XiaoMi-AI文件搜索系统
World File Search Systemmobile
移动区信头模板
致所有相关方:美国陆军工程兵团 (USACE) 移动区请求您审查并评论拟议的水生植物管理,佛罗里达州梅里特磨坊池塘。环境评估草案的副本位于以下网站:https://www.sam.usace.army.mil/Missions/Planning-Environmental/Environmental-Assessments/。该文件正在分发给资源机构和感兴趣的公众成员,为期 15 天的评论期。拟议的行动包括两个部分:1) 利用罗丹明 WT 示踪染料进行水交换研究和 2) 进行除草剂处理以控制入侵水生植物。与美国协调鱼类和野生动物管理局和佛罗里达州历史保护官员正在进行中。有关本环境评估草案的通信应通过电子邮件发送给 Velma Diaz 女士,地址为 velma.f.diaz@usace.army.mil,或邮寄至美国陆军工程兵团,莫比尔区,CESAM-PD-EI,收件人:Velma Diaz 女士,邮政信箱 2288,阿拉巴马州莫比尔 36628。评论必须在本通知发布之日起 15 天内收到。
TPN-31.pdf - 移动军用雷达
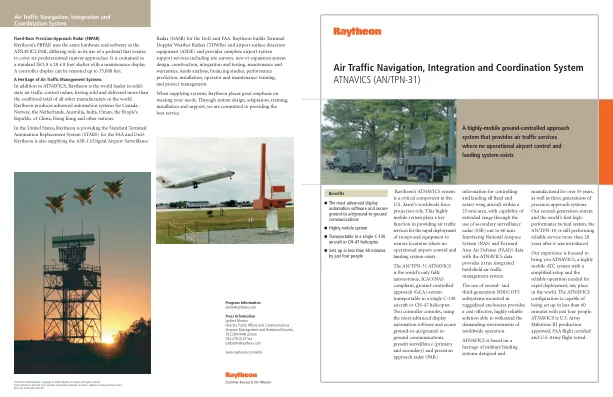
为国防部和联邦航空局提供雷达 (DASR)。雷神公司制造终端多普勒气象雷达 (TDWR) 和机场地面探测设备 (ASDE),并提供完整的机场系统支持服务,包括现场勘测、新系统或扩建系统设计、建造、集成和测试、维护和保修、需求分析、融资研究、性能预测、安装、操作员和维护培训以及项目管理。
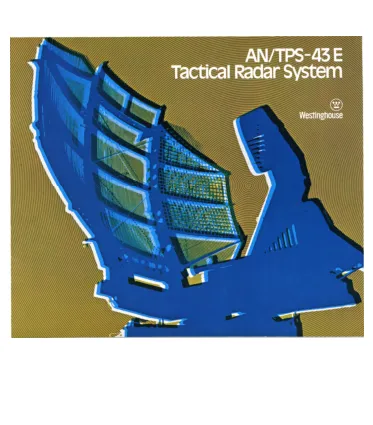
TPS-43——移动军用雷达
Force 要求业界设计一款能够满足一系列独特要求的雷达。美国空军实质上表示:制造一款新型雷达,该雷达将为我们提供可靠的远程三维性能,可与大型固定站组相媲美,同时还具有传统战术雷达所特有的快速可运输性、安装和拆卸性。简而言之,给我们一款兼顾性能和机动性的雷达。Westinghouse 设计的 AN/TPS-43 满足并超越了这套严格且有时在技术上相互冲突的规格。AN/TPS-43 的生产记录证明了美国空军设计理念的智慧。今天,我们生产的 TPS-43 雷达比以往任何时候都多。在撰写本文时,共有 12 个国家订购了 106 套雷达。其中一半是新“E”型。仅美国空军就已三次重新订购 TPS-43。“E”型的设计是美国空军理念的最新改进。它是一种独特的改进,基于数千小时的实地部署和战场使用经验,并结合了现代数字和固态技术。AN/TPS-43E 将在后面的页面中详细介绍。
移动环境的可靠性方法
3.5.2.3 使用................................................................................................................................ 75
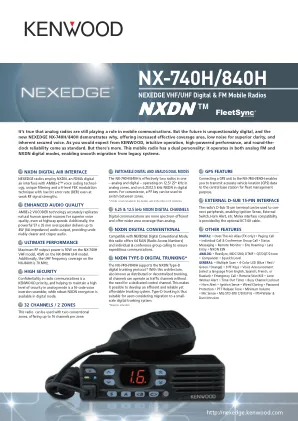
NX-740H/840H |地平线移动
数字: • 无线别名(仅限 TX) • 寻呼 • 个呼和会议组呼 • 状态消息 • 远程监控 • 站点漫游 • 迟到 • NXDN ESN 模拟: • FleetSync、MDC-1200、DTMF • QT/DQT/2-tone • 压扩器 • 静噪等级 常规: • 多重扫描 • 四色 LED(蓝 / 红 / 绿 / 橙) • 9 个 PF 键 • 语音播报(从英语、西班牙语、法语或俄语中选择一种语言) • 紧急呼叫 • 远程电击/杀死 • 单独工作者警报 • 超时计时器 • 繁忙信道锁定 • 喇叭警报 • 点火感应 • 有线克隆 • 密码保护 • PTT 释放音 • 最小音量 • 麦克风感应 • MIL-STD-810 C/D/E/F/G • IP54 防水防尘

2024 年移动创新报告
5G 共建共享——降低部署成本 11 连接未连接者——非洲首个电信浮空器 12 迈向绿色——降低网络能耗 14 5G 自动化农业——提高产量,减少浪费 16 亚运会数字孪生网络生命周期管理 17 支持 5G 和 XR 的数字孪生商店——引人注目的共存 18 Bridge Alliance 联合边缘中心——实现沉浸式娱乐 19 5G——使企业无人机能够超视距飞行 20 5G 无人机测试 20 5G 无人机——用于库存管理和监控 21 5G New Calling——开辟新的通信服务 22 5G-Advanced——性能的根本升级 23 5G mmWave——在人口密集的地方实现超高速连接 24 索尼为 NTN 提供技术支持——使用 Murata 的 1SC 模块和 Skylo 的网络 25 被动物联网——自动资产跟踪 26 诺基亚网络即代码– 可编程网络 27 授权推送支付欺诈 28 金融移动应用的企业身份验证 29 GSMA 5G 转型中心 30

移动计算上的5G技术
VIII。 参考文献[1] 5G萨达姆·霍斯因(Saddam Hossain)的无线通信系统,《美国工程研究杂志》(AJER),EISSN,EISSN:2320-0847 P-ISSN:2320-0936:2320-0936,第10期,第10期,第10期,PP-344-353 [2]一份关于5G无线网络的审查论文,由KHUSHNEET KARIS,KARAUS,KARAUS,KARER,KARER,KARER,KARER,KARER,KARER,KARER,KARER,KARER,KARER,KAR, (IJERT),ISSN:2278-0181,由,www.ijert.org,v-impact-2016_2会议论文集,第4卷,第32期[3]介绍有关5G移动技术的介绍。 Bhavika Patel教授,Mehul Patel先生,国际工程研究与技术杂志(IJERT),ISSN:2278-0181,第1卷。 6,第06期,6月至2017年[4] https://www.ecn.co.za/what-are-are-the-the-disadvantages-of-5g/VIII。参考文献[1] 5G萨达姆·霍斯因(Saddam Hossain)的无线通信系统,《美国工程研究杂志》(AJER),EISSN,EISSN:2320-0847 P-ISSN:2320-0936:2320-0936,第10期,第10期,第10期,PP-344-353 [2]一份关于5G无线网络的审查论文,由KHUSHNEET KARIS,KARAUS,KARAUS,KARER,KARER,KARER,KARER,KARER,KARER,KARER,KARER,KARER,KARER,KAR, (IJERT),ISSN:2278-0181,由,www.ijert.org,v-impact-2016_2会议论文集,第4卷,第32期[3]介绍有关5G移动技术的介绍。Bhavika Patel教授,Mehul Patel先生,国际工程研究与技术杂志(IJERT),ISSN:2278-0181,第1卷。 6,第06期,6月至2017年[4] https://www.ecn.co.za/what-are-are-the-the-disadvantages-of-5g/Bhavika Patel教授,Mehul Patel先生,国际工程研究与技术杂志(IJERT),ISSN:2278-0181,第1卷。6,第06期,6月至2017年[4] https://www.ecn.co.za/what-are-are-the-the-disadvantages-of-5g/