XiaoMi-AI文件搜索系统
World File Search Systemkau

硕士论文提案(AM 中的 AI)- UAB KaU 2020
背景和目标 激光粉末床熔合 (LPBF) 被广泛认为是金属合金增材制造 (AM) 领域最有前途的制造工艺之一。AM 提供的设计自由度和复杂性是独一无二的,并且非常有益,尤其是对于工具应用而言。由于创新的 AM 设计解决方案,现在可以大大缩短工艺周期并提高零件质量。尽管有上述好处,但在大型复杂的制造任务中,LPBF 工艺容易出现缺陷和工艺稳定性相关问题。此类故障一旦发生,会严重影响所生产材料的质量和工艺的整体前景。因此,利用可监控工艺及其偏差的手段非常重要。如今,提供 LPBF 工艺现场监测功能的系统已在商业上存在,尽管其在后处理能力和数据评估方面的成熟度仍然有限。本研究的目的是研究并可能开发一个基于机器学习 (ML) 算法的框架,该框架可以对为 LPBF 工艺开发的现场监测系统生成的原始数据进行后处理。感兴趣的监测系统主要是光学断层扫描 (OT) 和熔池 (MP) 分析。这项工作的重点是识别和实施基于图像分析的学习模型,该模型可以关联来自监测系统的输入,以便记录和聚类潜在的材料和工艺异常。
kau - 教育 - 增加学费,特殊费用,考试费和国际学生的所有学术课程的新BA
内部补充检查费(每篇论文)UG/ PG 255重新检查/重复考试费(每张纸)UG/ PG 770重估申请(每篇论文)UG 840在整个学习过程中,只能收集一次入学费和所有学术课程的大学警告存款。每年将收集Kalpadhenu杂志的订阅。在这种情况下,按照第619和621 ST执行委员会会议的决定,特此制裁符合上述大学定期学术课程的上述费用结构,如上所述。与第618 EC的决定相吻合,每年将在上述费用结构中增加费用5%。增强率将仅适用于2024 - 2025学年第一学期录取的学生。执行委员会的顺序
入学农业课程-2023第五流浪...入学BFSC渔业课程-2024第六轮...
根据入学考试专员出版的喀拉拉邦州等级名单应具有有效的等级。候选人应具有招股说明书第6.2.1条规定的学术资格,以便进入Keam2023。没有在MBBS/ BDS,Ayurveda,Homoeo,Siddha,unani,B.Pharm/ Fercriculture/ veterinary/ veterinary/ Forestriny/ Fisorry/ Fisheries/ Co-Opoperation&Banking&Banking&Bank Actripation&Alligation Chrigation和环境科学科学和B.Tech Biotechnology(KAU)课程(KAU)中的候选人(KAU/ INDIAS MUTOROT)。未分配在MBB/ BDS,Ayurveda,Homoeo,Siddha,Unani,B.Pharm/ Farmulture/ Vetricary/ Veterinary/ Forestrileny/ Forestry/ Fisheries/ Co-Operation&Banking&Banking&Banking和环境变化与环境科学和B.Tech Biotechnology(KAU)课程(KAU)课程(KAU)课程的情况下,候选人。 那些已经在全印度流浪空缺咨询中分配/录取的候选人,尽管他们的名字包含在CEE出版的合格候选人名单中,但不符合资格。 应准备好支付规定的费用并介绍所有支持文件,以证明招股说明书中规定的各种资格条件和索赔,同时参加该机构的流浪空缺填充过程。候选人。那些已经在全印度流浪空缺咨询中分配/录取的候选人,尽管他们的名字包含在CEE出版的合格候选人名单中,但不符合资格。应准备好支付规定的费用并介绍所有支持文件,以证明招股说明书中规定的各种资格条件和索赔,同时参加该机构的流浪空缺填充过程。

i/77202/2024 -cee@kerala.gov
根据入学考试专员发布的-2023的KEAM等级列表应具有有效的等级。候选人应具有招股说明书第6.2.1条规定的学术资格,以便进入Keam2023。没有在MBBS/ BDS,Ayurveda,Homoeo,Siddha,unani,B.Pharm/ Fercriculture/ veterinary/ veterinary/ Forestriny/ Fisorry/ Fisheries/ Co-Opoperation&Banking&Banking&Bank Actripation&Alligation Chrigation和环境科学科学和B.Tech Biotechnology(KAU)课程(KAU)中的候选人(KAU/ INDIAS MUTOROT)。未分配在MBB,BDS,Ayurveda,Homoeo,Siddha,Unani课程中,通过全印度/州流浪空缺咨询以及B.Pharm/ Fercricary/ Fertinary/ Fertrinary/ Fortorry/ Fortorry/ Co-Operation/ Co-Operation/ Co-Operation&Banking&Bank Accuern/气候变化和环境科学和IRRESECHING(KAAU)的候选人( 地位。那些已经在全印度流浪空缺咨询中分配/录取的候选人,即使CEE出版的合格候选人名单中包括他们的名字,也不符合资格。应准备好支付规定的费用并介绍所有支持文件,以证明招股说明书中规定的各种资格条件和索赔,同时参加该机构的流浪空缺填充过程。
2025 Spring
每个部门的成绩单在评估论文期的情况下提交成绩单,如果是服务管理专业的情况,在进入学校后需要一年的一年(仅当申请人没有Topik Lv3或更多),就需要一年的Kau Klec的四个学期(一年)(一年)
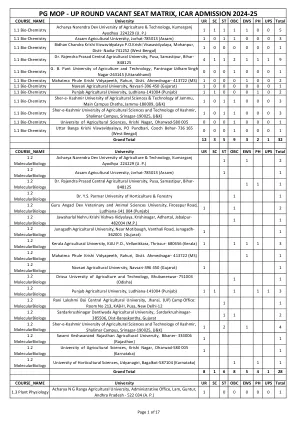
pg拖把 - 圆形空置座椅矩阵,ICAR入学2024-25 course_name University ur sc st obc ews ph ups总计
2.2植物patthology喀拉拉邦农业大学,Kau P.O. 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 IS MAHATOLOGY IS MAHATOLOGY IS,IS 1 1拉胡里(Rahuri),既定。AHMEDNAGAR- 413722 (MS) 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0rtor to be made Universe, Ludiana-141004 (Punjab) 1 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0rtor Vijayarane Krishi toAHMEDNAGAR- 413722 (MS) 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0rtor to be made Universe, Ludiana-141004 (Punjab) 1 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0rtor Vijayarane Krishi to
B.Sc.-M.Sc. (综合)微生物学 通知号KAUEDU/897/2024-EDU ... 座椅矩阵预留
B.Sc.-M.Sc.(综合)喀拉拉邦农业大学提供的微生物学课程是一项综合计划,可为学生提供对微生物学及其在各个部门的应用的深刻了解。强烈关注农业和与环境相关的研究,该计划为学生提供了为可持续农业,环境管理,生物技术,人类健康和其他行业做出贡献所需的知识和技能。通过从本科到研究生学习的无缝发展,学生接受了微生物遗传学,生态学,生物技术和发病机理的专门培训。该计划强调以研究为导向的学习,为学生提供了很多从事实际研究活动的机会。该计划的毕业生和全面的微生物学家,准备应对该行业的挑战并为科学进步做出重大贡献。 选择B.Sc.-M.Sc. (综合)KAU的微生物学课程,学生们在迷人的微生物学领域中踏上了学术卓越和职业机会的旅程。 2。 课程目标该计划的毕业生和全面的微生物学家,准备应对该行业的挑战并为科学进步做出重大贡献。选择B.Sc.-M.Sc.(综合)KAU的微生物学课程,学生们在迷人的微生物学领域中踏上了学术卓越和职业机会的旅程。2。课程目标


口头提交:11 月 22 日和 25 日 - 附加文件
8. 到目前为止,加速设计过程缺乏有意义的利益相关者和公众参与。9. 协商方案是二元对立的:(a)两个“新桥”或“无桥”方案,侧重于开放空间的数量而不是质量;(b)过度商业化旨在成为“城市跳动的心脏”,拆除迈克尔·福勒中心会削弱 Te Ngākau 的市民和文化功能。我们支持:1. 重视与 mana whenua 一起开发的流程和响应,但要更多地考虑空间质量和舒适度;2. 打算在惠灵顿城市景观中引入更多树木和自然环境参考。同样,打算改善 Te Ngākau 内的景观响应,但要以更响应市民活动和舒适度的方式;3. 适当规模的建筑来定义和激活该区域的东北角。我们认为,方案 3 中所示的十一层建筑过高,会给空间投下深深的阴影。 4. 在 MOB/CAB 工地上建造一栋规模和用途合适的新建筑。这栋新建筑将成为从城市通往 Te Ngākau 的门户,并激活、活跃和定义该区域的开放空间。我们要求:1. 理事会重新考虑这些方案,并探索替代方法,包括对背景区域范围发展计划草案中描述的一些方法进行排列组合。2. 制定一个保留城海大桥的现实选择。3. 鉴于该项目的公共重要性,在流程的每个阶段,应提高各选项的可见性,并让公众对决策发表意见。这种透明度和结果的稳健性依赖于及时和稳健的利益相关者和参与式设计流程,包括:• 潜在的公民参考小组和/或公共研讨会/讲习班,以评论方向和价值观并提供反馈; • 一个广泛的专业专家参考小组,用于审查,并作为设计机会和方法的独立意见来源。 4. 加强与公共海滨的关系,以增强海滨公共领域并提供必要的连接。我们还请求有机会作为一个团体向理事会提交报告。