XiaoMi-AI文件搜索系统
World File Search Systemjacobian

迪亚巴特方法测定同质异形体自由能 - UCL Discovery
晶格切换蒙特卡罗和相关的 diabat 方法已成为计算同质异形体之间自由能差异的有效而准确的方法。在这项工作中,我们引入了从一种分子晶体中的参考位置和位移到另一种分子晶体中的位置和位移的一对一映射。映射的两个特点有助于使用晶格切换蒙特卡罗和相关的 diabat 方法计算同质异形体自由能差异。首先,映射是单一的,因此其雅可比矩阵不会使自由能计算复杂化。其次,对于任意复杂度的分子晶体,映射都很容易实现。我们通过计算苯和卡马西平同质异形体之间的自由能差异来证明映射。热力学循环的自由能计算,每个循环都涉及三个独立计算的同质异形体自由能差异,都以高精度返回到起始自由能。因此,这些计算提供了方法的力场独立验证,并使我们能够估计单个自由能差异的精度。
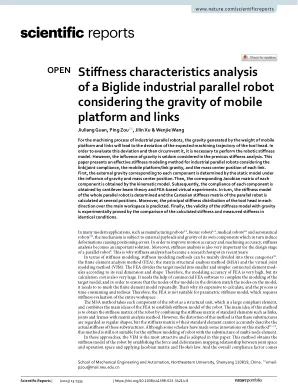
考虑到移动平台的重力和链接
对于工业并行机器人的加工过程,移动平台和链接产生的重力将导致工具头预期的加工轨迹的偏差。为了评估此偏差并绕过它,有必要执行机器人刚度模型。但是,在先前的刚度分析中很少考虑重力的影响。考虑到链接/关节合规性,移动平台/链路重力以及每个链接的质量中心位置,本文为工业并行机器人提供了一种有效的刚度建模方法。首先,与每个组件相对应的外部重力由重力和质量中心位置的影响下的静态模型确定。然后,通过运动学模型获得了每个组件的相应Jacobian矩阵。随后,通过悬臂梁理论和基于FEA的虚拟实验获得了每个组件的遵从性。依次确定整个平行机器人的刚度模型,并在几个位置计算平行机器人的笛卡尔刚度矩阵。此外,可以预测工具头在每个方向上的主要刚度分布。最后,通过比较计算出的刚度和在相同条件下测量的刚度的比较来证明具有重力的刚度模型的有效性。

ekf – sindy -iris re.public@polimi.it
可以通过Kalman过滤器将动态系统中的测量数据吸收到预测模型中。Kalman滤光片的非线性扩展,例如扩展的Kalman滤波器(EKF),以实现(可能是非线性)系统动力学和输入参数的关节估计。要构建在EKF的预测阶段中使用的进化模型,我们建议依靠非线性动力学(Sindy)的稀疏识别。sindy使能够直接从初步获得的数据中识别进化模型,从而避免由于错误的假设和系统动力学的不正确建模而导致可能的偏差。此外,与基于有限元素相比,Sindy模型的数值集成与替代策略相比,可以节省大量计算。最后,辛迪允许立即定义EKF所需的Jacobian矩阵,以识别系统动力学和属性,这是通常与物理模型非常相关的推导。结果,将EKF与Sindy结合起来,为识别非线性系统提供了数据驱动的计算效率,易于应用的方法,即使在Sindy的培训范围之内,也能够稳健地操作。为了证明该方法的潜力,我们解决了一个线性非自主系统的识别,该系统由真实的地震图激发的剪切构建模型以及部分观察到的非线性系统的识别。挑战
5-syllabus-1700469682.pdf
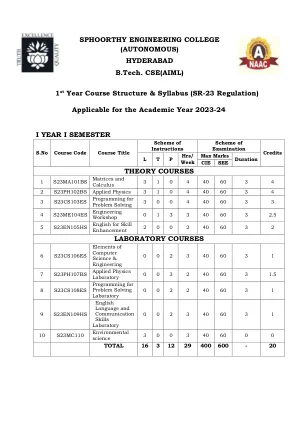
单位 - I:通过梯形形式和正常形式的矩阵矩阵等级,高斯 - 约旦方法的非单个矩阵倒数,线性方程系统:求解高斯消除方法的均匀和非均匀方程的系统,高斯·塞德尔迭代方法。UNIT - II: Eigen values and Eigen vectors Linear Transformation and Orthogonal Transformation: Eigen values, Eigenvectors and their properties, Diagonalization of a matrix, Cayley-Hamilton Theorem (without proof), finding inverse and power of a matrix by Cayley -Hamilton Theorem, Quadratic forms and Nature of the Quadratic Forms, Reduction of Quadratic form通过正交转换为规范形式。单元-III:微积分平均值定理:Rolle的定理,Lagrange的平均值定理,其几何解释和应用,Cauchy的平均值定理,Taylor的系列。确定积分的应用在评估曲线旋转的表面区域和体积(仅在笛卡尔坐标中),不当积分的定义:beta和伽马功能及其应用。单位-IV:多变量计算(部分分化和应用)的定义极限和连续性。部分区分:Euler的定理,总导数,Jacobian,功能依赖性和独立性。应用程序:

脑肿瘤序列配准挑战:建立弥漫性胶质瘤患者术前和随访 MRI 扫描之间的对应关系
摘要 — 由于组织外观的变化,包含病理的纵向脑磁共振成像 (MRI) 扫描的配准具有挑战性,这仍然是一个未解决的问题。本文介绍了第一个脑肿瘤序列配准 (BraTS-Reg) 挑战,重点是估计同一患者被诊断为脑弥漫性胶质瘤的术前和随访扫描之间的对应关系。BraTS-Reg 挑战旨在为可变形配准算法建立一个公共基准环境。相关数据集包括去识别化的多机构多参数 MRI (mpMRI) 数据,根据通用解剖模板针对每次扫描的大小和分辨率进行整理。临床专家已经对扫描中的标志点生成了大量注释,描述了时间域内不同的解剖位置。训练数据以及这些基本事实注释将发布给参赛者,以设计和开发他们的注册算法,而验证和测试数据的注释将由组织者保留,并用于评估参赛者的容器化算法。每个提交的算法都将使用几个指标进行定量评估,例如中位数绝对误差 (MAE)、稳健性和雅可比行列式。

研究实习计划
同时,企业和家庭约 40% 的电力消耗用于供暖和空调。此外,电动力学和热动力学存在很大差异,与电相比,热惯性提供了一种自然储存形式。很少有研究研究电和热的组合模型。值得注意的例子包括 [3] 和 [4] 等一系列作品,它们引入了能源枢纽的概念。每个能源枢纽都包含三个基本元素:连接、电源转换器和存储。该框架通过非线性方程组为能源枢纽和相关的电力和热分配网络开发模型。其他研究,如 [5] 和 [6](重点关注火车站),提出了对这些组合网络的分析。这些分析分阶段进行,首先分别评估电力和热能流,然后一起评估,形成高阶组合状态向量。然后将一般系统线性化(如 [7] 中所述),并使用牛顿-拉夫森算法通过其雅可比矩阵的时间解进行分析。最近,[8] 开发了一种组合模型和分析,有助于计算最优潮流,以在遵守潮流约束的同时最大限度地降低系统成本和损失。

考试问题机器人技术和人工智能
1。控制系统设计。控制系统和系统配置的基本组件。2。系统的标准数学模型:输入输出模型,状态空间模型。3。动态系统线性化,并评估雅各布基质。4。框图转换:系列,并行和反馈连接。5。系统的结构特性:可控性和可观察性。6。一阶和二阶系统:传输功能,步骤响应,冲动响应。7。连续时间系统的稳定性:定义,S-平面根位置,Routh-Hurwitz稳定性标准。8。Lyapunov确定连续时间系统稳定性的方法。9。Nyquist稳定性标准。时间延迟系统的稳定性。10。系统的性能特征(规格):过冲,沉降时间,稳态误差,相对稳定性,阻尼比。11。稳态准确性。具有不同类型编号(集成数)的Unity反馈控制系统中的稳态错误。12。标准特征多项式:Butterworth多项式,二项式多项式。13。通过模态控制(POL放置)对线性系统的稳定。 14。 连续时间系统(Luenberger观察者)的全顺序和降低状态观察者。通过模态控制(POL放置)对线性系统的稳定。14。连续时间系统(Luenberger观察者)的全顺序和降低状态观察者。

在扩散模型中探索低维子空间的可控图像编辑
最近,扩散模型已成为强大的生成模型类别。尽管他们成功,但对他们的语义空间的理解仍然有限。这使得在没有其他培训的情况下,获得精确且脱节的图像生成,尤其是以无监督的方式而挑战。在这项工作中,我们从有趣的观察中提高了对它们的语义空间的理解:在一定范围的噪声水平中,(1)扩散模型中学习的后均值预测指标(PMP)是局部线性的,(2)其Jacobian的单数矢量位于其低度语义语义下集中。我们提供了坚实的理论基础,以证明PMP中的线性和低级别的合理性。这些见解使我们能够提出一种无监督的,单步的,无训练的LO W-rank Co n-trollable图像编辑(LOCO编辑)方法,用于在扩散模型中精确局部编辑。LOCO编辑确定了具有良好属性的编辑说明:同质性,可传递性,合成性和线性性。Loco编辑的这些属性从低维语义子空间中受益匪浅。我们的方法可以进一步扩展到各种文本到图像扩散模型(T-Loco Edit)中的无监督或文本监督编辑。最后,广泛的经验实验证明了Loco编辑的有效和效率。可以在项目网站上找到代码和ARXIV版本。1

16-848 2024年4月10日的参考列表
16-848 2024年4月10日的参考列表开始,我们开始谈论接触模型 - 尤其是硬手指和软手指与库仑摩擦的接触。这些在GRASP分析文献中非常受欢迎,但它们是点接触模型 - 他们假设机器人在一个点与对象进行接触。我们不仅知道,对于人的手接触经常发生在很大的区域上,而且单点接触也会在预测的接触力中造成不连续性,因为在边缘跨越边缘的接触幻灯片,而实际上,这种力可能会差异很顺利。可以通过有限元技术很好地模拟区域接触。但是,这些技术仍然很慢,并且不广泛用于GRASP优化和计划。存在多个基于区域的联系模型。我们快速研究了此博客中描述的其中一种 - 水力弹性联系人:https://medium.com/toyotaresearch/rethinking-contact-simulation-for-robot-manipulation--434a56b5ec88,我们随后进行了一些数学来抓取抓手和jacobian,包括jacobian。我使用了本文的后半部分进行参考。本文还包含一个质量指标 - 考虑到机器人手的运动学结构(在这种情况下为人类手),以及需要完成的一组特定任务。li,Ying,Jiaxin L. Fu和Nancy S. Pollard。“使用形状匹配和基于任务的修剪的数据驱动的掌握合成。”IEEE可视化交易和计算机图形13,no。“抓握”。法拉利,卡洛和约翰·坎尼。2290-2295。4(2007):732-747。 https://ieeexplore.ieee.org/abstract/document/4293017您可以在此条目中找到有关关键术语,形成闭合,抓取矩阵和其他基本属性等关键术语的非常清晰的讨论,来自Springer of Robotics:Prattichizzo,Domenico,Domenico,和Jeffrey C. Trinke。 机器人技术手册(2016):955-988。 https://link.springer.com/chapter/10.1007/978-3-319-32552-1_38我们随后谈论了更多关于使掌握好的的事情 - 很多事情都可以介入! 最引人注目,最常用的质量指标之一是法拉利和精美的掌握质量指标(扳手太空球)。 “计划最佳掌握”。 机器人技术和自动化,1992年。 诉讼。,1992年IEEE国际会议,第 IEEE,1992。https://people.eecs.berkeley.edu/~jfc/papers/92/fcicra92.pdf4(2007):732-747。 https://ieeexplore.ieee.org/abstract/document/4293017您可以在此条目中找到有关关键术语,形成闭合,抓取矩阵和其他基本属性等关键术语的非常清晰的讨论,来自Springer of Robotics:Prattichizzo,Domenico,Domenico,和Jeffrey C. Trinke。机器人技术手册(2016):955-988。 https://link.springer.com/chapter/10.1007/978-3-319-32552-1_38我们随后谈论了更多关于使掌握好的的事情 - 很多事情都可以介入!最引人注目,最常用的质量指标之一是法拉利和精美的掌握质量指标(扳手太空球)。“计划最佳掌握”。机器人技术和自动化,1992年。诉讼。,1992年IEEE国际会议,第IEEE,1992。https://people.eecs.berkeley.edu/~jfc/papers/92/fcicra92.pdf
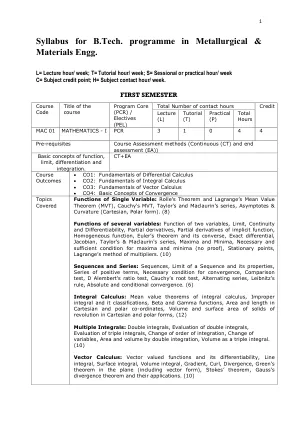
B.Tech的教学大纲。冶金和材料工程的程序。
单个变量的函数:Rolle的定理和Lagrange的平均值定理(MVT),Cauchy的MVT,Taylor's和Maclaurin的系列,Asymptotes&Curvature(Cartesian,Polar,极性形式)。(8) Functions of several variables: Function of two variables, Limit, Continuity and Differentiability, Partial derivatives, Partial derivatives of implicit function, Homogeneous function, Euler's theorem and its converse, Exact differential, Jacobian, Taylor's & Maclaurin's series, Maxima and Minima, Necessary and sufficient condition for maxima and minima (no proof), Stationary points, Lagrange's乘数的方法。(10)序列和序列:序列,序列的限制及其性质,一系列积极术语,收敛的必要条件,比较测试,D Alembert的比率测试,Cauchy的根测试,交替的序列,Leibnitz的规则,绝对和条件收敛。(6)积分计算:积分计算的平均值定理,不正确的积分及IT分类,beta和γ功能,在皇家和极地坐标,伦理固体的体积和表面积,皇家和极地的体积和表面积的面积和长度通过双重整合的体积,体积作为三个积分。(10)矢量计算:矢量值及其不同,线路积分,表面积分,体积积分,梯度,卷曲,弯曲,散射,格林定理(包括向量形式),Stokes的定理,Gauss的Divergence定理及其应用。(10)