Spane Spares Spare Spaces在IDM 94 Water Street 98连接路线和空间101 South-West Quarts 102 102节8.说明性交付计划104说明性递送计划105词汇表106词汇表107

参考编号:5484095 - accessdata.fda.gov
2.4 制备和给药 重构 • TRODELVY 是一种危险药物。 • 遵循适用的特殊处理和处置程序 1。 • 根据患者在每个治疗周期开始时的体重计算所需的 TRODELVY 剂量 (mg)(如果患者的体重自上次给药以来变化超过 10%,则计算频率更高)[见剂量和给药(2.2)]。 • 让所需数量的小瓶升温至室温。 • 使用无菌注射器,将 20 mL 0.9% 氯化钠注射液 (USP) 缓慢注入每个 180 mg TRODELVY 小瓶中。每个小瓶都包含过量填充以补偿制备过程中的液体损失,重构后,总体积的浓度为 10 mg/mL。 • 轻轻旋转小瓶,让其溶解长达 15 分钟。不要摇晃。只要溶液和容器允许,在给药前应目视检查肠外药物产品是否有颗粒物和变色。溶液应无可见颗粒,清澈呈黄色。如果溶液浑浊或变色,请勿使用。• 立即使用以制备稀释的 TRODELVY 输液溶液。
参考编号:5454933 - accessdata.fda.gov
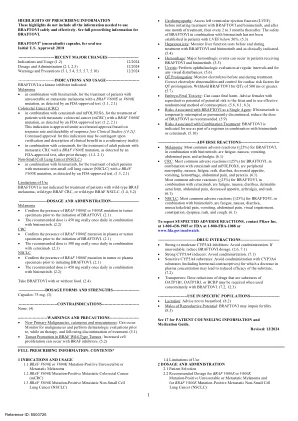
------------------------警告和注意事项----------- 中枢神经抑制作用和日间损害:损害警觉性和运动协调性,包括晨间损害。与其他中枢神经系统 (CNS) 抑制剂一起使用时风险会增加。对于服用 QUVIVIQ 的患者,请注意第二天不要开车和其他需要完全精神警觉的活动。(5.1) 抑郁/自杀意念恶化:可能会出现抑郁或自杀意念恶化。(5.2) 睡眠瘫痪、入睡前/入睡后幻觉和猝倒样症状:可能在使用 QUVIVIQ 时出现。(5.3) 复杂的睡眠行为:可能出现包括梦游、睡眠驾驶和在未完全清醒时从事其他活动等行为。如果出现复杂的睡眠行为,请立即停药。(5.4) 呼吸功能受损:应考虑对呼吸功能的影响。 (5.5,8.7) 需要评估合并症诊断:如果失眠症状在 7 至 10 天后仍然存在,则重新评估。(5.6)

参考编号:5472319 - accessdata.fda.gov
∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙警告和注意事项∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙ • 胰腺炎:临床试验中有报告。如怀疑患有胰腺炎,应立即停药。如确诊为胰腺炎,请勿重新开始使用(5.2)。 • 糖尿病视网膜病变并发症:临床试验中有报告。应监测有糖尿病视网膜病变病史的患者(5.3)。 • 切勿在患者之间共用 OZEMPIC 笔,即使更换了针头(5.4)。 • 低血糖:与胰岛素促泌剂或胰岛素同时使用可能会增加低血糖的风险,包括严重低血糖。可能需要减少胰岛素促泌剂或胰岛素的剂量(5.5)。 • 急性肾损伤:监测肾功能不全患者报告的严重胃肠道不良反应(5.6)。 • 超敏反应:已报告严重超敏反应(例如过敏反应和血管性水肿)。如怀疑有此情况,应停止使用 OZEMPIC 并立即就医(5.7)。 • 急性胆囊疾病:如怀疑有胆结石或胆囊炎,则应进行胆囊研究(5.8)。 • 全身麻醉或深度镇静期间的肺吸入:据报道,接受 GLP-1 受体激动剂治疗并接受择期手术或程序的患者出现此情况。指导患者将任何计划的手术或程序告知医疗保健提供者。(5.9)。
参考ID:5371673 -AccessData.fda.gov
在研究1中评估了Xoleremdi的安全性,这是一项随机的安慰剂对照试验,该试验的31例成人和儿科患者12岁及以上患有怀疑综合症[见临床研究(14)]。患者基于年龄和体重(n = 14)或安慰剂(n = 17),患者接受了400 mg或200 mg的Xoleremdi。一名患者接受了200 mg剂量,13例患者接受了400 mg剂量。请注意,建议使用200 mg Xoleremdi每日剂量用于接受强CYP3A4抑制剂的患者[见剂量和给药(2.1和2.2)]。对于所有其他患者,建议的剂量为每天400毫克(如果体重超过50 kg)或每天300毫克(如果重50千克),除非需要降低剂量,否则由于与中等CYP3A4抑制剂或P-GP抑制剂同时使用,需要降低剂量。
参考ID:5500726 -AccessData.fda.gov
•心肌病:在启动Braftovi和Binimetinib治疗之前,在治疗一个月后,然后每2至3个月进行治疗,评估左心室射血分数(LVEF)。在LVEF低于50%的患者中,尚未确定Braftovi与Binimetinib结合使用的安全性。(5.3)•肝毒性:在Braftovi和Binimetinib治疗前后,监测肝功能测试以及临床上所示。(5.4)•出血:接受Braftovi和Binimetinib的患者可能发生重大出血事件。(5.5)•葡萄膜炎:定期进行眼科评估,以进行任何视觉干扰。(5.6)•QT延长:在治疗前后监测电解质。正确的电解质异常和QT延长心脏风险因素的控制。QTC的braftovi扣留为500毫秒或更高。(5.7)•胚胎毒性:可能造成胎儿伤害。为胎儿具有潜在风险的生殖潜力的女性提供建议,并使用有效的非激素避孕方法。(5.8,8.1,8.3)•与Braftovi相关的风险是单个代理:如果Binimetinib暂时中断或永久停产,请按建议减少Braftovi的剂量。(5.9)•与联合治疗相关的风险:Braftovi被指示作为与Binimetinib或Cetuximab结合使用的治疗方案的一部分。(5.10)
患者ID指南EPIC
诺华对任何EHR工具的实施,测试和正在进行的操作概不负责。如果您对使用这些指南有任何疑问,请参考您的内部IT/IS部门。这些工具不是为任何认证要求而设计的,也没有被证明满足。此手册中包含的说明适用于Epic平台,并且不能保证适用于任何其他软件平台。

参考编号:5094829 - accessdata.fda.gov
14.1 已知或疑似卵巢癌患者 一项随机、多中心、开放标签研究 (NCT03180307) 评估了 CYTALUX 的安全性和有效性。该研究招募了 178 名被诊断或高度临床怀疑患有卵巢癌的女性,她们计划接受初次手术细胞减灭术、间歇性减瘤术或复发性卵巢癌手术。150 名女性接受了 CYTALUX 治疗(剂量为 0.025 mg/kg,在开始荧光成像前至少 1 小时给药)。其中,134 名女性接受了正常光和 CYTALUX 评估(意向成像集)。人口统计特征是平均年龄 60 岁(范围 33 至 81 岁),85% 白人,4% 亚洲人,5% 黑人或非裔美国人,3% 美洲印第安人或阿拉斯加原住民,3% 其他种族,11% 西班牙裔或拉丁裔,2% 未报告的种族。