XiaoMi-AI文件搜索系统
World File Search Systemkinematics

Robert Kenner、Valentin Gischig、Zan Gojcic、Yvain Quéau、Christian Kienholz 等人。点云在大型斜坡不稳定性中岩石运动学分析的潜力:瑞士阿尔卑斯山的例子:Brinzauls、Pizzo Cengalo 和 Spitze Stei。山体滑坡,2022 年,�10.1007/s10346-022-01852-4�。�hal- 03616418�
摘要 激光雷达测量和无人机摄影测量提供的高分辨率点云非常适合调查斜坡变形。然而,今天这些点云中包含的信息很少得到充分利用。这项研究展示了瑞士的三个大规模斜坡不稳定的例子,出于灾害预防的原因,这些斜坡受到积极监测。我们使用通过地面激光扫描获取的点云来 (1) 识别各个岩石隔室运动行为的差异;(2) 突出显示移动岩体中的活动剪切面;(3) 确定驱动斜坡位移的运动过程;(4) 根据岩石滑坡的 3D 表面运动模拟基底滑动面;(5) 计算精确的位移角;(6) 提供对不稳定岩石体积的估计。这些信息对过程理解做出了重要贡献,从而支持了灾害管理中的决策。

概述步态分析是对协调肌肉功能的定量实验室评估,通常需要专门的设施和员工
与步行期间发生的所有其他同时运动隔离。可以生成单个关节和肢体运动作为步态相的函数的图形图。动力学是用于描述引起或控制运动的因素的术语。评估动力学涉及使用物理学和生物力学原理来解释观察到的运动学模式,并产生描述在正常步态和异常步态分析过程中产生的力的分析。步态分析已被提议作为手术计划的帮助,主要用于脑瘫,也针对其他条件,例如俱乐部。此外,正在研究步态分析作为计划康复策略(即矫形核心器件)的一种手段,以针对与脑瘫,衰老,中风,脊髓损伤等相关的门诊问题。步态分析是对协调肌肉功能的定量评估。对于接受步态疾病手术的脑瘫患者,一项随机对照试验并未发现作为手术计划的一部分接受步态分析的患者的健康结果的改善,而一项非随机对照试验并未发现利用参数的改善。在脑瘫患者和其他疾病患者中进行的几项研究表明,步态分析建议会影响治疗决策,但是这些决定对健康结果的影响尚不清楚。基于临床审查员的投入,步态分析在全面的情况下,对于与脑瘫有关的步态疾病儿童进行手术之前的计划可能是医学上必要的。对于所有其他迹象,由于没有可靠的功效,步态分析在医学上无需在医学上被认为是不需要的。编码Medicare Advantage计划和商业产品以下CPT代码在接受以下诊断代码之前被认为是医学上必要的*:96000通过视频敲击和3D Kinematics 96001通过视频敲击和3D Kinematics通过视频基于计算机的运动分析进行全面的基于计算机的运动分析;步行96002动态表面肌电图,步行或其他功能活动期间的动态足底压力测量,1-12肌肉96003动态细丝肌电图,步行或其他功能活动期间,1 Muscle 96004医师审查和解释全面的基于计算机的运动植物压力测量,动态表面电线,动态电线以及其他功能性的电线,或其他功能性的电线和其他功能性,并进行了动态电线和其他功能。*ICD-10-CM代码:G80.0-G80.9相关策略无发布提供商更新,3月提供商更新,2023年4月提供商更新,2022年6月提供商更新,2021年12月1221年12月提供商更新,2021年1月,参考文献1.Cutti A,Ferrari A,Garofalo P等。“ Outwalk”:基于惯性和磁传感器的临床步态分析方案。Med Biol Eng Comput 2010; 48(1):17-25。2。Vanden noort JC,Ferrari A,Cutti Ag等。通过惯性传感器和磁性传感器患有脑瘫儿童的步态分析。Med Biol Eng Comput 2013; 51(4):377-86。
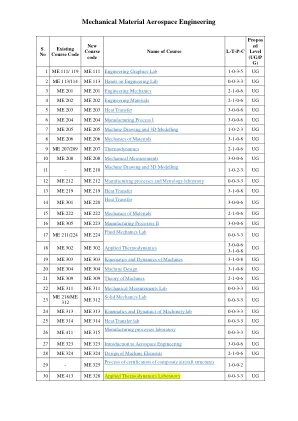
机械材料航空工程
模块5:虚拟工作和能量方法 - 虚拟位移,粒子的虚拟工作原理以及刚体的理想系统,自由度。主动力图,有摩擦的系统,机械效率。保守力和势能(弹性和重力),平衡的能量方程。能量法对平衡的应用。平衡的稳定性。模块6:颗粒动力学 - 颗粒的运动学:直线运动,平面曲线运动 - 矩形坐标,正常和切向坐标,极性坐标,空间曲率 - 圆柱 - 圆柱形,球形(球形(坐标),相对和约束运动。颗粒动力学:力,质量和加速度 - 直线和曲线运动,工作和能量,脉冲和动量 - 线性和角度;影响 - 直接和倾斜。颗粒系统动力学:牛顿的第二定律,工作能源,脉冲弹药,能量的保护,能量和动量模块7:刚体的刚性身体动力学介绍:刚体旋转的方程式,用于在固定轴上旋转固定轴旋转固定轴的固定平面,一般平面运动,旋转平面运动的旋转旋转的旋转旋转的旋转架子旋转的旋转旋转旋转的旋转。coriolis刚体刚体的加速动力学:刚体的运动方程,平面运动中刚体的角动量,刚体的平面运动和D'Alembert的原理,刚体的系统,刚体的系统,限制了平面运动;作用在刚体上的力和作用,平面运动中刚体的动能,刚体的系统,能量保护,刚体的平面运动 - 脉冲和动量,刚体的系统,刚体的系统,保护角动量。

由活性上肢外骨骼的不同水平的透明度引起的人类运动修饰
主动上肢外骨骼是神经恢复的潜在强大工具。该潜力取决于几种基本控制模式,其中一种是透明度。在这种控制模式下,外骨骼必须遵循人类运动而不会改变它,从理论上讲,这意味着无效的相互作用工作。达到透明度的水平高,尽管不完美,既需要一种适当的控制方法,又需要对外骨骼对人类运动的影响进行深入评估。本文基于识别外骨骼动力学的识别,或者是在力反馈控制或结合下引入了三种不同的“透明”控制器的评估。因此,这些控制器可能会通过设计明显诱导不同水平的透明度。进行的调查可以更好地理解人类如何适应一定是不完事的透明控制器。一组14名参与者受到这三个控制者的束缚,同时在副臂平面进行运动。随后的分析是根据相互作用,运动学,肌电图和人体工程学反馈问卷进行的。结果表明,在执行透明的控制器较少的情况下,参与者的策略往往会引起相对较高的相互作用工作,并具有较高的肌肉活动,从而导致运动学指标的敏感性很小。换句话说,截然不同的残留互动工作并不一定会引起非常不同的运动运动学。这样的行为可以通过自然的人类倾向来解释以维护其首选的运动学的努力,应在将来的透明控制器评估中考虑到这一点。

生物医学信号处理和控制
脑电图(EEG)的运动轨迹解码,用于有效控制大脑计算机界面(BCI)系统,一直是研究的活跃领域。这些系统包括假体,康复和增强设备。在这项工作中,在掌握和升力运动过程中使用前移动前的EEG信号估算三维(3D)手运动学。从公开可用数据库Way-eeg-gal中使用的十二个受试者的数据用于此目的。多层感知器(MLP)和基于卷积神经网络长期记忆(CNN-LSTM)的深度学习框架提议利用在实际移动执行之前编码的EEG数据中编码的运动神经信息。使用以七个不同范围过滤的脑电图数据分析频段特征,以分析手动运动学解码。最佳性能频带功能将采用不同的EEG窗口尺寸和滞后窗口进行进一步分析。此外,使用剩余的受试者(LOSO)方法进行了受试者间的手轨迹解码分析。Pearson相关系数以及手轨迹用于评估所提出的神经解码器的解码性能。这项研究探讨了在触及和掌握任务期间使用EEG信号进行主题间3D手轨迹解码的可行性。所提出的CNN-LSTM解码器能够分别在三个轴上达到最高0.730和0.627的大相关性,分别在受试者内和受试者间设置中,从而为实用BCI应用提供了有关从移动前EEG信号中解码手部位置的可行信息。

MSTIC 博士学院 & EDST 博士学院
量化人体运动行为首先要尽可能准确地测量和估计运动学和动力学变量。监测人体运动在功能康复、骨科、运动、辅助机器人或工业人体工程学方面有着广泛的应用。当今的运动捕捉系统通常是指立体摄影测量系统和实验室级测力板,它们准确但价格昂贵,需要专业技能,并且不便携。最近,使用价格实惠的传感器进行人体运动估计,例如惯性测量单元或 RGB 深度相机,已成为众多研究的主题。尽管这些系统在实验室外具有巨大的应用潜力,但它们的准确性仍然有限,主要是由于固有的 IMU 漂移和视觉遮挡,并且关节运动学和动力学估计仍然难以估计。这些缺点可能解释了为什么这种系统很少用于常见的临床应用或家庭康复计划。在此背景下,本论文涉及开发一种新的经济实惠的运动捕捉系统,该系统能够准确估计人体 3D 关节状态。与以前基于视觉或惯性传感器的研究不同,所提出的方法包括结合新设计的视觉惯性传感器的数据。该系统还利用了新的实用校准方法,这些方法不需要任何外部设备,同时仍然非常实惠。所有传感器数据都融合到一个受约束的扩展卡尔曼滤波器中,该滤波器利用人体的生物力学和所研究的任务来显着改善关节状态估计。这是通过结合不同类型的约束(例如关节限制、刚体和软关节约束)以及对关节轨迹的时间演变和/或传感器随机偏差进行建模来实现的。该系统估计精确 3D 关节运动学的能力已通过对上臂和跑步机步态的日常生活活动的各种案例研究得到验证。已经研究了两种具有不同传感器数量和配置的不同原型。与黄金标准运动捕捉系统相比,对几名健康受试者进行的实验显示出非常令人满意的结果。总体而言,两个系统之间的平均 RMS 差异低于 4 度。当使用较少数量的传感器进行步态分析时也是如此。该系统还用于


buğraCoşkun -bcskn.xyz
2021年10月/2021年目前的R&D控制系统设计工程师Profen Communication&Services,Inc。•设计了控制算法,用于飞机SOTM SOTM基座的控制器PCB和嵌入式程序(概念项目)。•写了CTL:使用Beckhoff Plcs的空中跟踪基座的坐标转换库。•写了一篇论文和随附的C程序,用于X-Y基座的单层几何逆运动学。•从事V波段行驶波管研究项目。•在GNU/Linux系统上进行了讲座(总计:8小时)。应用数学 /控制系统< / div>
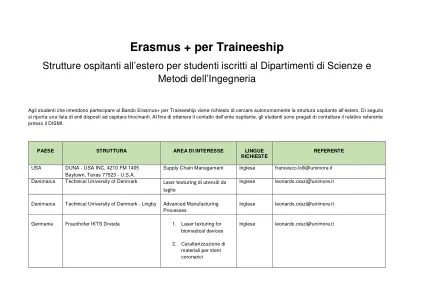
伊拉斯mus +每学员
ROMB Technologies是一家大学衍生公司,该公司开发,集成和商业化自主导航软件。我们的重点是需要高定位准确性和可重复性的应用,例如自动化材料处理。在实习期间,学生将参与自动叉车的控制,感知和用户界面软件的开发和测试。该位置需要计算机编程的知识(C ++和/或Python)。对控制系统,机器人运动学,视觉感知,信号处理,SLAM,ROS或Web开发的知识是一种奖励。该职位适合硕士学生。
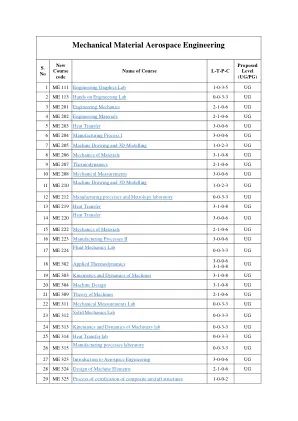
机械材料航空航天工程
模块 5:虚功和能量法- 虚位移、质点虚功原理和理想刚体系统、自由度。主动力图、有摩擦系统、机械效率。保守力和势能(弹性和重力)、平衡能量方程。能量法在平衡中的应用。平衡稳定性。模块 6:粒子动力学- 粒子运动学:直线运动、平面曲线运动 - 直角坐标、法向和切向坐标、极坐标、空间曲线 - 圆柱、球面(坐标)、相对运动和约束运动。粒子动力学:力、质量和加速度 - 直线和曲线运动、功和能量、冲量和动量 - 线性和角向;冲击 - 直接和斜向。粒子系统动力学:广义牛顿第二定律、功、冲量、能量和动量守恒定律 模块 7:刚体动力学简介 平面刚体运动学:刚体绕固定轴旋转的方程、一般平面运动、平面运动中的瞬时旋转中心、粒子相对于旋转框架的平面运动。科里奥利加速度平面刚体动力学:刚体运动方程、平面运动中刚体的角动量、刚体的平面运动和达朗贝尔原理、刚体系统、受限平面运动;作用于刚体上的力的能量和功、平面运动中刚体的动能、刚体系统、能量守恒、刚体的平面运动 - 冲量和动量、刚体系统、角动量守恒。