XiaoMi-AI文件搜索系统
World File Search SystemiD
记录 ID 公司名称 地址 ...
BL-001288 C&L Stairs and Millwork, Inc. 7029 El Sereno Cir Sacramento CA 95831 9163433683 03/28/2023 3/28/2025 承包商 BL-001289 Iyer Tutoring 10551 Cypress Ct cupertino CA 95014 03/28/2023 3/28/2025 一般业务 一般业务 BL-001291 Tiki Sweetz 1 Apple Park Wy Cupertino CA 95014 03/30/2023 3/30/2025 一般业务 餐厅和食品服务 BL-001293 Level construction LLC 14451 branham Ln san jose CA 95124 4086288958 2023 年 3 月 1 日 2025 年 3 月 1 日 承包商 BL-001296 Exit 9, Inc. DBA Love in the Mix
![[ID] 2023 年影响报告 - Maxima](/simg/0\0ea3f58792e911251f841f18a1af9b8abe987dd3.webp)
[ID] 2023 年影响报告 - Maxima
2023 年,Maxima 踏上了转型之旅,我们将重点关注所谓的“培育影响力”,其中涵盖了广泛的举措。这包括赋予利益相关者权力和加强鼓励积极变革的环境。建立影响力还意味着培育一个支持建设性转型、有机成长和发展的生态系统。这一理念与我们对系统思维的承诺产生了强烈共鸣,而系统思维是我们组织精神的支柱之一。
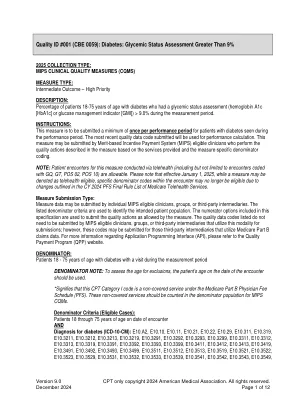
质量 ID #1 (CBE 0059):糖尿病
E10.3551、E10.3552、E10.3553、E10.3559、E10.3591、E10.3592、E10.3593、E10.3599、E10.36、E10.37X1、E10.37X2、E10.37X3、E10.37X9、E10.39、E10.40、E10.41、E10.42、E10.43、E10.44、E10.49、E10.51、E10.52、E10.59、E10.610、E10.618、E10.620、E10.621、E10.622、E10.628、E10.630、 E10.638, E10.641, E10.649, E10.65, E10.69, E10.8, E10.9, E11.00, E11.01, E11.21, E11.22, E11.29, E11.311, E11.319, E11.3211, E11.3212, E11.3213, E11.3219, E11.3291, E11.3292, E11.3293, E11.3299, E11.3311, E11.3312, E11.3313, E11.3319, E11.3391, E11.3392, E11.3393, E11.3399, E11.3411,E11.3412,E11.3413,E11.3419,E11.3491,E11.3492,E11.3493,E11.3499,E11.3511,E11.3512,E11.3513,E11.3519,E11.3521,E11.3522,E11.3523,E11.3529,E11.3531,E11.3532,E11.3533,E11.3539,E11.3541,E11.3542,E11.3543,E11.3549,E11.3551,E11.3552,E11.3553, E11.3559, E11.3591, E11.3592, E11.3593, E11.3599, E11.36, E11.37X1, E11.37X2, E11.37X3, E11.37X9, E11.39, E11.40, E11.41, E11.42, E11.43, E11.44, E11.49, E11.51, E11.52, E11.59, E11.610, E11.618, E11.620, E11.621, E11.622, E11.628, E11.630, E11.638, E11.641, E11.649, E11.65, E11.69, E11.8, E11.9, E13.00, E13.01, E13.10, E13.11, E13.21, E13.22, E13.29, E13.311, E13.319, E13.3211, E13.3212, E13.3213, E13.3219, E13.3291, E13.3292, E13.3293, E13.3299, E13.3311, E13.3312, E13.3313, E13.3319, E13.3391, E13.3392, E13.3393, E13.3399, E13.3411, E13.3412, E13.3413, E13.3419, E13.3491, E13.3492, E13.3493, E13.3499, E13.3511, E13.3512, E13.3513, E13.3519, E13.3521, E13.3522, E13.3523, E13.3529, E13.3531, E13.3532, E13.3533, E13.3539, E13.3541, E13.3542, E13.3543, E13.3549, E13.3551, E13.3552, E13.3553, E13.3559, E13.3591, E13.3592, E13.3593, E13.3599, E13.36, E13.37X1, E13.37X2, E13.37X3, E13.37X9, E13.39, E13.40, E13.41, E13.42, E13.43, E13.44, E13.49, E13.51, E13.52, E13.59, E13.610, E13.618, E13.620, E13.621, E13.622, E13.628, E13.630, E13.638, E13.641, E13.649, E13.65, E13.69, E13.8, E13.9, O24.011、O24.012、O24.013、O24.019、O24.02、O24.03、O24.111、O24.112、O24.113、O24.119、O24.12、O24.13、O24.311、O24.312、O24.313、O24.319、O24.32、O24.33、O24.811、O24.812、O24.813、O24.819、O24.82、O24.83 并且绩效期间的患者会诊(CPT 或 HCPCS):97802、97803、97804、98000、98001 98002、98003, 98004, 98005, 98006, 98007, 98008, 98009, 98010, 98011, 98012, 98013, 98014, 98015, 98016, 99202, 99203, 99204, 99205, 99212, 99213, 99214, 99215, 99341, 99342, 99344, 99345, 99347, 99348, 99349, 99350, 99385*, 99386*, 99387*, 99395*, 99396*, 99397*、G0270、G0271、G0402、G0438、G0439 且非分母排除:在测量期间任何时间为患者提供的临终关怀服务:G9687 或在测量期间任何时间为患者提供的姑息治疗服务:G9988 或在测量期间连续 90 天以上接受机构特殊需求计划 (SNP) 或长期护理(POS 代码为 32、33、34、54 或 56)的患者:G2081 或 66 岁及以上的患者,在测量期间至少有一次虚弱索赔/遭遇,并且在测量期间或测量期前一年配发了痴呆症药物:G2090 或 66 岁及以上的患者,在测量期间至少有一次虚弱索赔/遭遇,并且在测量期间或测量期前一年诊断出晚期疾病:G2091

《真实身份法案》:问答
2005 年,国会通过了《真实身份证法案》,作为国防、全球反恐战争和海啸救援紧急补充拨款法案 (HR 1268) 的一部分,乔治·W·布什总统于 2005 年 5 月 11 日签署该法案。1 该法案规定,自法案颁布三年后(即 2008 年 5 月起),不符合该法案要求的驾驶执照和州身份证将不被接受用于任何明确定义的“官方”联邦目的。2 根据该法案,“‘官方目的’包括但不限于进入联邦设施、登上联邦监管的商用飞机、进入核电站以及国土安全部长确定的任何其他目的。” 3 迄今为止,美国国土安全部 (DHS) 将“官方目的”定义为仅包括“进入联邦设施、登上联邦监管的商用飞机和进入核电站”。 4 如下所述,国土安全部一再延长州驾照必须符合《真实身份法案》标准的截止日期,才能被接受用于这些目的。《真实身份法案》的范围仅限于为可能被接受用于某些联邦目的的文件设定要求,因为联邦政府不能合法地征用各州的驾照签发权和资源来强制要求各州的驾照符合特定要求。但其效果是迫使许多州修改其驾照签发要求以遵守该法案。

卡特里娜飓风最新动态
纽约和新英格兰。这些小母牛的饲料包括副产品,例如面包房废料、糖果废料、罐头豌豆、无穗甜玉米青贮饲料、胡萝卜和/或其他可用物品。每年约有 3,000 头动物被出售,其中一些出口到墨西哥和加拿大。为什么这家农业企业每周会从纽约、宾夕法尼亚州和康涅狄格州收到 1,000 吨面包房废料?这里有一个例子可以解释:一名面粉厂工人在一大堆面粉中丢失了手机。该公司决定减少损失并注销这批面粉,而不是支付寻找手机的人工费用或因手机或搜索过程污染面粉而招致可能的诉讼。他们打电话给 Baskin Livestock 来取这车面粉,这些面粉被加入到牲畜饲料中。{如果一头外星人奶牛吃了手机,她就可以打电话回家……)。


SureFood® 动物 ID 测试套件
其次,物种鉴定所需的透明度可能具有重要意义,无论是定性还是定量。定量分析可以检测出任何虚假的碎肉数量声明,如“碎肉中 50% 的猪肉/牛肉”。此外,第二个应用是宗教规则(清真、犹太教)的保证。在这种情况下,任何声明义务的技术门槛都是不被容忍的,但特别是对于食品中猪肉的检测,需要零容忍。因此,分析测试系统应该具有最大的灵敏度。
编号全名Scopus ID Slok,作者年份的个人资料中的系统
2023经济学,计量经济学和金融(其他)52-й地理,规划与发展43-й环境科学(杂项)38-й食品科学34-й商业与国际管理30-й运输26-й运输26-й管理科学和运营科学与运营研究25-й66。Turabay Guldana,Mailybaeva Gulmira,Seitenova Salima,Meterbayeva Kulbarshyn,Duisenbayev Abay,Ismailova Gulnara
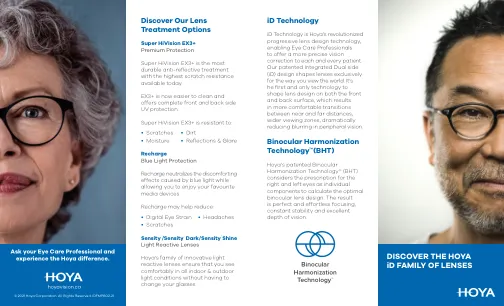
发现Hoya ID镜头家族
ID技术是Hoya革命性的进步镜头设计技术,使眼保健专业人员能够为每个患者提供更精确的视力校正。 我们专利的综合双面(ID)设计专门为您的世界方式而形成镜头。 他是在前后表面和背面塑造镜头设计的第一个也是唯一的技术,这会导致近距离和远距离之间的更舒适的过渡,更广阔的观看区域,从而大大降低了外围视觉中的模糊。ID技术是Hoya革命性的进步镜头设计技术,使眼保健专业人员能够为每个患者提供更精确的视力校正。我们专利的综合双面(ID)设计专门为您的世界方式而形成镜头。他是在前后表面和背面塑造镜头设计的第一个也是唯一的技术,这会导致近距离和远距离之间的更舒适的过渡,更广阔的观看区域,从而大大降低了外围视觉中的模糊。
