XiaoMi-AI文件搜索系统
World File Search Systemkinematics

物理学学士学位 (02133203)
SI 单位。有效数字。波:强度、叠加、干涉、驻波、共振、拍频、多普勒。几何光学:反射、折射、镜子、薄透镜、仪器。物理光学:杨氏干涉、相干性、衍射、偏振。流体静力学和动力学:密度、压力、阿基米德原理、连续性、伯努利。热:温度、比热、膨胀、热传递。矢量。点的运动学:相对运动、抛射运动和圆周运动。动力学:牛顿定律、摩擦力。功:点质量、气体(理想气体定律)、引力、弹簧、功率。动能:保守力、引力、弹簧。能量守恒。动量守恒。冲量和碰撞。粒子系统:质心、牛顿定律。旋转:扭矩、角动量守恒、平衡、重心。

追寻难以捉摸的传感器管理器 - Zenodo
举例来说,假设一架战术飞机在敌方领空上空飞行,并携带有主动雷达和被动电子监视措施 (ESM) 系统。假设这架飞机的统一轨迹图显示,被跟踪的五个物体中有两个正在迅速接近,可能构成严重威胁,但尚未识别(见图 1)。ESM 系统提供比雷达更好的 ID,而雷达提供更好的空间定位。在攻击任一物体之前,必须先完善这两个物体的 ID 和运动学数据。然而,这两个传感器不能同时使用,因为雷达发射会干扰 ESM 的接收频谱。使问题进一步复杂化的是,迫切需要搜索附近的区域,任务预简报显示该区域存在致命的地面威胁。
追寻难以捉摸的传感器管理器 - Zenodo
举例来说,假设一架战术飞机在敌方领空上空飞行,携带有主动雷达和被动电子监视测量 (ESM) 系统。假设这架飞机的统一轨迹图显示,被跟踪的五个物体中有两个正在快速接近,可能构成严重威胁,但尚未被识别(见图 1)。ESM 系统提供比雷达更好的 ID,而雷达提供更好的空间定位。在攻击任一物体之前,必须完善这两个物体的 ID 和运动学。但是,这两个传感器不能同时使用,因为雷达发射会干扰 ESM 的接收频谱。让问题进一步复杂化的是,迫切需要搜索附近的区域,任务预简报显示该区域存在致命的地面威胁。
追寻难以捉摸的传感器管理器 - Zenodo
举例来说,假设一架战术飞机在敌方领空上空飞行,并携带有主动雷达和被动电子监视措施 (ESM) 系统。假设这架飞机的统一轨迹图显示,被跟踪的五个物体中有两个正在迅速接近,可能构成严重威胁,但尚未识别(见图 1)。ESM 系统提供比雷达更好的 ID,而雷达提供更好的空间定位。在攻击任一物体之前,必须先完善这两个物体的 ID 和运动学数据。然而,这两个传感器不能同时使用,因为雷达发射会干扰 ESM 的接收频谱。使问题进一步复杂化的是,迫切需要搜索附近的区域,任务预简报显示该区域存在致命的地面威胁。

SCARA 机器人的电影设计和力分析...
摘要——气动技术在工业中的应用受到广泛青睐,因为它具有广泛的可用性和无污染的流体,因此有可能取代工业中的其他系统。在工业机器人领域,很少设计带有气动伺服电机的机械臂,因为对此的研究很少。该技术是一种带反馈的闭环重复控制系统,使其在工业过程中的实施成为可能。由于气动工业机器人很少,本研究旨在设计一个原型,通过运动学的解析对位置进行精确控制并降低气动系统的非线性随机性,这将为所需应用的气动伺服电机的机械调整提供必要的信息以及对传输模拟的解释。本研究提供了一个完全气动和功能齐全的机器人原型的制造模型,为未来应用于工业机器人的气动控制研究开辟了领域。

机器人技术和智能机器的博士课程
描述:神经形态传感和计算可用于设计机器人的低延迟感知。为了充分利用低延迟和低功率范式,我们旨在设计端到端的尖峰机器人系统,依靠事件驱动的感觉编码,神经形态计算和尖峰运动控制,所有这些都在神经形态硬件[1]上实现。为此,我们计划使用受脑启发的计算原始剂,以有限且嘈杂的资源来生成可靠的行为[2]。我们将基于最近的工作,展示了通过三联尖峰触发的可塑性,基础神经节启发的抑制作用和竞争性竞争力网络[1]的研究,并通过平衡的混乱动力学吸引力来产生稳定的轨迹[3,4]。作为玩具问题,我们将使用ICUB机器人并使用开发的网络进行笔迹。
追寻难以捉摸的传感器管理器 - Zenodo
举例来说,假设一架战术飞机在敌方领空上空飞行,并携带有主动雷达和被动电子监视措施 (ESM) 系统。假设这架飞机的统一轨迹图显示,被跟踪的五个物体中有两个正在迅速接近,可能构成严重威胁,但尚未识别(见图 1)。ESM 系统提供比雷达更好的 ID,而雷达提供更好的空间定位。在攻击任一物体之前,必须先完善这两个物体的 ID 和运动学数据。然而,这两个传感器不能同时使用,因为雷达发射会干扰 ESM 的接收频谱。使问题进一步复杂化的是,迫切需要搜索附近的区域,任务预简报显示该区域存在致命的地面威胁。
追寻难以捉摸的传感器管理器 - Zenodo
举例来说,假设一架战术飞机在敌方领空上空飞行,并携带有主动雷达和被动电子监视措施 (ESM) 系统。假设这架飞机的统一轨迹图显示,被跟踪的五个物体中有两个正在迅速接近,可能构成严重威胁,但尚未识别(见图 1)。ESM 系统提供比雷达更好的 ID,而雷达提供更好的空间定位。在攻击任一物体之前,必须先完善这两个物体的 ID 和运动学数据。然而,这两个传感器不能同时使用,因为雷达发射会干扰 ESM 的接收频谱。使问题进一步复杂化的是,迫切需要搜索附近的区域,任务预简报显示该区域存在致命的地面威胁。

颈背根的硬膜外电刺激恢复了瘫痪的猴子的自愿臂控制
图1。实验框架。(a)在左侧,行为实验平台的示意图。当动物执行机器人覆盖,掌握和拉动任务时,我们测量了施加到机器人接头,全LIMB运动学,肌电图(EMG)活性的3D力,来自手臂和手的八个肌肉,以及来自感觉运动区域的皮层内信号。实验方案的右,概念方案:(1)在控制计算机上运行的解码器确定了运动的尝试,(2)(2)将电脊髓刺激传递到适当的脊髓根。(3)刺激产生了我们在离线记录和分析的手臂和手动运动。(b)任务的示意图。猴子经过训练,可以抓住,掌握并拉出放置在机器人臂末端效应子上的目标对象。我们认为当目标空间阈值在拉动过程中越过时,我们认为运动完整。版权所有JemèreRuby。
机械工业
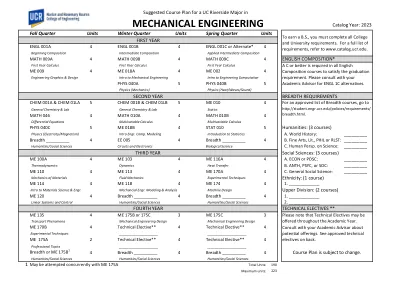
通用机械工程材料与结构 ME 100B:热力学 (4) ME 100B:热力学 (4) ME 116B:传热 (4) ME 116B 传热 (4) ME 117:燃烧与能源系统 (4) ME 121:反馈控制 (4) ME 121:反馈控制 (4) ME 122 振动 (4) ME 122:振动 (4) ME 134:材料的微观结构转变 (4) ME 130:机构的运动学和动态分析 (4) ME 153:有限元方法 (4) ME 131:机构设计 (4) ME 156:材料的机械行为 (4) ME 133:机电一体化简介 (4) ME 157:ME 134:ME 158:ME 136:能源产品对环境的影响与转换 (4) ME 180: 工程中的光学与激光 (4) ME 137: 环境流体力学 (4) *ME 197: 本科生研究 ME 138: 生命系统中的传输现象 (4) ME 140: 船舶理论 (4) ME 144: 设计与制造 ME 145: 机器人规划与运动学 (4) ME 121: 反馈控制 (4) ME 153: 有限元方法 (4) ME 122: 振动 (4) ME 156: 材料的机械行为 (4) ME 130: 机构的运动学和动态分析 (4) ME 157: ME 131: 机构设计 (4) ME 158: ME 133: 机电一体化概论 (4) ME 175D: 技术创业 (4) ME 140: 船舶理论 (4) ME 176 可持续发展产品设计 (4) ME 144:机器人技术简介 (4) ME 180:工程中的光学与激光 (4) ME 145:机器人规划与运动学 (4) *ME 197:本科生研究 ME 153:有限元方法 (4) ME 156:材料机械行为 (4) 能源与环境 ME 175D:技术创业 (4) ME 100B:热力学 (4) ME 176 可持续产品设计 (4) ME 116B:传热 (4) ME 180:工程中的光学与激光 (4) ME 117:燃烧与能源系统 (4) *ME 197:本科生研究 ME 136:能源产品对环境的影响与转换 (4) ME 137:环境流体力学 (4) ME 138:生物系统中的传输现象 (4) *ME 197:本科生研究