XiaoMi-AI文件搜索系统
World File Search Systemmeasurements
串行机械臂关节特性测量...
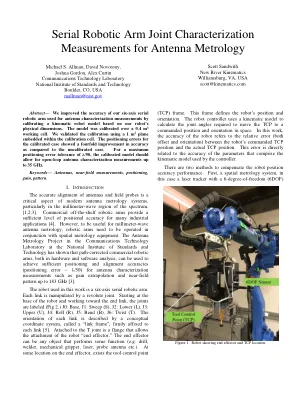
这是现代天线计量系统的一个关键方面,特别是在毫米波频谱区域 [1,2,3]。商用现货机械臂可为许多工业应用提供足够的定位精度 [4]。然而,要用于毫米波天线计量,机械臂需要与空间计量设备配合使用。美国国家标准与技术研究所通信技术实验室的天线计量项目表明,路径校正商用机械臂(无论是在硬件分析中还是在软件分析中)可用于实现足够的定位和对准精度(定位误差 ~λ/50),用于天线特性测量,例如增益外推和高达 183 GHz 的近场方向图 [3]。

审计公允价值计量和披露 - AICPA
.01 本节旨在制定标准并为审计财务报表中的公允价值计量和披露提供指导。特别是,本节涉及与财务报表中以公允价值列示或披露的资产、负债和权益的特定组成部分的计量和披露有关的审计考虑事项。资产、负债和权益组成部分的公允价值计量可能来自交易的初始记录和后来的价值变化。根据公认会计原则 (GAAP),随时间发生的公允价值计量变化可能以不同的方式处理。例如,GAAP 可能要求某些公允价值变动反映在净收入中,而其他公允价值变动则反映在其他综合收入和权益中。
光纤功率测量的国际比较
nist.gov › publication › get_pdf PDF 日本计量研究所/国家计量研究所... 计量学 (METAS-Switzerland),以及 (6) Centro ... S. V. Tikhomirov, A. I. Glazov, M. L..

使用SmartLab System
粉末,散装,薄膜粉末的附件,薄膜X射线源3KW / 9kW0d・1d ・1d ・ 2D检测器反射 /变速箱Johanssonkα1单位(选项)

EEG 信号复杂性测量以增强 BCI-...
摘要:中风是全球第二大死亡原因和最常见的残疾原因之一。研究人员发现脑机接口 (BCI) 技术可以更好地帮助中风患者康复。本研究使用所提出的运动想象 (MI) 框架分析了来自 8 名受试者的脑电图 (EEG) 数据集,以增强针对中风患者的基于 MI 的 BCI 系统。该框架的预处理部分包括使用传统滤波器和独立成分分析 (ICA) 去噪方法。然后计算分形维数 (FD) 和赫斯特指数 (Hur) 作为复杂性特征,并评估 Tsallis 熵 (TsEn) 和弥散熵 (DispEn) 作为不规则参数。然后使用双向方差分析 (ANOVA) 从每个参与者那里统计检索基于 MI 的 BCI 特征,以展示个体在四个类别(左手、右手、脚和舌头)中的表现。降维算法拉普拉斯特征图 (LE) 用于增强基于 MI 的 BCI 分类性能。利用 k 最近邻 (KNN)、支持向量机 (SVM) 和随机森林 (RF) 分类器,最终确定了中风后患者的组别。研究结果表明,使用 RF 和 KNN 的 LE 分别获得了 74.48% 和 73.20% 的准确率;因此,所提出的特征与 ICA 去噪技术的综合集可以准确描述所提出的 MI 框架,可用于探索四类基于 MI 的 BCI 康复。这项研究将帮助临床医生、医生和技术人员为中风患者制定良好的康复计划。
来自随机测量的量子Fisher信息
首先在量子计量学中引入,以衡量量子状态执行超过射击限制的干涉法[1,2]的能力,量子Fisher信息(QFI)在不同领域(包括量子信息理论和多体物理学)中起着基本作用。作为对计量学和感应的增强的敏感性,需要产生多部分纠缠状态[3],QFI引起了重大兴趣作为纠缠的见证。特别是,纠缠“深度”的概念 - 在给定状态下的纠缠颗粒的微型数量 - 以及多部分纠缠的基础结构可能与QFI的值有关[4,5]。在多体物理学中,QFI揭示了混合状态的纠缠的能力使其成为旋转模型研究的关键数量,特别是在有限的温度[6]上跨越相变的量子态的普遍纠缠特性[6],并突出了多部分范围的作用,在拓扑相转变[7]中。这封信提供了一项协议,以通过随机测量值估算最先进的量子设备中的QFI。测量QFI的挑战是由于它是密度矩阵的高度非线性函数而产生的。QFI是针对给定的Hermitian操作员A和量子状态ρ定义的,可以以以下封闭形式写入:

通过产品测量学习量子图状态
量子态的学习已在多种环境中得到研究。在最传统的环境中,量子断层扫描 [1] 研究这种学习问题,而这一主题仍然吸引了大量的关注 [2]、[3]、[4]、[5]。在量子断层扫描中,给定多个相同的副本,我们可以学习到具有规定精度的量子态描述。量子断层扫描研究涉及获得不同量子态系列的此类副本的最小数量 N 的界限。假设 ρ = | ψ ⟩⟨ ψ | 是 n - 量子比特纯态,并且由 ˆ ρ 给出的 ρ 估计值接近于 ρ(对于某个恒定精度,例如在迹线距离中),概率至少为 1 − ǫ 。对于纯态,[6,第 IIA 节] 和 [7] 表明,对于任何测量策略,即使对 ρ 的多个副本应用纠缠操作,我们也有 N = ˜ Θ(2 n + log 1

现场阻抗测量后验尸猪脑
对于实际测量,我们使用了图1所示的设置。它由:(i)控制信号生成和数据采集的笔记本计算机; (ii)带有集成的任意波形发生器的USB示波器(TIEPIE HANDYSCOPE HS5-540)。将从神经刺激器记录的波形发送到任意波形发生器,并使用示波器从(iii)拾取测量信号; (iii)一个测量前端包含: - 将刺激脉冲应用于电极和组织的电压控制的电流源 - 一种测量差分放大器,该放大器测量了电极和组织的电压, - 一种差分放大器,可测量刺激电流的电压降低,以使电阻跨传感电阻器[8]; (iv)双极同轴脑刺激电极(Inomed BCS 45mm 30°)连接到电压控制电流源。电极是带有未绝缘外导体的开放式同轴探针。它的末端具有30°弯曲,长45毫米。电缆长度为3 m。由于其长度,它产生了不必要的寄生能力。如果导体只是略有非圆形[5],则会发生这种现象。补偿电极阻抗时,需要考虑这一点。但是,在本文的背景下,呈现原则的证明,这可以忽略不计。

相对论中的量子信息:量子场论测量的挑战
拟议的深空量子实验将能够探索相对论效应很重要的领域的量子信息问题。在本文中,我们认为,将量子信息论适当扩展到相对论领域需要用量子场论 (QFT) 概念来表达所有信息概念。这项任务需要一个可行的 QFT 测量理论。我们提出了构建这种理论的基本问题,特别是与 QFT 基础中长期存在的因果关系和局部性问题有关的问题。最后,我们介绍了正在进行的量子时间概率计划,用于构建一种测量理论,该理论 (i) 原则上适用于任何 QFT,(ii) 允许对所有相关的因果关系和局部性问题进行第一性原理研究,以及 (iii) 它可以直接应用于当前感兴趣的实验。

许多能量测量的量子优势
量子电路输出采样问题已被提议作为展示量子计算优势(有时称为量子“霸权”)的候选问题。在这项工作中,我们研究是否可以为与物理可观测量测量相关的更具物理动机的采样问题实现量子优势展示。我们专注于对易于准备的产品量子态进行能量测量结果的采样问题 - 我们称之为能量采样。对于不同的测量分辨率和测量误差机制,我们提供了复杂性理论论证,表明不太可能存在有效的经典能量采样算法。特别是,我们描述了一个具有二维晶格上最近邻相互作用的哈密顿量家族,可以使用交换门量子电路(IQP电路)以高分辨率进行有效测量,而有效的经典模拟这一过程应该是不可能的。在这种高分辨率状态下,只有能够以指数级快进的汉密尔顿量才能实现,可以使用当前的理论工具将量子优势陈述与多项式层次崩溃联系起来,而对于较低分辨率的测量,这种论点则失败了。尽管如此,我们表明,如果我们假设量子计算机比经典计算机更强大,那么仍然可以排除用于低分辨率能量采样的有效经典算法。我们相信我们的工作为证明量子优势的问题带来了新的视角,并引发了汉密尔顿复杂性中有趣的新问题。