XiaoMi-AI文件搜索系统
World File Search Systemnumbers


模型,数字和案例
国际关系的研究试图解释各国,社会和组织之间的各种政治互动。是研究战争与和平,还是探索经济合作或环境关系,国际政治的研究都需要一种系统的方法来识别基本过程和变化的力量。响应于过去几十年来国际体系的经济相互依存和其他深刻变化的响应,对国际关系的分析(IR)已朝着三个主要方向扩展。首先,学者们解决了新问题,包括国际环境政治,国际伦理和全球化。第二,出现了新方法(例如,两级游戏分析和空间分析),方法范围已扩大,以包括更多地使用理性选择模型和统计方法。第三,学者在各自的子及其使用各种方法方面都变得越来越专业。这些事态发展无疑通过注意其他研究领域(例如遵守国际条约和内战的解释),以及改变研究人员如何分析这些主题来丰富IR研究。同时,新研究主题,更大的方法论多样性和增加的子领域专业化的结合已经超出了IR学者的共同方法论问题。虽然有关研究方法的一般课程现在是高级本科和研究生LEV-
伊利诺伊州的数字影响
2023标志着公路学者发言人25周年。该计划允许伊利诺伊州的作家,讲故事的人,历史学家,民俗学家,音乐家和生活历史演员通过在图书馆,文化中心,博物馆和其他本来无法接待这些世界一流的演讲者的图书馆,文化中心,博物馆和其他场所分享他们的专业知识和热情。


2024按数字-NYC
为了帮助指导我的工作,我的办公室密切关注居民对这些问题的评价。今年,我们收到了10,075条有关问题和尚待立法的评论。电话和电子评论的首要问题是当地道路的状况,Ossining和Briarcliff的9A公路再次获得了我们收到最多投诉的道路的可疑区别。我希望,一旦重新准备工作完成,关于这条道路的投诉将在2025年有所减少。(说到哪个:那些在该地区旅行的人应该注意到绕道现在已经结束,在春季恢复。一旦重新启动,弯路将从每天晚上在车道上工作。)
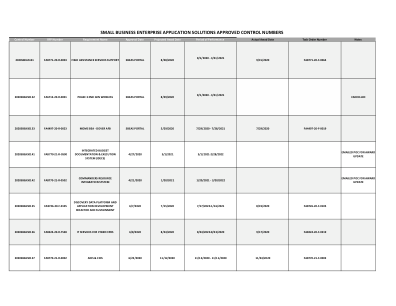
SBEAS 控制编号 FY20_23JUL21_VENDORS.xlsx
2020SBEAS0135 FA8726-20-F-0105 发现数据平台和应用程序开发重构与维护 2020 年 6 月 7 日 2020 年 7 月 15 日 2020 年 7 月 17 日-2021 年 1 月 16 日 2020 年 8 月 19 日 FA8726-20-F-0105
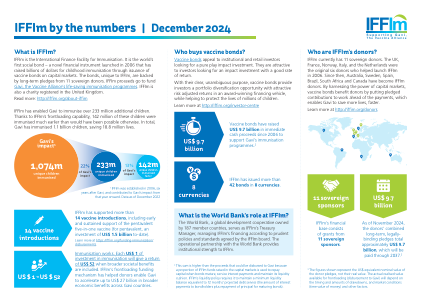
IFFIm 数据 | 2024 年 12 月
IFFIm 是国际免疫融资机制。它是世界上第一只社会债券,是一种于 2006 年推出的新型金融工具,通过在资本市场发行疫苗债券,为儿童免疫筹集了数十亿美元。这些债券是 IFFIm 独有的,由 11 个主权捐助国的长期承诺支持。IFFIm 的收益将用于资助疫苗联盟的救命免疫计划 Gavi。IFFIm 也是在英国注册的慈善机构。