XiaoMi-AI文件搜索系统
World File Search SystemiD

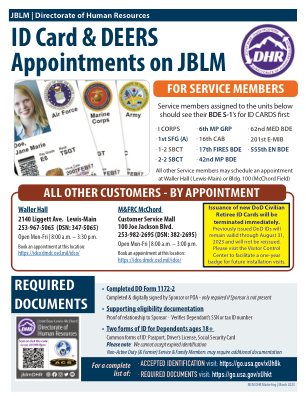
真实身份法案实施注意事项
当地颁发的就职徽章和/或通行证 DBIDS 凭证 出生证明(无照片复印件) 美国社会保障局颁发的社会保障卡 过境卡(DSP-150 表格) 难民旅行证件(I-571 表格) 美国公民身份(N-560 或 N-561 表格) 美国入籍证书或公民身份证书(N-550 表格) 工作授权文件(I-766 表格) 美国公民身份证(I-197 表格) 美洲原住民部落照片身份证 美国军队或征兵记录 带有临时(I-551)印章或机器可读移民签证上印有临时(I-551)字样的外国护照。 包含照片、姓名和有效期的学校 ID(仅适用于未成年人) 包含姓名和地址的车辆登记证(必须与不合规驾驶执照上的地址相符) 显示个人姓名和主要居住地址的水电费账单(必须与不合规驾驶执照上的地址相符) 选民登记卡

ID LOGISTICS 物流平台 - vaucluse.gouv.fr
3.4 土壤和水................................................................................................................................ 27
国防部标准... - ID 集成
1.本标准已获准供国防部 (DoD) 的所有部门和机构使用。2.本期 MIL-STD-130 为实施机器可读信息 (MRI) 流程进行物品识别标记和促进自动数据采集提供了进一步的澄清和更深入的见解和指导。MRI 完全基于非政府标准,为从采购到制造再到物流和最终处置的生命周期资产管理提供了宝贵的工具。但是,对于已识别物品的许多最终用户来说,应用自由文本信息物品识别标记仍然是必要的。找到两种标记协议的最有效用途(单独使用或组合使用)是采购活动的主要责任。3.本标准提供了产品设计人员制定特定物品识别标记要求的标准。产品设计人员必须在产品定义数据中包括有关标记内容、大小、位置和应用过程的具体要求。仅在产品定义数据中说明标记符合本标准对于初始制造和后续补充备件生产是不够的。4.第 3 节中提供的定义以及本标准中使用的定义主要面向产品设计人员对现行工程文档术语的使用。可能会与自动识别技术学科中应用的术语发生一些冲突。已尽一切努力确定潜在冲突并提供清晰的定义以供本标准应用,并引用现有定义的已发布来源。5.采购活动也必须在其合同文书中正确应用本标准。与产品设计师一样,仅仅说明根据合同生产的物品应按照 MIL-STD-130 进行标记是不够的。他们必须明确说明需要进行物品识别标记,并且特定物品标记要求的制定应基于本标准中提供的标准。6.有关本文档的评论、建议或问题应发送至 754 ELSG/ ILMT, 4170 Hebble Creek Rd,。Bldg 280, Door 15, Wright-Patterson AFB OH 45433-5653,或发送电子邮件至 AFCode16@wpafb.af.mil。由于联系信息可能会发生变化,您可能需要使用 ASSIST Online 数据库验证地址信息的最新状态

桑福德健康计划身份证
如有疑问,请致电:Sanford Health Plan NDPERS • 客户服务 – 福利资格索赔状态和查询 (800) 752-5863 (800) 499-3416 • 利用管理 – 事先授权 (800) 805-7938 (888) 315-0885 • 药房部门 – 处方保险或药物授权 (855) 305-5062 (877) 658-9194


职位 ID:IQOQIIBK043DOC124 量子研究所...
• 物理学硕士学位 • 具有冷原子和量子气体实验中使用的实验技术实践经验,特别是激光和光学装置、真空技术、电子技术 • 冷却和捕获超冷原子以及量子气体显微镜的实验知识 • 具有物理系统数据分析和理论建模经验 • 了解一般量子系统的理论描述以及特定超冷偶极量子气体背景下的多体系统 • 优秀的口头和书面英语能力 • 能够在团队中工作并向社区展示科学成果 • 满足因斯布鲁克大学博士生的官方要求我们提供: • 在充满活力的环境中从事有趣的活动领域 • 弹性工作时间安排 • 有机会在创新团队中工作 • 为员工提供众多社会福利
4322087 文档参考编号:A2013356
本研究为密码学和反情报研究、教育、历史和分析目的而编写。其知识产权基于 SRG-NT,不包含任何可能被公开为/ii 的窃听案例的完整故事,该 SRG-NT 不被视为合法或非法行为的依据。一些关于第 19 项研究的信息来自一项非法和反情报工作:克格勃或吉夫林的名单上出现的名字不能作为该皮尔逊以合法或合法的方式与俄罗斯情报部门有牵连的确切证据。这些情报人员中有些人是忠诚的,从未受到过怀疑。其他人可能有时是合作来源协助武装部队或其他美国/盟军部队。一些生物实体已被关押。

英飞凌 ID Key S USB
请注意!本文件仅供参考,本文提供的任何信息在任何情况下均不视为对我们产品的任何功能、条件和/或质量或任何特定用途适用性的保证、担保或描述。关于我们产品的技术规格,我们恳请您参考我们提供的相关产品数据表。我们的客户及其技术部门需要评估我们的产品是否适合预期用途。
国防部标准... - ID 集成
前言 前言 1.本标准已获准供国防部 (DoD) 的所有部门和机构使用。2.本期 MIL-STD-130 为实施用于物品识别标记的机器可读信息 (MRI) 流程提供了更多见解和指导。MRI 完全基于非政府标准,为从采购到制造再到物流的资产管理提供了宝贵的工具。但是,对于已识别物品的许多最终用户来说,应用人可读 (HRI) 物品识别标记仍然是必要的。找到两者的最有效用途(单独使用或组合使用)是采购活动的首要责任。3.本标准提供了产品设计人员制定特定物品识别标记要求的标准。产品设计人员必须在产品定义数据中包括有关标记内容、大小、位置和应用过程的具体要求。仅在产品定义数据中说明标记符合本标准对于初始制造和后续补充备件生产是不够的。4.第 3 节中提供的定义以及本标准中使用的定义主要面向产品设计人员对现行工程文档术语的使用。可能会与自动信息技术学科中应用的术语发生一些冲突。已尽一切努力确定潜在冲突并提供清晰的定义以供本标准应用,并引用现有定义的已发布来源。5.采购活动也必须在其合同文书中正确应用本标准。与产品设计师一样,仅仅说明根据合同生产的物品应按照 MIL-STD-130 进行标记是不够的。他们必须明确说明需要进行物品识别标记,并且特定物品标记要求的制定应基于本标准提供的标准。6.有关本文件的评论、建议或问题应发送至:MSG/MMF,4375 Chidlaw Rd.,Bldg 262,Rm S008,Wright-Patterson AFB OH 45433-5006,或发送电子邮件至 AFCode16@wpafb.af.mil。由于联系信息可能会发生变化,您可能需要使用 ASSIST Online 数据库(http://assist.daps.dla.mil)验证此地址信息的最新情况。