XiaoMi-AI文件搜索系统
World File Search Systemmapper

神经网络中非线性潜在结构的动态灵活推理
流形潜在因子和神经观测之间的关系用带有 MLP 编码器和解码器网络的自动编码器 154 建模,其中流形潜在因子是瓶颈 155 表示。从神经观测到流形潜在因子的虚线仅用于 156 推理,不是生成模型的一部分。动态和流形潜在因子共同形成 157 LDM,其中流形因子是动态因子的噪声观测,构成 158 LDM 状态。动态潜在因子的时间演变用线性动态 159 方程描述。所有模型参数(LDM、自动编码器)都是在单次优化中联合学习的,通过最小化未来神经观测与过去的预测误差。在无监督 161 版本中,在训练 DFINE 模型之后,我们使用映射器 MLP 网络来学习 162 流形潜在因子和行为变量之间的映射。我们还扩展到监督式 DFINE,其中映射器 MLP 网络与所有其他模型参数同时进行训练,以达到优化效果,现在可以最小化神经和行为预测误差(方法)。(b)显示了使用 DFINE 的推理过程。我们首先使用每个时间点的非线性流形嵌入来获得流形潜在因子的噪声估计。借助动态方程,我们使用卡尔曼滤波来推断动态潜在因子 𝐱𝐱 𝑡𝑡|𝑘𝑘 并改进我们对流形潜在因子 𝐚𝐚 𝑡𝑡|𝑘𝑘 的估计,下标为

联合机构间实验25-1
ATAK Live Mapper是一个软件系统,可提供地理区域的实时空中图,该地理区域直接从飞行中流到无人机,再到地面战斗机。在JIFX Greensight上,希望测试系统的流和映射功能以及新集成的对象检测网络,以识别和地面上的虚拟现象未爆炸的伪造架(UXO)目标。测试将由当地地面控制系统指示的预先计划的路线组成。图像将直接缝在无人机上,流到轻型PC上,然后转发到ATAK平板电脑。UXO检测将使用实时图像供稿进行,并直接集成到ATAK地图上。Greensight将使用指标,包括图像吞吐量,MAP更新延迟,UXO检测准确性和映射质量来评估任务成功。我们还将邀请其他JIFX参与者评估系统及其有效性。

71042010.pdf - SP 航空
在接下来的许多年里,科学界对此兴奋不已,忙碌不已。其有效载荷之一——月球矿物学测绘仪或 M3——发来的首批数据提供了分子线索,表明月球上可能存在水。现在,另一个有效载荷——Mini-SAR——发来的数据,经过印度和美国科学家联合小组的彻底分析,提供了在北极永久阴影区存在大量水冰沉积物的证据。这一消息于 2010 年 3 月 1 日宣布,随后得到了艾哈迈达巴德物理研究实验室主任 J.N. Goswami 的证实。“这无疑是一个重要发现。我们花了五个月的时间来评估这些发现,因为我们必须说服科学界,”他说。Goswami 是月船一号任务的首席科学研究员。
成像雷达 - NASA 事实 - cloudfront.net
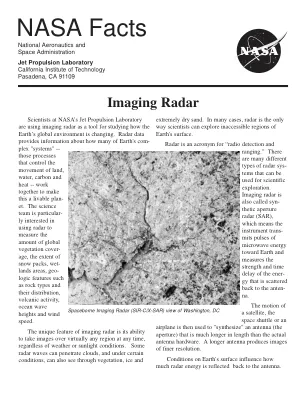
未来任务 SIR-C/X-SAR 第二次飞行在获取重复飞行干涉数据和从这些数据生成高程图方面取得了巨大成功,这促使人们计划进行第三次飞行。美国国家图像和测绘局 (NIMA) 提供资金对 SIR-C 进行改造,增加一个 60 米 (197 英尺) 的吊杆和一个外置天线,操作任务并处理数据,而 NASA 将提供所需的大部分额外资源。这项为期 11 天的任务被称为航天飞机雷达地形测绘仪 (SRTM),它将生成 80% 地球陆地表面的高程图。这次飞行目前列在 2000 年 5 月的航天飞机清单上,但航天飞机时间表的调整可能使 SRTM 飞行更早,或许早在 1999 年春季。
2024-2025 SCC 薪酬计划决议:2024-09-09-03
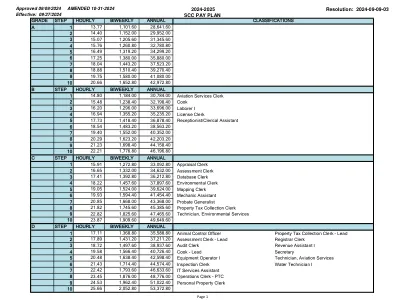
I STEP 每小时 双周 每年 1 24.56 1,964.80 51,084.80 会计文员 III 资源开发协调员 2 25.69 2,055.20 53,435.20 行政助理 II 主管,公路工作人员 3 26.88 2,150.40 55,910.40 助理主管,执照办公室主管,公路分级 4 28.11 2,248.80 58,468.80 审计员,财产税主管,公路材料和货运 5 29.41 2,352.80 61,172.80 副文员主管,公路杀虫剂和标牌 6 30.76 2,460.80 63,980.80 工程助理/检查员 I 主管,零件库存 7 32.18 2,574.40 66,934.40 IT 支持专家 遗嘱认证法院主管 8 33.66 2,692.80 70,012.80 测绘员 II 记录服务主管 9 35.21 2,816.80 73,236.80 机械师水务技术员 III 10 36.84 2,947.20 76,627.20
![arxiv:2204.09840v1 [eess.sp] 2022年4月21日](/simg/5\504a728d3f527df747c3c63716c58715487243b8.webp)
arxiv:2204.09840v1 [eess.sp] 2022年4月21日
摘要。可以通过观察大脑结构和功能连接性中的替代性来检测几种脑部疾病。神经疾病的发现表明,诸如轻度认知障碍(MCI)之类的脑疾病的早期诊断可以预防甚至将其发展为阿尔茨海默氏病(AD)。在这种情况下,最近的研究旨在通过提出在大脑图像上使用的机器学习模型来预测大脑连接的演变。但是,这种方法是昂贵且耗时的。在这里,我们建议将脑连接性用作更有效的替代方案,以通过大脑来依赖时间依赖大脑的诊断,而相反,大型互连图表征了几个大脑区域之间的相互连接方案。我们称我们提出的方法复发性脑图映射器(RBGM),这是一种新型的基于边缘的复发图神经网络,可预测单个基线中脑图的时间依赖性评估轨迹。我们的rbgm包含一组反复的neu-ral网络启发映射器,每个时间点都旨在将地面真相脑图投射到下一个时间点上。我们利用教师强迫方法来提高训练并提高进化的大脑图质量。为了在每个时间点保持预测的脑图及其相应的地面脑图之间的拓扑一致性,我们进一步整合了拓扑损失。我们还使用L 1损失来捕获时间依赖性,并最大程度地减少正规化的连续时间点脑图之间的差异。针对RBGM和最新方法的几种变体的基准表明,我们可以在更有效地预测大脑图演化方面达到相同的准确性,为新颖的图形神经网络体系结构和高度有效的训练方案铺平了道路。我们的RBGM代码可在https://github.com/basiralab/rbgm上找到。

月球挥发物和矿物测绘轨道器(VMMO)
挥发物和矿物学测绘轨道器 (VMMO) 是一个低成本的 12U 立方体卫星概念,最初由欧洲航天局 (ESA) 选为 2018 年 SysNova 挑战赛的两个获胜者之一。VMMO 航天器将使用月球挥发物和矿物学测绘仪 (LVMM) 多波化学激光雷达有效载荷对月球南极永久阴影区域进行挥发物和矿物学勘察,以探测和绘制挥发物和其他资源如钛铁矿 (FeTiO 3 ) 的地图,地面采样距离 (GSD) 约为 100 米。开发宝贵的月球资源,如水冰和其他挥发物,对于未来载人月球基地的可持续性至关重要。尽管之前的月球任务已经在月球两极周围探测到并绘制了水冰地图,但对于月球风化层内挥发物含量的精确分布仍然存在很大的不确定性。未来计划执行多项任务

Gatekeeper-GPU:简短读取映射中快速准确的预订过滤
摘要 - 在简短读取映射的最后一步中,验证了参考基因组上读取的候选位置,以使用序列比对算法从相应的参考段中计算它们的差异。计算两个序列之间的相似性和差异在计算上仍然很昂贵,因为传统上近似的字符串匹配技术继承了具有二次时间和空间复杂性的动态编程算法。我们介绍了Gatekeeper-GPU,这是一种快速准确的预一致过滤器,可有效地减少对昂贵序列比对的需求。Gatekeeper-GPU提供了两个主要贡献:首先,提高了网守的过滤精度(轻巧的预先对准过滤器),其次,利用了由现代GPU的大量GPU螺纹提供的巨大平行性,以快速检查众多序列。通过减少工作,Gatekeeper-GPU提供2.9倍的加速度至序列比对,最高为1。4×加速到全面阅读映射器(MRFAST)的端到端执行时间。Gatekeeper-GPU可从https://github.com/bilkentcompgen/gatekeeper-gpu

hetecooper:异质协作感知的功能协作图
摘要。协作感知通过共享感知信息有效地扩展了代理的感知范围,并且它解决了单车感知中的遮挡问题。大多数现有作品都是基于感知模型同质性的假设。但是,在实际的协作场景中,代理使用不同的感知模型体系结构,这会导致合作者共享的中间功能的规模,渠道数量和语义空间的差异,从而为协作带来了挑战。我们介绍了HeteCooper,这是一个与异质感知模型的场景的合作感知框架。为了建模异质特征之间的相关性,我们构建了特征协作图,该图形完全保留了特征的语义信息和空间信息。此外,基于图形变压器的消息传递机制旨在在功能协作图中传输功能消息。首先,节点通道的数量和语义空间由Sepantic Mapper统一。然后,特征信息是由Edge Weighted引导的注意力集合而来的,最后实现了异质特征的融合。测试结果表明,我们的方法在模型均匀性和异质性方案中都能达到卓越的性能,并且对特征大小的变化也具有良好的可扩展性。
马翁地下水开发项目第一阶段
E-1. 项目区域位置图 E-2. 勘探区域位置 E-3. 奥卡万戈河在莫亨博及其选定支流的年地表水流量 E-4. 记录的各水源水量百分比(1989 年至 1996 年)- 马翁供水区 E-5. 数字地形图 E-6. Landsat 专题制图仪图像 E-7. 机载电磁电导图 E-8. 初始阶段和最终勘探区域的勘探区域边界对比 E-9. 沙舍河谷人工补给试验场 E-10. 沙舍河谷钻孔位置图 E-11. 沙舍河谷地质横截面 E-12. 根据 TEM 测深解释得出的上博罗河谷电阻率剖面 E-13. 第 1 阶段,建议开发:沙舍河谷和下塔马拉卡内河谷 E-14。第 2 阶段,推荐开发计划:上塔玛拉坎河谷和上博罗河谷 E-15. 项目实施时间表 E-16. 马翁资源开发计划大纲