XiaoMi-AI文件搜索系统
World File Search Systemniti
早期刺激角-1000天
vikram shila partne wi the ber nard van lee r inDountati在Fateh pur,uttar prad Esh和Odisha的Koraput中,作为Niti AA Yog Aa aa Yog asp Irat di Icts的一部分(ad ad P)的一部分(ad P)重点是通过响应式护理和早期学习机会在生命的头1000天内健康的身体和社会心理发展。该项目旨在加强育儿服务,在关键的1000天内使儿童和看护人受益。它由年龄且在发展上适当的简单游戏材料组成,可以在家里轻松制作,而Anganwadi中心具有低/无成本材料。

CSIR-CECRI第77届基金会日CSIR-CECRI第77届基金会日
CSIR-中心电化学研究所(CSIR-CECRI)的第77届基金会日于2024年7月25日以极大的热情和热情庆祝。Padma Bhushan博士V.K. 萨拉斯瓦特(saraswat),尼蒂·阿亚格(Niti Aayog)的Hon'ble成员,新德里(Nati Aayog)担任首席嘉宾,并在卡拉库迪(Karaikudi)的Csircecri举行了基础演讲。 之前,CSIR-Cecri主任K. Ramesha博士欢迎八月的聚会。 在他的欢迎讲话中,他简要概述了CSIR-Cecri于1948年成立以来的历史发展,并回顾了伟大的有远见的RM博士的努力。 Alagappa Chettiar负责在Karaikudi建立这项主要的研究实验室。 他还强调了各种研究领域的CSIRCRI正在进行的研究活动。 缓解腐蚀,CO 2捕获,生物传感器,绿色氢的产生,电池回收,稀有地球的熔融盐技术等,朝Viksit Bharat - 我们Hon'ble总理和CSIR总裁Shri的远见卓识。 Narendra Modi。Padma Bhushan博士V.K.萨拉斯瓦特(saraswat),尼蒂·阿亚格(Niti Aayog)的Hon'ble成员,新德里(Nati Aayog)担任首席嘉宾,并在卡拉库迪(Karaikudi)的Csircecri举行了基础演讲。之前,CSIR-Cecri主任K. Ramesha博士欢迎八月的聚会。在他的欢迎讲话中,他简要概述了CSIR-Cecri于1948年成立以来的历史发展,并回顾了伟大的有远见的RM博士的努力。Alagappa Chettiar负责在Karaikudi建立这项主要的研究实验室。他还强调了各种研究领域的CSIRCRI正在进行的研究活动。缓解腐蚀,CO 2捕获,生物传感器,绿色氢的产生,电池回收,稀有地球的熔融盐技术等,朝Viksit Bharat - 我们Hon'ble总理和CSIR总裁Shri的远见卓识。Narendra Modi。
电动流动性和仅在印度过渡
印度的EV生态系统似乎处于最早的阶段。这是一个多元化且快速发展的相互关联组件的框架,支持采用电动汽车,制造和使用。该生态系统包括一系列利益相关者,技术和基础设施组成部分,所有这些都为e-Mobility行业的增长和可持续性的关键部分做出了贡献。印度EV生态系统由六个相关参与者组成:政府和监管机构,制造商,金融家,电池技术和充电基础设施等组件供应商以及最终的消费者或用户。所有这些重要的利益相关者都必须合作,以提出可行的解决方案,以解决电动汽车过渡的关注。niti ayog,公路运输和高速公路,重工业和公共企业部以及其他人是积极主动的政府机构。

实施生物技术指南
Under the ambit of Biotech PRIDE Guidelines, this department has constituted the Inter-ministerial National Steering Committee (IMC) chaired by Secretary DBT, co-chaired by Secretary DHR & DG ICMR and Chairperson National Biodiversity Authority (NBA) and comprised of representatives from DSIR & CSIR, DST, DARE & ICAR, MeitY, MoHFW, MoES, MoEFCC, Niti Aayog,主要科学顾问的办公室和MHA,以及(由IMC最终确定)域专家。随后由IMC提出了EAC提交的草案。我们真诚地认识到EMC的建设性批评和建议及其在该文件中的最终建议。我们对记录表示感谢Shri秘书DBT Rajesh S. Gokhale博士。C. Achalender Reddy,NBA主席和IMC的所有成员的指导和贡献。
全面审查州 RPO 框架和法规
Prayas(健康、能源、学习和育儿倡议)是一家非政府、非营利组织,总部位于印度浦那。Prayas 的成员都是专业人士,致力于保护和促进公众利益,尤其是社会弱势群体的利益。Prayas(能源集团)致力于能源和电力行业的理论、概念、监管和政策问题。我们的活动包括政策和监管事务的研究和参与,以及对民间社会团体的培训、宣传和支持。Prayas(能源集团)作为各部委、监管委员会和计划委员会/NITI Aayog 组成的几个官方委员会的成员,为能源行业的政策制定做出了贡献。Prayas 在印度政府科技部科学和工业研究部注册为 SIRO(科学和工业研究组织)。

教育供应链中的人工智能和机器学习
不均匀的资金利用:NITI Aayog的学校教育质量指数(SEQI)2019年也暴露了基金利用率的州范围差异,该差异在55%至99%之间。通过使用数据分析和预测建模,可以预测准确性高的学校的需求,将资源分配给最需要它们的领域,并提高一般教育质量[4]。AI和ML对教育供应链管理的影响可以帮助减少印度长期以来供应的问题以提高教育质量。2。目标主要目标:检查诸如AI和ML之类的智能技术如何帮助决策以预测公立学校的需求。次要目标:a)评估教育机构中供应链管理的当前性质b)确定AI和ML在管理资源方面具有比较优势的领域
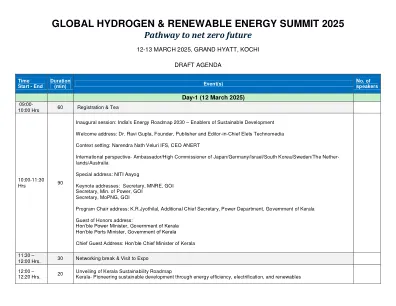
全球氢与可再生能源峰会2025
Inaugural session: India's Energy Roadmap 2030 – Enablers of Sustainable Development Welcome address: Dr. Ravi Gupta, Founder, Publisher and Editor-in-Chief Elets Technomedia Context setting: Narendra Nath Veluri IFS, CEO ANERT International perspective- Ambassador/High Commissioner of Japan/Germany/Israel/South Korea/Sweden/The Nether- lands/Australia Special address: NITI Aayog主题演讲:秘书,MNRE,GOI秘书,最低。Power,GOI秘书,Mopng,GOI计划主席地址:K.R.Jyothilal,其他首席秘书,电力部,喀拉拉邦政府荣誉嘉宾政府地址:喀拉拉邦政府,喀拉拉邦政府,喀拉拉邦政府部长
5fd27-二月-2024.pdf
3.10.6. 证券上诉法庭(SAT) _________ 47 3.10.7. 统一支付接口(UPI) ___________ 47 3.10.8. 香料和烹饪用草药法典委员会(CCSCH) _____________________________________ 47 3.10.9. 关于改造公平价格商店的报告 ____ 48 3.10.10. 印度的粮食储存系统 ________ 48 3.10.11. 内阁批准 NLM 中的额外活动 49 3.10.12. PMFBY 下的举措 _________________ 49 3.10.13. 年度行业调查(ASI) __________ 50 3.10.14. Sangam:数字孪生计划 ____________ 50 3.10.15.数字创作者经济 ________________ 51 3.10.16. 投入服务分配 (ISD) ___________ 52 3.10.17. 宣布三条新的主要铁路走廊 ____________________________________________ 52 3.10.18. NITI Aayog 关于液化天然气作为运输燃料的报告 ________________________________________ 52 3.10.19. 勘误表 _______________________________ 53 4. 安全 _____________________________ 54

高级证书课程 - 商业人工智能
Ashish 拥有超过 27 年的经验,在中东、非洲和南亚地区建立绿地技术驱动型金融服务企业。他的经验横跨创业、工业和政策制定。他曾担任 NITI Aayog 发展监测和评估办公室 (DMEO) 的监测和评估主任,负责监测所有贸易融资和商务部的 M&E 计划。他负责 TIME 实验室(监测和评估技术和创新)的工作,并为州政府提供监测和评估培训。他曾在多个组织的不同领域工作过,包括数字支付、无分行银行、数字贷款和小额信贷机构,曾在 Jumo、Aditya Birla Group、摩托罗拉、First Rand Bank 和 Comviva 等组织工作。