XiaoMi-AI文件搜索系统
World File Search Systemnip
国际科学会议的法规...
国际科学会议“病原体与免疫力:超越感染 - 传染病对生活质量的长期影响”; b)参与者 - 任何已经注册参加“病原体与免疫力:超越感染的人),根据这些法规的规定,传染病对生活质量的长期影响”国际科学会议; c)组织者或基金会 - 基于克拉科夫的传染和免疫疾病研究所I3基金会(Ul。dukatów10a,31-431克拉科夫),在Kraków -Kraków -śródmieście的其他社会和专业组织,其他社会和专业组织,基金会和独立公共卫生保健设施中进入Kraków,Kraków在Kraków,Kraków,National Count登记的KRS Number Number Number Number Nubm Nige 0000613402,NIP 679,NIBS NAMEN CORMANG登记册364267110; D)合作伙伴 - 国际科学会议的合作伙伴:“病原体与免疫力:超越感染 - 传染病对生活质量的长期影响”;合作伙伴列表可以在会议网站上的合作伙伴下找到; e)民法典 - 1964年4月23日的法案。- 民法典(统一文本,dz。U.- 修订的2020年法律杂志,第1740项项目); f)欧洲议会2016/679 2016/679及2016年4月27日理事会的Rodo法规(EU),涉及对个人数据的处理以及此类数据的自由流和废除指令95/46/EC的自由流(一般数据保护法规)(一般数据保护法规)(OJ EU“ L” 2016/119/19/1)。
阿富汗新冠肺炎疫苗接种国家计划
AEFI 免疫接种后的不良事件 AFP 急性弛缓性麻痹 ARTF 阿富汗重建信托基金 COVAX AMC COVAX 预先市场承诺 BHC 基础卫生中心 BPHS 基本卫生服务包 CBHC 社区医疗保健 CCC 控制指挥中心 CEPI 流行病防范创新联盟 CHC 综合卫生中心 CHS 社区卫生监督员 CHW 社区卫生工作者 COVAX COVID-19 疫苗 COVID-19 冠状病毒病 2019 CRF 病例报告表 DCO 区联络官 DH 区医院 DHO 区卫生官员 DPO 区脊髓灰质炎官员 EPHS 基本医院服务包 EPI 扩大免疫规划 EPR 应急准备与响应 GAVI 全球疫苗接种和免疫联盟 GDPM 疾病控制和预防总局 HF 卫生机构 HLHPOC 高级卫生计划监督委员会 IDA 国际开发协会 IDP 境内流离失所者 MDB 多边开发银行 MHT 流动医疗队 MoF 财政部 MoHE 部委高等教育部 MoPH 公共卫生部 NDSR 国家疾病监测与应对 NEOC 国家紧急行动中心 NIP 国家免疫计划 NMHRA 国家医药卫生监管局 NRA 国家监管局 PCO 省级通讯官 PEMT 省级 EPI 管理团队 PH 省级医院 PPHD 省级公共卫生局局长
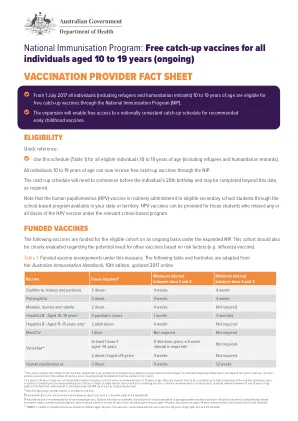
疫苗接种提供者概况
*此列概述了以前未接受该抗原疫苗剂量的人所需的疫苗剂量数量。要确定接受以前的疫苗剂量的人需要进一步的剂量,通常应从本列中的数量中扣除以前剂量的数量。‡如果≥10岁的一个人尚未收到10岁以前建议的百日咳疫苗剂量的数量,则他们仅需要考虑1剂量的剂量(无论他们在10岁以前收到的持续剂量的疫苗量如何)。通常建议所有青少年使用单一促进剂量的含百日咳疫苗,最佳地送达11至13岁之间(请参阅4.12岁的百日咳)。鉴于DT未在NIP下资助,最多可以使用3剂DTPA。^注意年龄组重叠,这是一个/或不是两者。§对于乙型肝炎疫苗,剂量1和剂量3之间的最小间隔为4个月(请参阅4.5丙型肝炎)。#建议所有非免疫人员进行水痘疫苗。没有不确定的临床病史或没有适合年龄的水痘疫苗的儿童被视为易感并提供疫苗接种,除非对先前的自然感染进行了自信的临床诊断。至少应将1剂给予年龄<14岁的年龄,所有年龄≥14岁的人应接受2剂(另请参见4.22 Varicella)。** MMRV适合在年龄<14岁的儿童中提供水疗疫苗接种。不建议将这种疫苗用于≥14岁的人(另请参见4.22 Varicella)。
澳大利亚自身免疫性炎症性风湿病 (AIIRD) 患者 (>18 岁) 的疫苗接种 全科医生和辅助健康专家
可用的活疫苗 水痘带状疱疹 • 请参阅下文有关灭活水痘带状疱疹疫苗 Shingrix 的信息,该疫苗目前在国家免疫计划 (NIP) 中提供,是接受免疫抑制治疗的人的首选疫苗,因为它可以与当前的免疫抑制药物无关地进行接种。 • 活水痘带状疱疹疫苗是 Varivax 和 Varilrix,它们是低剂量配方,经批准用于儿童和成年人群的水痘疫苗接种。 • 建议在接种疫苗之前评估免疫抑制患者的水痘带状疱疹状态。如果没有先前感染水痘带状疱疹的血清学证据,可在评估免疫抑制水平后考虑接种较低剂量的活水痘疫苗 (Varivax 和 Varilrix) 以预防水痘 - 请参见下文(对于年龄 ≥ 13 岁的人,接种两剂,Varivax 间隔 > 4-8 周,Varilrix 间隔 > 6 周)。• 建议在开始使用 b/tsDMARDs 治疗前至少一个月接种水痘带状疱疹疫苗 (Varivax 和 Varilrix)。 • 如果患者正在服用以下任何一种药物,则带状疱疹疫苗接种并非禁忌:低剂量糖皮质激素(相当于泼尼松龙≤20mg/天)或以下常规合成 DMARD(csDMARD):羟氯喹、柳氮磺吡啶、甲氨蝶呤(≤0.4mg/kg/周)和硫唑嘌呤(≤3mg/kg/天)。如果接种了带状疱疹疫苗,则无需停止/停用这些药物。如果患者正在服用上述任何一种药物的组合,请寻求风湿病专家的建议。对于服用来氟米特的人是否安全接种水痘带状疱疹疫苗,目前尚无统一的建议。• 虽然缺乏数据,但在接种活疫苗之前应停止使用 b/tsDMARD。请咨询风湿病专家,了解应错过的剂量数以及何时重新开始使用 b/tsDMARD。无论如何,应建议患者及时寻求
![[新闻稿] Lintasarta 加强作为 AI 工厂的角色......](/simg/5\54a1a64aac7859fe12801dd57b1afa24b9f77092.png)
[新闻稿] Lintasarta 加强作为 AI 工厂的角色......
印度尼西亚雅加达,2024 年 11 月 6 日——Lintasarta 是印度尼西亚 Indosat Ooredoo Hutchison(Indosat 或 IOH)集团的 AI 工厂,宣布与 6Estates 建立战略合作伙伴关系,后者是一家总部位于新加坡的人工智能 (AI) 解决方案提供商,专门从事特定领域的学习语言模型 (LLM) 和企业 AI 应用程序。此次合作将支持 AI 的采用并推动印度尼西亚的 AI 转型和创新。作为印度尼西亚唯一的 NVIDIA 认证合作伙伴 (NCP),Lintasarta 通过 GPU Merdeka 提供 NVIDIA 尖端 GPU 基础架构的访问权限,使客户能够利用先进的 AI 和机器学习 (ML) 功能。主要目标是为需要大量计算能力的应用程序提供无缝且强大的计算资源,包括各种基础设施和平台服务。 “作为 Indosat 集团的 AI 工厂,此次合作对 Lintasarta 来说是一个战略性举措,它将我们的 GPU Merdeka 基础架构的强大功能与 6Estates 基于 LLM 的 Gen AI 技术相结合。我们致力于通过此次合作支持印尼经济的增长,提高基于 AI 的数字服务的普及率,发展优先考虑国家数字主权的生态系统,推动该国的 AI 转型,”Lintasarta 总裁兼首席执行官 Bayu Hanantasena 表示。同时,NVIDIA 初创合作伙伴 (NIP) 6Estates 专门为各个行业提供由 LLM 提供支持的企业 AI 解决方案。其旗舰产品 IDP(智能文档处理)可快速准确地提取和分析文档。此外,6Estates 的 FAAS(贷方工作流自动化)应用程序可为贷方提供全面的工作流自动化,从入职和欺诈分析到信用分析和报告生成。Lintasarta 旨在向其现有客户提供这些 AI 解决方案,尤其是银行和金融服务行业的客户。
2020 年肺炎球菌疾病网络研讨会问题和...
1、3、4、5、6A、6B、7F、9V、14、18C、19A、19F 和 23F NCIRS“澳大利亚人肺炎球菌疫苗”情况说明书可能是一个方便的资源工具......http://ncirs.org.au/sites/default/files/2020-07/Pneumococcal-fact-sheet_1%20July%202020_FINAL.pdf 土著和托雷斯海峡岛民儿童和 Pneumovax 23 的补种疫苗是什么? 2015 年 7 月 1 日或之后出生的南澳大利亚州、北领地、西澳大利亚州和昆士兰州的土著和托雷斯海峡岛民儿童有资格接种 2 剂 23vPPV 疫苗作为补种。当一次给婴儿注射多针疫苗时,我们是否应该将 Prevenar 13 和流感疫苗分别注射?这是针对 12 个月疫苗的,我们按照 NIP 计划注射 3 针疫苗,并且通常在左臂单独注射 Prevenar。如果父母此时选择注射流感疫苗,是否应该注射在右臂,与 Prevenar 相反?Prevenar 13 和流感疫苗可以注射在婴儿的同一肢体上。建议将注射部位分开 2.5 厘米并记录每个疫苗部位。建议最后注射最痛苦的疫苗(例如 Prevenar 13),但是,如果您为澳大利亚原住民和托雷斯海峡岛民婴儿或父母已购买疫苗的其他人接种 Bexsero,Bexsero 也是一种痛苦的疫苗。如果孩子需要在同一次就诊时注射 3 或 4 种肌肉注射疫苗,则选择取决于孩子的三角肌质量。如果三角肌肿块较大,则每侧三角肌最多注射 2 针(间隔 2.5 厘米)。如果三角肌肿块较小,则在大腿前外侧各注射 1 针(如果在同一大腿上注射 2 针,间隔 2.5 厘米)。

vng咨询反应 - edna-poception.pdf div>
亲爱的Heer van Beuningen,亲爱的Heer van der Steen,在这封信中,我们将向您发送对定居草案变更草案的磋商反应,而在环境计划中将Edna作为公认的措施包括在环境方案中。为此,我们与来自不同市政当局的(城市)生态学家进行了交谈,并研究了相关文件。首先,我们要强调的是,市政当局非常高兴,政府探讨了在绝缘后探索物种保护的替代物种,并调查了其可靠性。研究对Edna的附加值表示乐观,以此作为排除腔墙中蝙蝠的存在的帮助。这是SMP和NVI旁边的乐器。edna提供了在自然日历之外隔离的机会,因此对于保持能源费用负担得起和能源过渡的进度至关重要。在Spuk nip lai的情况下,市政当局获得了手段,以减轻所有者被占用的房屋中的弱势居民,并通过隔热材料进行补贴和采购措施。但是,在绝缘后的物种保护问题会导致延迟。因此,我们理解并分享了可以尽快应用Edna的愿望。我们也有许多担忧和关注点,我们很乐意与您分享。验证研究提供了注意点以提高可靠性,验证研究表明埃德娜是追踪物种的有前途的方法。根据他们的说法,如果您想整整一年的第2轮使用Edna,这是必要的。我们还提请人们注意这些研究的呼吁,以研究DNA的分解时间和可以使用Edna发现的物种。研究人员指出,尚不清楚DNA将留在居住地多长时间,而EDNA 1可以检测到多长时间。我们还在报告中阅读了进一步的研究

制造磁性分子印迹聚合物,以选择性提取食品基质中的二丁酰胺
摘要:在这项研究中,使用Dibutyl邻苯二甲酸酯(DBP)制备了一种具有金属有机骨架(Fe 3 O 4 @MOF)载体的新型磁性分子印记的聚合物材料(Fe 3 O 4 @Mof @Mip-160)。该材料可用于食物中痕量的邻苯二甲酸酯(PAE)的有效,快速和选择性提取,并可以通过气相色谱 - 质谱法(GC-MS)检测它们。优化了材料的合成条件,以制备具有最高吸附性能的Fe 3 O 4 @MOF @MIP160。透射电子(TEM),傅立叶变换红外光谱(FT-IR),振动样品磁(VSM)和Brunauer – Emmett – Teller(BET)方法用于表征材料。与Fe 3 O 4 @MOF和磁性未印刷的聚合材料(Fe 3 O 4 @Mof @nip),Fe 3 O 4 @Mof @MIP @MIP-160具有轻松且快速地操纵磁性磁性的优势聚合物。Fe 3 O 4 @MOF@MIP-160 has good recognition and adsorption capacity for di-butyl phthalate (DBP) and diethylhexyl phtha- late (DEHP): the adsorption capacity for DBP and DEHP is 260 mg · g − 1 and 240.2 mg · g − 1 , and the adsorption rate is fast (reaching equilibrium in about 20最小)。此外,与传统的固相提取材料相比,Fe 3 O 4 @MOF @MIP160可以回收六次,使其具有成本效益,易于操作和节省时间。这证明了Fe 3 O 4 @Mof @MIP160适合从食物矩阵中检测和删除PAE。分析了饮用水,果汁和白葡萄酒中邻苯二甲酸酯的含量,回收率范围从70.3%到100.7%。

对深色溶剂的综述,作为用于膜制造和分离的绿色溶剂的新兴类别
深层溶剂(DES)正在成为膜技术的环保和有效替代品,比传统溶剂具有可持续的优势。本评论汇编了将DES纳入聚合物膜系统的最新进步,以进行多种分离过程,包括超滤(UF),微滤(MF),纳米滤过(NF),反向渗透(RO),向前渗透(FO),Perva Porva Poration,Perva Poration和Membrane Distillation(RO)。特别注意的是涉及在非溶剂诱导相分离(NIP),界面聚合(IP)和静电纺丝中的DES的制备方法。值得注意的发展包括将DES整合到各种膜类型中,例如NF和FO中的薄膜复合材料(TFC),在Perveporation中的支持液膜(SLM)以及UF中的不对称混合基质膜。审查将DES分类为亲水性或疏水性,揭示了它们各自的作用和应用。对氢键供体(HBD)和受体(HBA)(HBA)的批判性检查提供了视线,以介绍基于DES的膜背后的分离机制。所解决的核心挑战是膜内浸出的复杂行为,这对过滤过程的性能,效率和纯度具有不同的影响。一些研究已经阐明了DES组件的稳定性和故意浸出以增强膜功能,但在水过滤过程中des浸出的特定问题时,研究显然很少。这突出了现有的研究空隙,并提出了未来研究的方向。这项全面的审查是进一步开发和更广泛地采用基于DES的膜技术的路线图,同时确定了优势和改进领域。
拉丁美洲和加勒比地区的快速疫苗供应诊断......
ASC 可供商业化的供应量 BCG 卡介苗(抗结核病) CELAC 拉丁美洲和加勒比国家共同体 CEPAL 联合国拉丁美洲和加勒比经济委员会 CEPI 流行病防范创新联盟 CMO 合同制造组织 COVID-19 2019 冠状病毒病 CRO 合同研究组织 DTP 白喉破伤风和百日咳疫苗 DTP1 白喉破伤风和百日咳疫苗第一剂 DTP3 白喉破伤风和百日咳疫苗第三剂 EPI 扩大免疫规划 HepB 乙肝疫苗 Hib 乙型流感嗜血杆菌疫苗 HIC 高收入国家 HPV 人乳头瘤病毒疫苗 IADB 美洲开发银行 IFPMA 国际制药商与协会联合会 LAC 拉丁美洲和加勒比地区 LMIC 中低收入和中低收入国家 MCV1 含麻疹疫苗第一剂 MCV2 含麻疹疫苗第二剂MI4A 疫苗接种市场信息倡议 MMGH MMGH 咨询 MMR 麻疹、腮腺炎和风疹疫苗 MMR-V 麻疹、腮腺炎、风疹和水痘疫苗 MR 麻疹-风疹 mRNA 信使核糖核酸 NIP 国家免疫计划 NRA 国家监管机构 PAHO 泛美卫生组织 PCV 肺炎球菌结合疫苗 PCV1 肺炎球菌结合疫苗第一剂 PROSUR 南美洲进步与发展论坛 SARS-CoV-2 严重急性呼吸道综合征冠状病毒 2 UMIC 中上等收入国家 UNDP 联合国发展计划 UNICEF 联合国儿童基金会 USD 美元 WGI 全球治理指标 WHO 世界卫生组织 WUENIC 世卫组织/联合国儿童基金会对国家免疫覆盖率的估计 YFV 黄热病疫苗