XiaoMi-AI文件搜索系统
World File Search Systemmanual
User Manual - prom.st
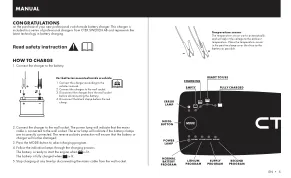
选择安装何处之前,请考虑以下几点:不要将逆变器安装在易燃建筑材料上。安装在固体表面上在眼睛级别安装此逆变器,以便始终读取LCD显示屏。为了适当的空气循环以散热,允许清除约。20厘米到侧,大约在单元上方和下方50厘米。环境温度应在0°C和55°C之间,以确保最佳操作。推荐的安装位置应垂直粘附在墙壁上。请确保保留其他对象和表面,如
R INAG MANUAL - 圣地亚哥市
接头:管道应采用带尼龙扎带的开口接头。安装在接头上的氯丁橡胶海绵垫圈应由管道制造商提供。接头处的最大允许偏转应为 5 度。其他接头系统必须经工程师批准。
Economy Force Sensor Manual CI-6746
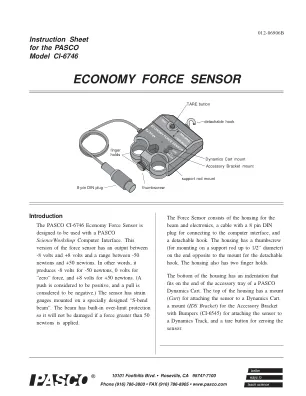
pasco Scientific保证该产品从货运之日起一年内没有材料和工艺缺陷。pasco将根据其选择维修或更换产品的任何部分,这些部分被认为是材料或做工有缺陷的。保修不涵盖由于滥用或使用不当而造成的产品的损害。确定产品故障是由Pasco Scientific制造的,是客户缺陷还是不当使用的结果。保修设备返回的责任属于客户。必须正确装箱设备,以防止损坏和邮寄邮寄或货运预付。(由于保修不当造成的返回设备堆积不当造成的损坏。)维修后返回设备的运输费用将由Pasco Scientific支付。


手动的
2.3.3.1 2年制MBA项目学分分配 15 2.3.3.2 2年制MBA(BA)项目学分分配 15-16 2.3.4 3年制理科硕士项目学分分配 16-17 2.3.5 2年制文学硕士项目学分分配 17 2.3.6 2年制高级工商管理硕士项目学分分配 17-18 2.3.7 3年制高级工商管理硕士项目学分分配 17 MBA 课程 18 2.4 研究生课程结构 18 2.5 学分 18 2.6 模块化课程 18 2.7 常规学期的学业负担 18-19 2.7.1 学业负担要求的例外情况 19 第 3 章 学期和注册 20-24 3.1 学期/学年 20 3.2 学制 20 3.3 学年日历 20 3.4 学期注册 20 3.4.1 预注册 21 3.4.2 预注册(逾期罚款) 21 3.4.3 费用支付 21-22 3.4.4 费用支付(逾期罚款) 22 3.4.5 现场注册/报告 22-23 3.4.6 学期退学/取消学术课程注册
手动
带有“电压保护”的电池,某些锂电池具有车载UVP(电压保护),可断开电池连接,以避免电池变得太深。这禁止充电器检测到电池连接。要绕过这一点,电池充电器需要打开UVP。有两种选项可“唤醒”电池 - 自动和手动。在自动“唤醒”期间,LED将闪烁,直到启动充电程序并用稳定的光线点亮。自动“唤醒”最多可活动5分钟。如果充电器在10分钟后处于待机模式(电源LED正在闪烁),则自动唤醒未成功。尝试手动醒来。要使用手册“唤醒”,请按模式按钮约10秒钟以绕过UVP。在“唤醒”期间,LED将闪烁,直到启动电荷程序并以稳定的灯光点亮。如果手动唤醒不成功,电源LED将在最新10分钟后开始闪烁。断开电池的任何平行负载,然后重试。如果在此之后未启动充电,则可能需要更换电池。
手动
4.21.6.1简单的跳线。。。。。。。。。。。。。。。。。。。。。。。。。。。。。169 4.21.6.2双向(三针)跳线。。。。。。。。。。。。。。。。。。。。169 4.21.7焊接跳线。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。170 4.22逻辑门。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。171 4.22.1美国逻辑大门。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。171 4.22.2 IEEE逻辑门。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。172 4.22.3欧洲逻辑门。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。173 4.22.4路径风格的逻辑端口。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。174 4.22.5美国端口使用情况。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。176 4.22.5.1美国逻辑端口自定义。。。。。。。。。。。。。。。。。。176 4.22.5.2美国逻辑端口锚。。。。。。。。。。。。。。。。。。。。。177 4.22.6 IEEE逻辑门用法。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。179 4.22.6.1堆叠和对齐IEEE标准门。。。。。。。。。。。。。。181 4.22.6.2 IEEE标准端口自定义。。。。。。。。。。。。。。。。。181 4.22.6.3 IEEE标准端口锚。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 183 4.22.6.4传输门符号。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 183 4.22.7欧洲逻辑端口使用情况。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。181 4.22.6.3 IEEE标准端口锚。。。。。。。。。。。。。。。。。。。。。183 4.22.6.4传输门符号。。。。。。。。。。。。。。。。。。。。。。。183 4.22.7欧洲逻辑端口使用情况。。。。。。。。。。。。。。。。。。。。。。。。。。。。184


维修站手册和质量控制手册
为 Boca 飞机维修 (BAM) 制定政策和程序,该维修站将遵循这些政策和程序,以满足 14 CFR §145 的所有要求和公司业务要求。RSM/QCM 未得到 FAA 的明确批准或接受。当 RSM/QCM 符合适用法规的要求时,即视为可接受。RSM/QCM 将由 FAA 审查以确定是否符合法规。每个 RSM/QCM 的内容都在网络级别进行审查和修订。在实施之前,将向 FAA 提供一份培训计划手册的副本,以获得其所需的批准。