XiaoMi-AI文件搜索系统
World File Search Systemkinematics
提名 - 竞选选举 - 2025.pdf
制造和成型技术,包括高级处理方法;生产工程;工业工程;精密工程;铸造和铸造技术;焊接和加入;计量学;加工;热科学和工程包括热力学,燃烧,传热,空调和气候控制;固体的设计和分析;热和流体机械系统;机器,结构和设备在内,包括运动学,机械和机器人技术,微型机械系统(MEMS);摩擦学;汽车工程;海军建筑与海洋工程;振动工程,声学和噪声素的动机;固体和流体的实验和计算应力分析; CAD/CAM,CIM;非破坏性评估

MSTIC 博士学院 & EDST 博士学院
量化人体运动行为首先要尽可能准确地测量和估计运动学和动力学变量。监测人体运动在功能康复、骨科、运动、辅助机器人或工业人体工程学中有着广泛的应用。当今的运动捕捉系统通常指立体摄影测量系统和实验室级测力板,它们虽然准确,但价格昂贵、需要专业技能且不便携。最近,使用惯性测量单元或 RGB 深度相机等价格实惠的传感器进行人体运动估计已成为众多研究的主题。尽管这些系统在实验室外具有巨大的应用潜力,但它们的准确性仍然有限,主要是由于固有的 IMU 漂移和视觉遮挡,而且关节运动学和动力学估计仍然难以估计。这些缺点可能解释了为什么这种系统很少用于常见的临床应用或家庭康复计划。在此背景下,本论文致力于开发一种新型、经济实惠的运动捕捉系统,该系统能够准确估计人体的三维关节状态。与以前基于视觉或惯性传感器的研究不同,所提出的方法包括结合新设计的视觉惯性传感器的数据。该系统还利用了新的实用校准方法,这种方法不需要任何外部设备,而且价格非常实惠。所有传感器数据都融合到一个受约束的扩展卡尔曼滤波器中,该滤波器利用人体的生物力学和所研究的任务来显著改善关节状态估计。这是通过结合不同类型的约束来实现的,例如关节限制、刚体和软关节约束,以及对关节轨迹和/或传感器随机偏差的时间演变进行建模。该系统估计精确的三维关节运动学的能力已通过对上臂和跑步机步态的日常生活活动的各种案例研究得到验证。已经研究了两种具有不同传感器数量和配置的不同原型。与黄金标准运动捕捉系统相比,对几名健康受试者进行的实验显示出非常令人满意的结果。总体而言,两个系统之间的平均 RMS 差异低于 4 度。当使用较少数量的传感器进行步态分析时也是如此。该系统还用于动态识别
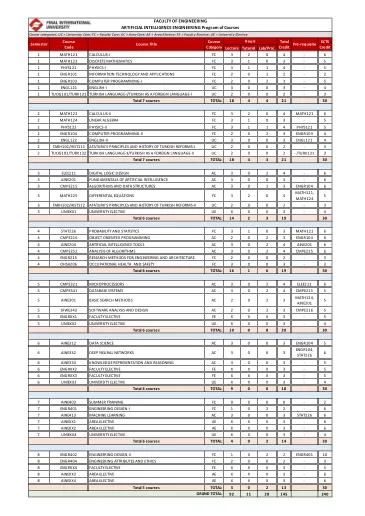
05-Arductor Intelligence Engineering-
该课程的目的是提供基本信息,以帮助学生了解工程中可能的复杂问题。在这方面,教授解决物理问题的基本原理和方法。该课程提供了包括力学在内的基本物理学的基本基础。本课程的基本主题是:单位和维度在一个维度,自由度,矢量数学,二维运动,牛顿运动定律,牛顿法律的应用,自由人体图,循环运动,工作和能量的能量,能量,动力,瞬间,脉动,脉动,冲动,碰撞,旋转kinibr,旋转kinematsick,porqual torque,porqual torque,为了完整性,学生应该进行6个与课程学科有关的实验。

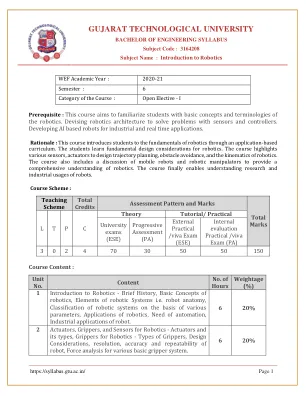
机器人(E019370)
机器人技术是人工智能和算法的快速发展且越来越突出的应用领域。机器人技术建立在高级信息学工具上,以从传感器收集和解释信息,并根据此信息计划和执行操作。本课程的目的是快速概述选定的硬件(例如传感器,执行器和移动计算),以深入研究用于设计和编程自主移动机器人技术的概念和方法。该课程将集中于传感器融合,运动学,动力学,本地化和映射以及机器学习。该课程将通过呈现用例(例如移动机器人,人机交互和生物学启发的机器人)来构架内容。这些理论将在动手实验室工作和机器人项目中应用。


无人机保护事业
AGL 高于地面 AOI 感兴趣区域 ARF 即将起飞 ATC 空中交通管制 BEC 电池消除电路 B-VLOS 超视距 CAA 民航局 CHDK Canon Hack 开发套件 CMOS 互补金属氧化物半导体 CW 顺时针 CCW 逆时针 DSM 数字表面模型 DJI 大疆创新 ESC 电子速度控制器 FL 飞行高度 FLIR 前视红外雷达 FPV 第一人称视角 GIS 地理信息系统 GPS 全球定位系统 GNSS 全球导航卫星系统 IATA 国际航空运输协会 ICAO 国际民用航空组织 KAP 风筝航空摄影 LiDAR 光检测和测距 LiPo 锂聚合物 LRS 远程系统 MP 百万像素 NATS 国家空中交通服务 NDVI 归一化差异植被指数 NGO 非政府组织 NOTAM 飞行员通知 OPTO 光隔离器 OSD 屏幕显示 PfAW 空中作业许可 PNP 即插即用 PPK后处理运动学 RC 无线电控制 RGB 红色、绿色、蓝色 RPAS 遥控飞机系统 RTF 准备飞行 RTH 返回家园 RTK 实时运动学 RTL 返回发射 SfM-MVS 运动结构多视角立体 TLS 地面激光扫描仪 TOW 起飞重量 UAV 无人驾驶飞行器 UTM 无人驾驶飞机系统交通管理 VFR 目视飞行规则 VLOS 视觉视线
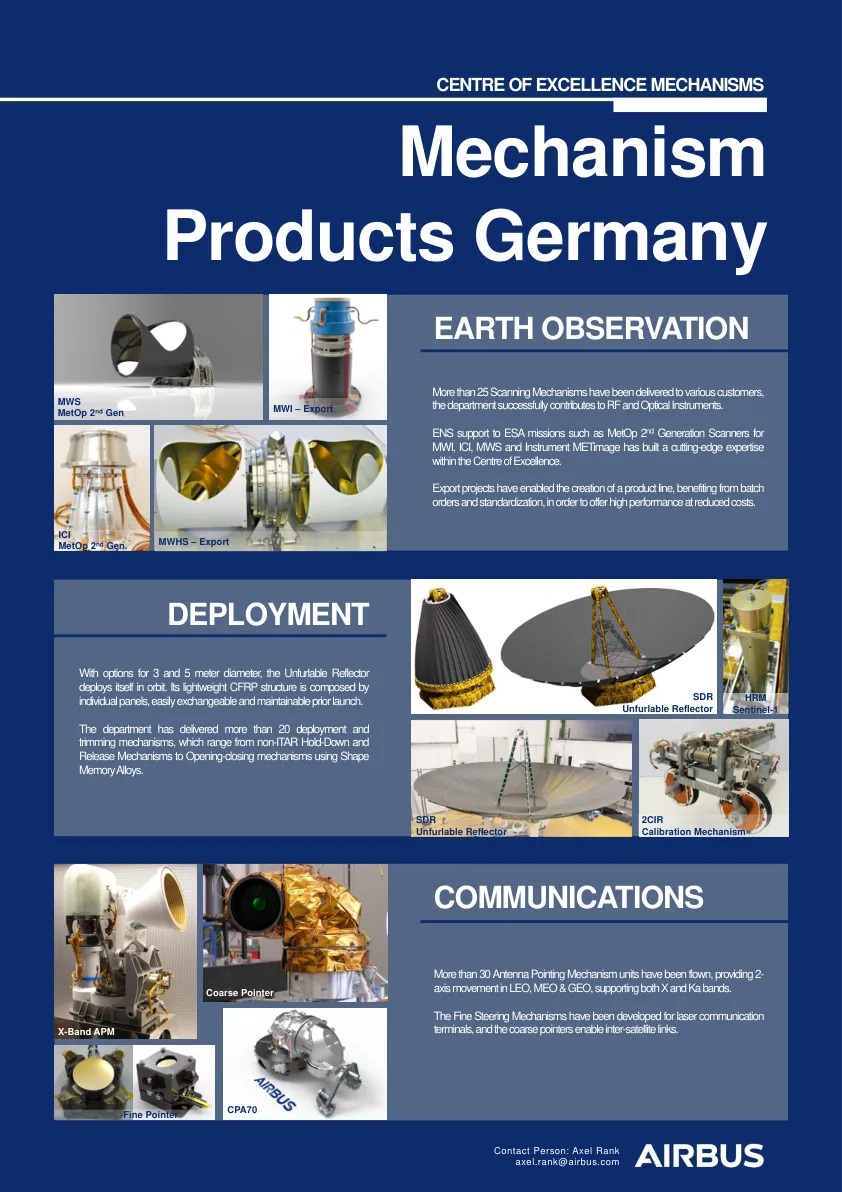
地球观察部署通信
空中客车防御和空间为在苛刻的环境(例如真空或高辐射)中的空间应用和地面应用的设计和开发提供了完整的投资组合。Our portfolio includes: • 3D design and drawing preparation, from initial draft to manufacturing/interface/measurement drawings • Design trade-offs, involving all relevant engineering disciplines and making use of our extensive product and engineering heritage • Selection of mechanism components, such as bearings, motors or sensors • Design of features and complex structures, such as mirror mounts, isostatic mounts, thin structures, large deployable structures or redundancy苛刻应用的概念•覆盖所有机制有关的学科,包括结构/热方面,运动学,机电学,摩擦学
课程大纲EEL 4930:自动机器人弹簧...
本课程的主要目的是学习参与自主机器人和/或智能代理的设计和操作的理论和实验基础。介绍性讨论涵盖了机器人感知,计划和控制的子主题。其他主要主题包括机器人零件设计,感官集成,运动运动学,仿真测试(ROS/ROS2),未建模的环境/社会因素以及现场部署方面。除了标准的地面机器人系统外,我们还将涵盖水下机器人技术和空中机器人技术的类似主题和设计选择。本课程的所有材料和家庭作业都是根据现代机器人技术广泛接受的实践开发的。本课程的预期副作用是增强您的专业知识: