XiaoMi-AI文件搜索系统
World File Search Systemmodification

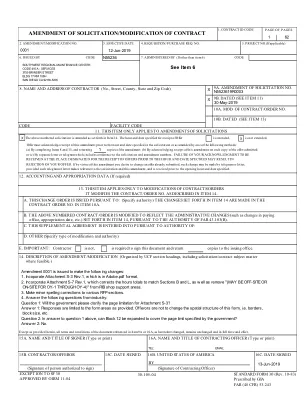
招标修订/修改...
发布修订 0001 以进行以下更改: 1. 合并附件 S-3 Rev.1,其格式为 Adobe.pdf。 2. 合并附件 S-7 Rev.1,其更正了小时总数以匹配 B 和 L 部分,并从 RIB 车间支持区域中删除“(对于 OY-1 至 OY-4 可能在场外或场内)”。 3. 对 RFP 各部分进行细微拼写更正。 4. 回答行业提出的以下问题: 问题 1:政府能否澄清附件 S-3 的页数限制? 回答 1:回复仅限于提供的表格区域。投标人不得更改此表格的空间结构,即边框、块大小等。 问题 2:在回答上述问题 1 时,是否可以扩展块 12 以涵盖政府指定的页数限制?答案 2:不是。
CRISPR 与基因改造
基本的 CRISPR-Cas9 系统由两种分子组成,它们将一种或多种修饰引入 DNA。第一种分子 Cas9 是一种酶,它充当一对“分子剪刀”,可以在特定位置切割 DNA 的两条链,以便添加新的 DNA 片段或去除现有的 DNA。Cas9 的改良版本已被开发出来,只能切割一条 DNA 链,而另一种已被开发出来,可以与 DNA 结合而无需任何切割。第二种分子是一段称为向导 RNA (gRNA) 的 RNA,由一小段预先设计的 RNA 序列(约 20 个碱基长)组成,位于较长的 RNA 支架内。支架与 DNA 结合,预先设计的序列将 Cas9 引导到正确的位置。向导 RNA 具有与目标 DNA 序列互补的 RNA 碱基。这意味着向导 RNA 将只与目标序列结合并将 Cas9 递送到目标序列。当 Cas9 切割 DNA 时,细胞会识别出 DNA 已受损并试图修复。因此,科学家利用细胞自身的 DNA 修复机制来改变基因组中的一个或多个基因。

用...
摘要。手势确定的动态功能(GDDF)是一种有效的方法来处理人形机器人的控制问题。特别是GDDF来限制人形机器人和转向特定手势的双臂运动,以在某些条件下执行苛刻的任务。但是,该方案仍然有缺乏效率。通过实验,我们发现双臂的关节可以被视为冗余操纵器,可以在关节角度稍微超过其极限。性能直接取决于事先为GDDF设计的参数,这导致对该方法的实际应用缺乏适应性。在本文中,提出了一个考虑边缘(MGDDF)的GDDF的修改方案。此MGDDF方案基于二次编程(QP)框架,该框架被广泛应用于解决机器人臂的冗余问题。此外,在拟议的MGDDF方案中引入了三个边距,以避免联合限制。考虑到这些边缘,人形机器人机器人的操纵者的关节将不会超过其限制,并且将完全避免可能由超过限制造成的潜在损害。在MATLAB上进行的计算机模拟进一步验证了拟议的MGDDF方案的可行性和优势。