XiaoMi-AI文件搜索系统
World File Search Systemmovement
JSP 800 国防运动和运输条例...
在支持国防方面,国防参谋长助理 (ACDS) 后勤行动 (Log Ops) 负责提供清晰、及时和专业的后勤指导和指导,以支持部门计划、当前和应急行动。此外,他还负责协调后勤政策的制定;以最大限度地提高作战指挥官的行动自由并确保 E2E 后勤企业。联合服务出版物 800 (JSP 800) 规定了国防部运输(移动和运输 (M&T))的总体政策,以履行我们的法定义务和国防国务大臣 (SofS) 的指导政策。该政策还有助于确保和履行国防部对我们自己的人民和公众的注意义务。本 JSP 提供了强制性要求的指导(第 1 部分)以及如何实现这些要求的指导(第 2 部分)。各级指挥官和管理人员应确保遵守此处的指令。如果对指令的应用存在疑问,或需要针对具体情况的指导,则应寻求指挥链 (Ch of Comd) 内专家(即具有适当资格和经验的人员 (SQEP))的调动和运输人员的帮助。少将 Angus Fay CB 国防参谋部助理参谋长(后勤行动)
应用说明: - 位置和运动传感器解决方案
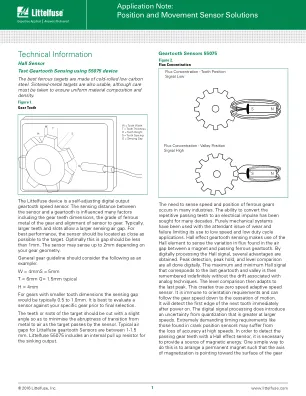
许多行业都需要感测铁质齿轮的速度和位置。几十年来,人们一直在寻求将重复经过的齿转换为电脉冲的能力。纯机械系统一直被使用,但随之而来的磨损和故障问题限制了其在低速和低占空比应用中的使用。霍尔效应轮齿感测利用霍尔元件来感测磁铁和经过的铁质轮齿之间的气隙中发现的磁通量变化。通过对霍尔信号进行数字处理,可以获得几个优势。峰值检测、峰值保持和电平比较都是以数字方式完成的。然后,与最后一个轮齿和谷值相对应的最大和最小霍尔信号将被无限期地记住,而不会出现与模拟技术相关的漂移。然后,电平比较将适应最后一个峰值。这创造了真正的零速自适应速度传感器。它不受方向要求的影响,可以跟踪齿轮速度直至运动停止。它将在通电后立即检测下一个齿的第一个边缘。数字信号处理确实会引入量化的不确定性,这种不确定性在速度较高时会更大。曲轴位置传感器中存在极其苛刻的计时要求,在高速下可能会损失精度。为了使用霍尔效应传感器检测通过的齿轮齿,必须提供磁能源。一种简单的方法是

JSP 800 - 国防运动和运输条例...
在支持国防方面,国防参谋长助理 (ACDS) 后勤行动 (Log Ops) 负责提供清晰、及时和专业的后勤指导和指导,以支持部门计划、当前和应急行动。此外,他还负责协调后勤政策的制定;以最大限度地提高作战指挥官的行动自由并确保 E2E 后勤企业。联合服务出版物 800 (JSP 800) 规定了国防部运输(移动和运输 (M&T))的总体政策,以履行我们的法定义务和国防国务大臣 (SofS) 的指导政策。该政策还有助于确保和履行国防部对我们自己的人民和公众的注意义务。本 JSP 提供了强制性要求的指导(第 1 部分)以及如何实现这些要求的指导(第 2 部分)。各级指挥官和管理人员应确保遵守此处的指令。如果对指令的应用存在疑问,或需要针对具体情况的指导,则应寻求指挥链 (Ch of Comd) 内专家(即具有适当资格和经验的人员 (SQEP))的调动和运输人员的帮助。少将 Angus Fay CB 国防参谋部助理参谋长(后勤行动)

FM 100-17-3 接收、准备、前进...
本手册建立了 RSO&I 的理论框架,即产生战斗力的过程。它通常被视为后勤问题,但事实上,它是一项关键的作战挑战,依靠后勤基础设施才能成功执行。在力量投送环境中,执行任何任务的能力在很大程度上取决于战斗力在所需位置集结的速度。这不仅仅涉及将士兵和装备带入战区。相反,必须高效接收这些部分,迅速组建成部队,迅速转移到战术集结区,并无缝集成到任务行动中。此外,这些部队的数量、类型和排序必须支持指挥官的作战概念。因此,RSO&I 必须纳入最早的作战规划中。
JSP 800 国防运动与运输条例...
在支持国防方面,国防参谋长助理 (ACDS) 后勤行动 (Log Ops) 负责提供清晰、及时和专业的后勤指导和指导,以支持部门计划、当前和应急行动。此外,他还负责协调后勤政策的制定;以最大限度地提高作战指挥官的行动自由并确保 E2E 后勤企业。联合服务出版物 800 (JSP 800) 规定了国防部运输(移动和运输 (M&T))的总体政策,以履行我们的法定义务和国防国务大臣 (SofS) 的指导政策。该政策还有助于确保和履行国防部对我们自己的人民和公众的注意义务。本 JSP 提供了强制性要求的指导(第 1 部分)以及如何实现这些要求的指导(第 2 部分)。各级指挥官和管理人员应确保遵守此处的指令。如果对指令的应用存在疑问,或需要针对具体情况的指导,则应寻求指挥链 (Ch of Comd) 内专家(即具有适当资格和经验的人员 (SQEP))的调动和运输人员的帮助。少将 Angus Fay CB 国防参谋部助理参谋长(后勤行动)
动物权利运动和公共政策 - NSUWorks
本论文由 NSUWorks 的 CAHSS 论文和学位论文提供给您。它已被 NSUWorks 的授权管理员接受并纳入冲突解决研究系论文和学位论文。如需更多信息,请联系 nsuworks@nova.edu。

使用任务的运动和语音功能映射...
客观的立体电脑摄影(SEEG)已成为颅内癫痫发作局部iZation的主要方法。当成像,符号学和头皮脑电图发现并不完全一致或定位时,植入的seeg记录用于测试候选癫痫发作区(SOZS)。发现的SOZ可能是针对切除,激光消融或神经刺激的。如果SOZ雄辩,则禁忌切除和消融,因此识别功能表示对于治疗决策至关重要。作者提出了一种新型的功能性脑图技术,该技术在行为任务过程中利用基于任务的电生理学变化,并在儿科和成年患者中对此进行测试。方法记录了20例癫痫患者,年龄从6岁到39岁(12名女性,20例患者中的18岁),并进行了植入监测以识别癫痫发作。每次执行1)记录肌电图时在视觉提示的手,脚或舌头的简单重复运动; 2)记录音频时简单的图片命名或动词生成语音任务。在行为和休息之间比较了Seeg记录功率谱的宽带变化。所有20例患者的运动和/或语音区域的电生理功能映射均已完成。雄辩的表示,通常对应于经典的功能解剖组织以及其他临床映射结果。在健康的大脑,发育或获得的结构异常和SOZ的健康区域中鉴定出了强大的脑活动图。结论基于任务的电生理学映射使用SEEG信号中的宽带变化可靠地识别小儿和成人癫痫患者的运动和语音表示。
交通与地点评估指南 - 新南威尔士州交通局
在评估场所营造效益之前,应该先明确了解场所的构成。在一些项目中,很难就场所定义达成共识。政府机构一直在讨论如何定义“场所”,每个利益相关者都有特定的重点领域来定义“好场所”。例如,规划人员专注于为“运动与场所”的城市提供高水平的未来愿景。城市设计师为火车、公交车、地铁、高速公路和主干道提供的交通走廊以及城镇、社区和街道场所的功能提供可建造的细节。经济学家试图为好场所分配美元价值,以便合理分配资源来创建或改善这些场所。交通系统构成了建筑物和非建筑空间之间公共空间的主要部分。根据其规模和位置,道路和街道可以提供我们散步、吃饭、喝酒、购物、使用公共建筑和骑自行车的环境,从而有助于公共领域的特征和活力。因此,场所营造是一个协作过程,通过这一过程,运动和场所从业者可以塑造公共领域,以最大限度地实现共享价值。同时,值得注意的是,运动和场所功能可能会与有限的道路和其他公共空间竞争。这不仅仅是一个促进更好的城市设计的过程。它促进了场所使用的创造性模式,特别关注物质、文化和社会身份,并支持其不断发展,以加强人们与他们共享的场所之间的联系。

上下扩展:微生物的运动生态学
运动对于大小的生物的纯度至关重要。它决定了个人如何获得资源,逃避掠食者,交换遗传物质并对压力环境的反应。运动还影响了较高的组织层面(例如人口和社区)的生态和进化动态。但是,个人运动与产生和维持微生物多样性的过程之间的联系知之甚少。运动生态学是一个框架,将个人的生理和行为证明与跨时空,时间和生物组织范围的运动模式联系起来。通过综合细胞生物学,生态学和进化的见解,我们将理论从运动生态学扩展到预测微生物运动的原因和后果。
灰熊的栖息地选择和预测的运动......
在过去两个世纪中,迫害和栖息地丧失导致灰熊(Ursus arctos)的数量从大约 50,000 只减少到美国大陆仅有的 4 个分散种群。近几十年来,由于《濒危物种法》下的合作保护努力和保护,这些种群的数量和范围都有所增加和扩大。今天,北部大陆分水岭生态系统 (NCDE) 和大黄石生态系统 (GYE) 中的种群估计都超过 1000 只。塞尔柯克生态系统 (SE) 有大约 50 只灰熊,而 Cabinet-Yaak 生态系统 (CYE) 的扩建帮助将种群数量增加到估计的 50 – 60 只。到目前为止,比特鲁特 (BE) 和北喀斯喀特生态系统 (NCE) 没有任何已知的永久居民。