XiaoMi-AI文件搜索系统
World File Search Systemigital

调节网络朋克现实:私人身体修改和“身体黑客攻击”的危险
©Zachary Paul Birnbaum,2021。* J.D.候选人2021,马里兰大学弗朗西斯·金·凯里法学院。作者要感谢他的《商业与技术法杂志》上的编辑,他们的支持和奉献精神将他的想法完善到本文中。作者还要感谢Rauschecker教授的指导,最重要的是他的妻子Libby Dorman,他的父母Michel和Gina Birnbaum,以及他的公婆Todd和Lisa Dorman的无条件爱与支持,而没有他的无条件的爱与支持。1。参见埃德·卡明(Ed Cumming),威廉·吉布森(William Gibson):明天看到的那个人,guardian(2014年7月28日),https://www.theguardian.com/books/books/2014/jul/28/william-gibson-gibson-neuromancer-cyberpunk-books; Hari Kunzru,《沙丘》,50年:科幻小说如何改变世界,G uardian(2015年7月3日),https://www.theguardian.com/books/books/books/2015/jul/03/jul/03/dune-50-all-50-all-science-novice-fiction-noviction-novection-novel--novel-world-world; HBO的西部船长的西方创作者会说AI,Sentience and Surveelance,F ast C Ompany(2016年9月30日),https://www.fastcompany.com/3063743/hbos-westwork-westword-westworld-ceratworld-ceratworld-ceratworld-talk-ai-ai-ai-senience-sentience-sentience-sentience-anderience-and-sentience-and-sentience-anderverillance。2。美联社,在工作中的机器人:瑞典员工被微芯片植入,t elegraph(4月4,2017),https://www.telegraph.co.uk/technology/2017/04/04/cyborgs-work-swedish-plosement-mosport-getting-metplant-microchips/。 3。 Tyler Lacoma,您需要了解的有关Neuralink的所有信息:Elon Musk的新事业,D Igital T票(2017年11月7日),https://wwwww.digitaltrends.com/cool-tech/neuralink-tech/neuralink-ellink-elon-musk/。 4。 5。4,2017),https://www.telegraph.co.uk/technology/2017/04/04/cyborgs-work-swedish-plosement-mosport-getting-metplant-microchips/。3。Tyler Lacoma,您需要了解的有关Neuralink的所有信息:Elon Musk的新事业,D Igital T票(2017年11月7日),https://wwwww.digitaltrends.com/cool-tech/neuralink-tech/neuralink-ellink-elon-musk/。4。5。eyder peralta,“身体黑客”运动在道德答案之前上升,NPR(2016年2月27日),https://www.npr.org/2016/02/02/27/4683666630/-body-hacking-mod-hacking-movement-movement-movement-movement-movement-head-imahead-imahead-imahead-ob-moral-answers-moral-answers;一般参见塞加尔·塞缪尔(Sigal Samuel),生物黑客如何试图升级自己的大脑,身体和人性,v ox(jun。25,2019),https://www.vox.com/future-perfect/2019/6/6/25/18682583/biohacking-transhumanism-人类 - 人类 - 人类启程 - genticetion-genetic-gentice-gention-gention-gention-gention-gention-gention-gention-gention-gention-gention-gention-gention-gention-gention-gention-gentionering-grispr。Jayne Ponder,GAO报告呼吁采用联邦隐私法,ISCE PRIVACY(2019年2月24日),https://www.insideprivacy.com/data-privacy/gao-report-calls-fort-calls-for-for-for-forderal-federal-privacy-privacy-prain/一下。Jayne Ponder,GAO报告呼吁采用联邦隐私法,ISCE PRIVACY(2019年2月24日),https://www.insideprivacy.com/data-privacy/gao-report-calls-fort-calls-for-for-for-forderal-federal-privacy-privacy-prain/一下。
临床 - 加拿大牙科协会
20 世纪 80 年代中期,数字射线照相术 (DR) 首次应用于牙科,但许多牙医一直不愿意采用这项新技术。早期设备的许多缺点已经得到解决:图像接收器的体积减小,图像分辨率提高,计算机技术的进步带来了更高的处理速度和更好的数据存储和归档解决方案。关于 DR 设备的信息可从许多来源获得,包括牙科期刊、互联网和销售代表。但是,关于购买决策的实际方面的信息很少。虽然大多数牙医都同意 DR 比基于胶片的系统具有许多明显的优势,但许多人不愿意进行更改,因为他们不确定在转换期间会发生什么以及他们可能遇到什么类型的问题。

NIST 关于阈值和隐私增强加密的项目
图注:BC = 块密码。CC = 电路复杂度。Crypto = 密码术。DS = 数字签名。EC = 椭圆曲线。FIPS = 联邦信息处理标准。IR = 内部或机构间(分别表示公共 NIST 报告是在 NIST 内部或在机构间合作中开发的。IRB = 可互操作随机信标。KM = 密钥管理。MPTC = 多方门限加密。LWC = 轻量加密。PEC = 隐私增强加密。PQC = 后量子加密。RNG = 随机数生成。 SP 800 = 计算机安全特别出版物。
SENSYLINK微电子(CHT8310)低压数字...
1.1 寄存器映射(注 3) ...................................................................................................................................... 12 1.1.1 温度测量数据 .............................................................................................................................. 12 1.1.2 相对湿度测量数据 ............................................................................................................................ 14 1.1.3 配置寄存器 ................................................................................................................................ 14 1.1.4 转换设置寄存器 ............................................................................................................................. 16 1.1.5 温度和湿度的高/低限警报设置 ............................................................................................................. 16 1.1.6 单次寄存器 ................................................................................................................................ 16 1.1.7 制造商 ID ................................................................................................................................ 16 1.2 警报输出 ............................................................................................................................................. 16 1.2.1 中断模式(ATM = 0) ................................................................................................................ 17 1.2.2 比较器模式(ATM = 1) ................................................................................................................ 17 1.3 DOM 测量程序 ................................................................................................................................ 18 1.3.1 步骤 1,通过 Config、Conv_Rate 寄存器设置传感器工作模式 ................................................ 18 1.3.2 步骤 2,读取温度和/或湿度测量数据 ................................................................................ 18 1.4 数字接口 ............................................................................................................................................. 18 1.4.1 从机地址 ............................................................................................................................. 18 1.4.2 超时 ............................................................................................................................................. 18 1.4.3 SMBus 警报响应地址(ARA) ............................................................................................. 18 1.4.4 广播呼叫 ............................................................................................................................. 19 1.4.5 高速模式 ............................................................................................................................. 19 1.4.6 PEC ........................................................................................................................................................... 19 1.4.7 读/写操作 ...................................................................................................................... 20

SENSYLINK微电子(CHT8305C)数字...
1.1 寄存器映射 ................................................................................................................................................ 11 1.1.1 温度测量数据 [Add:0x00] .......................................................................................................... 11 1.1.2 相对湿度测量数据 [Add:0x01] ........................................................................................................ 11 1.1.3 配置寄存器 [Add: 0x02] ...................................................................................................................... 12 1.1.4 警报上限设置 [Add: 0x03] ............................................................................................................. 13 1.1.5 制造商 ID [Add: 0xFE] ...................................................................................................................... 14 1.1.6 版本 ID [0xFF] ................................................................................................................................ 14 1.2 S OFT R ESET ............................................................................................................................................. 14 1.3 H EATER ............................................................................................................................................. 15 1.4 DOM 测量 P程序................................................................................................................................ 15 1.4.1 步骤 1,设置传感器 ...................................................................................................................... 15 1.4.2 步骤 2,触发温度和/或湿度测量 ................................................................................................ 15 1.4.3 步骤 3,等待转换时间 ................................................................................................................ 15 1.4.4 步骤 4,读取温度和/或湿度测量数据 ...................................................................................... 15 1.4.5 读取温度和湿度数据的 C++ 代码示例 ...................................................................................... 15 1.5 数字接口............................................................................................................................................. 17 1.5.1 从机地址 ................................................................................................................................ 17 1.5.2 读/写操作 ................................................................................................................................ 17 1.6 警报输出 ............................................................................................................................................. 19

RF DAC 的 INL 与 ACPR 之间的关系
I. 引言 数字射频发射器因其相对于模拟发射器的众多优势而广受欢迎 [1]、[2]、[3]、[4]、[5]、[6]、[7]、[8]、[9]。数字发射器 (TX) 省去了大部分模拟功能,只包含一个模拟端口,即其输出。当然,这种方法依赖于高速、高线性度的数模转换器 (DAC)。DAC 的输出稳定时间必须与载波频率相称,其线性度由所需信号的可容忍失真和/或相邻信道功率比 (ACPR) 决定。后者在长期演进 (LTE) 标准等蜂窝应用中尤其具有挑战性。DAC 的非线性和无杂散动态范围 (SFDR) 已得到广泛研究 [10]、[11]、[12]、[13]、[14]、[15]。本文重点讨论 DAC 非线性和 ACPR 之间的关系。目的是提供简洁的方程,帮助设计人员决定如何选择 DAC 单元,以及在应用预失真等校正技术后可以容忍多少残余积分非线性 (INL)。第二部分涉及电流控制 DAC 的非线性分析,第三部分将其 INL 与 ACPR 联系起来。第四部分研究了当输入近似为白噪声时这些 DAC 的行为,第五部分研究了相位失真的影响。第六部分重复了开关模式架构的计算。
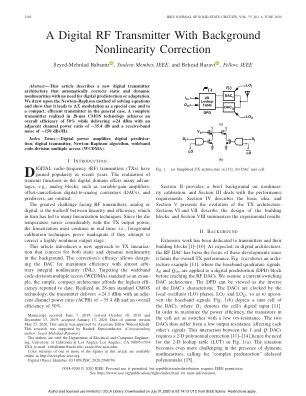
具有背景非线性校正的数字射频发射机
I. 引言 近年来,数字射频 (RF) 发射器 (TX) 越来越受欢迎。在数字域中实现发射功能有许多优势,例如,可以省去模拟模块,如可变增益放大器、失调消除数模转换器 (DAC) 和预驱动器。RF 发射器(无论是模拟还是数字)面临的最大挑战是线性度和效率之间的权衡,这反过来又导致了许多线性化技术的出现。由于芯片温度会随 TX 输出功率而有很大变化,因此必须实时继续线性化;也就是说,如果前台校准技术试图校正高度非线性的输出级,则它们会被证明是不够的。本文介绍了一种新的 TX 线性化方法,可在后台校正静态和动态非线性。校正的有效性允许设计 DAC 以实现具有几乎任意积分非线性 (INL) 的最大效率。以宽带码分多址 (WCDMA) 标准为例,简单、紧凑的架构提供了迄今为止报告的最高效率。该发射器采用 28 纳米标准 CMOS 技术实现,可提供 + 24.1 dBm 的功率,相邻信道功率比 (ACPR) 为 − 35.4 dB,总效率为 50%。

数字化造船厂的机遇与挑战
图 1:生产的横向和纵向整合 ...................................................................................................... 1 图 2:数字船厂价值链愿景 ...................................................................................................... 2 图 3:造船流程 ........................................................................................................................ 3 图 4:从手动结构作业到机器人结构作业的转变 ............................................................................. 4 图 5:从手动检查到检查机器人的转变 ............................................................................. 5 图 6:从手动到 AGV 叉车的转变 ............................................................................................. 6 图 7:从金属部件制造到金属 3D 打印的转变 ............................................................................................. 8 F图 8:从纸质到数字化工作订单的转变 ...................................................................................... 9 图 9:智能制造环境中数据可视化的示例 ...................................................................................... 10 图 10:使用数字孪生和人工智能技术的模拟场景 ...................................................................... 11 图 11:从手动到自主进度更新的转变 ...................................................................................... 11 图 12:机械空间的 AR 和 VR 视图 ...................................................................................................... 12 图 13:客户 - 供应商关系中的知识和知识产权管理 .............................................................................................