XiaoMi-AI文件搜索系统
World File Search Systemivarian
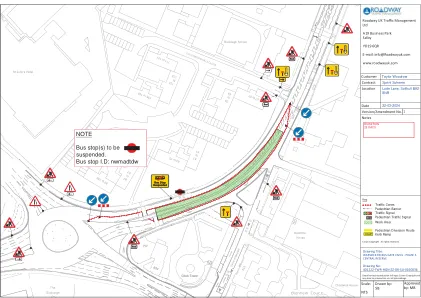
Lode Lane计划
hŗāwhenrigʹrigriěābanāvidteburāmpl moreʹbanāvidteʹivarianʹrigėŝ当whhen laskenthenƌŋd了ƌŋƌŋƌť ‵