XiaoMi-AI文件搜索系统
World File Search Systemnyquist
航空航天工程系
导航的几何概念、参考框架、坐标变换、变换方法比较。惯性传感器、惯性导航系统-机械化、外部辅助导航、组合导航。模块 4:制导简介(7 个讲座小时)导弹制导律;制导律的分类;经典制导律;现代制导律、自动驾驶仪 - 纵向、横向和导弹。模块 5:控制简介(8 个讲座小时)控制系统简介开环和闭环控制系统-传递函数极点和零点-框图简化-信号流图-梅森增益公式模块 6:系统稳定性(9 个讲座小时)特征方程-稳定性概念-劳斯稳定性标准根轨迹。经典线性时不变控制系统。稳定性;时域特性。航空航天系统的 PID 控制器设计。频域特性、奈奎斯特和波特图及其在航空航天系统控制器设计中的应用。教科书:

2023年12月29日
研究和出版物强调,很难从我们一个或多个人中发挥作用的所有手稿中挑选。没有降低其他任何一个的重要性,这里有4个与我们的转诊医生(无特殊顺序☺)1。Thomas C,Chandel A,King CS,Aryal S,Brown AW,Khangoora V,Nyquist A,Singhal A,Cantres Fonseca O,Shlobin O,Nathan SD。肺部19例相关肺部疾病患者肺动脉高压的患病率是肺移植:UNOS注册分析。Pulm Circ。 2023 APR 1; 13(2):E12228。 doi:10.1002/pul2.12228。 Ecollection 2023 Apr. PMID:37091120与我们小组在第3 pH值中的领导作用保持一致,在这项研究中,我们描述了弥漫性实质肺疾病的另一个原因与肺动脉高压的发展有关。 毫不奇怪的是,Covid-Ild也做到了!Pulm Circ。2023 APR 1; 13(2):E12228。doi:10.1002/pul2.12228。Ecollection 2023 Apr.PMID:37091120与我们小组在第3 pH值中的领导作用保持一致,在这项研究中,我们描述了弥漫性实质肺疾病的另一个原因与肺动脉高压的发展有关。毫不奇怪的是,Covid-Ild也做到了!
航空航天工程系
导航的几何概念、参考框架、坐标变换、变换方法比较。惯性传感器、惯性导航系统-机械化、外部辅助导航、组合导航。模块 4:制导简介(7 个讲座小时)导弹制导律;制导律的分类;经典制导律;现代制导律、自动驾驶仪 - 纵向、横向和导弹。模块 5:控制简介(8 个讲座小时)控制系统简介开环和闭环控制系统-传递函数极点和零点-框图简化-信号流图-梅森增益公式模块 6:系统稳定性(9 个讲座小时)特征方程-稳定性概念-劳斯稳定性标准根轨迹。经典线性时不变控制系统。稳定性;时域特性。航空航天系统的 PID 控制器设计。频域特性、奈奎斯特和波特图及其在航空航天系统控制器设计中的应用。教科书:
机械工程学硕士
MEEG 5301反馈和控制系统3学分本课程强调使用经典和州空间方法的封闭环控制系统的分析和综合,重点是电力机械系统。数学要求包括求解微分方程,矩阵代数和基本复杂变量的拉普拉斯变换方法。The discussion of classical control system design includes the modeling of dynamic systems, block diagram representation, time and frequency domain methods, transient and steady state response, stability criteria, controller action [Proportional (P), proportional and integral (PI), Proportional, integral and derivative (PID) and pseudo- derivatives feedback], root locus methods, the methods of Nyquist and Bode and dynamics compensation技术。对状态空间方法的讨论包括状态方程和杆位设计的公式和解决方案(分析和计算机)。该课程整合了计算机辅助分析和设计工具(MATLAB)的使用,以确保使用案例研究和对电气和机械系统的案例研究和应用与现实世界控制的电力系统的设计相关。包括对PID控制系统的动手实验室(基于硬件)的探索。本科等效:ENGR 4301。以前我0400。

分区 Ohtomo 稳定性测试可有效分析大型...
摘要 电子电路设计中的一个基本步骤是验证它们至少在给定的一组外部终端上是稳定的,以避免在实践中无法观察到所找到的解决方案。这在微波和毫米波电路中尤其如此,因为它们通常在频域而不是时域中进行分析。因此,无论是在线性还是大信号情况下,都可能发现不稳定的解而不是可观察到的解。不幸的是,与线性情况相比,大信号解的稳定性分析要麻烦得多。特别是,虽然可以将基于奈奎斯特原理的小信号测试转化为大信号等效测试,但代价是矩阵大小显著增加。然而,对于最近才应用于大信号解决方案的 Ohtomo 测试,可以利用问题的结构来显著降低复杂性,从而缩短模拟时间。选择一个真实世界的平衡放大器来验证所提出的方法并说明其实际用途。本文还介绍了该方法在具有大量器件的实际单片电路中的应用。

考试问题机器人技术和人工智能
1。控制系统设计。控制系统和系统配置的基本组件。2。系统的标准数学模型:输入输出模型,状态空间模型。3。动态系统线性化,并评估雅各布基质。4。框图转换:系列,并行和反馈连接。5。系统的结构特性:可控性和可观察性。6。一阶和二阶系统:传输功能,步骤响应,冲动响应。7。连续时间系统的稳定性:定义,S-平面根位置,Routh-Hurwitz稳定性标准。8。Lyapunov确定连续时间系统稳定性的方法。9。Nyquist稳定性标准。时间延迟系统的稳定性。10。系统的性能特征(规格):过冲,沉降时间,稳态误差,相对稳定性,阻尼比。11。稳态准确性。具有不同类型编号(集成数)的Unity反馈控制系统中的稳态错误。12。标准特征多项式:Butterworth多项式,二项式多项式。13。通过模态控制(POL放置)对线性系统的稳定。 14。 连续时间系统(Luenberger观察者)的全顺序和降低状态观察者。通过模态控制(POL放置)对线性系统的稳定。14。连续时间系统(Luenberger观察者)的全顺序和降低状态观察者。
基于单个 n 型半导体聚合物的光...
图 1. 使用三电极装置探测 n 型薄膜的光电化学特性。(a) p(C 6 NDI-T 的化学结构。(b) 在 PBS 中电化学掺杂过程中 ITO 涂层 p(C 6 NDI-T) 薄膜的吸光度光谱的变化。(c) 黑暗条件下在 PBS 中记录的 ap(C 6 NDI-T) 薄膜的循环伏安法 (CV) 曲线。该薄膜涂在圆形微电极上 (A = 0.196 mm 2 )。扫描速率为 50 mV/s。箭头表示扫描方向,并标记还原峰。(d) 在 OCP 条件下测得的 p(C 6 NDI-T) 电极在黑暗(黑色)和暴露于红光(660 nm,406 mW/cm 2 )时的奈奎斯特图。插图突出显示了高频下的阻抗曲线。 (e) 顶部:浸没在电解质中的薄膜与光相互作用的示意图(红色箭头)。光形成激子(移动的电子-空穴对),一些激子分解为自由电荷载体。底部:在 t= 0 分钟时开启红光照射(660 nm,406 mW/cm 2 )约 2 分钟后,聚合物电极的 OCP 变化。
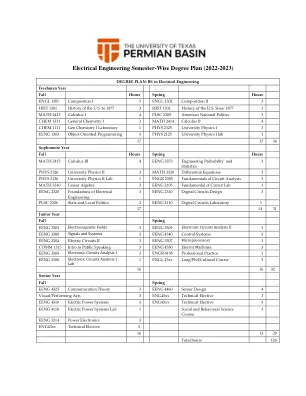
电气工程学期学位计划(2022-...
EENG 4335 直接发电方法 (3-0) 考虑不使用通常的电动机将能量直接转换为电能。研究不同形式的能量存储。考虑的技术包括太阳能电池板、热传递、化学和燃料电池。先决条件:ENGR 2305。EENG 4340 控制系统 (3-0) 控制系统简介、系统建模、状态变量分析、反馈控制和性能、稳定性、根轨迹、奈奎斯特图和伯德图、系统频率响应。介绍计算机作为控制系统设计和分析的模拟工具。先决条件:MATH 3320、EENG 3380。EENG 4380 电气工程中的特殊主题 (3-0) 偶尔提供特殊主题作为电气工程课程,作为高级选修课。先决条件:由讲师指定 EECS 4391 电气工程独立学习 (3-0) 讲师指定和指导的电气工程独立学习课程。工作或学习应相当于每周平均 3 小时的学生努力。需要提交最终报告。先决条件:高级资格和讲师同意

可解释人工智能(XAI)驱动的振动传感方案,用于智能表面磨削过程中的表面质量监测
局部可解释和模型无关解释 (LIME) 是一种可解释的人工智能 (XAI) 方法,用于识别智能磨削过程中预测平均表面粗糙度 (Ra) 的全局重要时频带。智能磨削装置包括一台 Supertech CNC 精密表面磨床,配备一个 Dytran 压电加速度计,沿切线方向 (Y 轴) 安装在尾座主轴上。每次磨削时,都会捕获振动特征,并使用 Mahr Marsurf M300C 便携式表面粗糙度轮廓仪记录地面真实表面粗糙度值。在整个实验中,粗糙度值范围为 0.06 至 0.14 微米。提取磨削过程中收集的每个振动信号的时间频域频谱图帧。建模卷积神经网络 (CNN) 以基于这些频谱图帧及其图像增强来预测表面粗糙度。最佳 CNN 模型能够预测粗糙度值,总体 R2 分数为 0.95,训练 R2 分数为 0.99,测试 R2 分数为 0.81,仅使用 80 组振动信号(对应 4 次实验,每次 20 次试验)。虽然数据量不足以保证在现实场景中达到这样的性能指标,但可以提取这些复杂的深度学习模型捕获的关系背后的统计一致的解释。在开发的表面粗糙度 CNN 模型上实施了 LIME 方法,以识别影响预测的重要时频带(即频谱图的超像素)。基于在频谱图帧上确定的重要区域,确定了影响表面粗糙度预测的相应频率特性。基于 LIME 结果的重要频率范围约为 11.7 至 19.1 kHz。通过基于重要频率范围并考虑奈奎斯特标准将采样率从 160 kHz 降低到 30、20、10 和 5 kHz,证明了 XAI 的强大功能。通过仅提取低于其相应奈奎斯特截止值的时间频率内容,为这些范围开发了单独的 CNN 模型。通过比较模型性能提出了一种适当的数据采集策略,以论证选择足够的采样率来成功且稳健地捕捉磨削过程。© 2023 制造工程师协会 (SME)。由 Elsevier Ltd. 出版。保留所有权利。这是一篇根据 CC BY-NC-ND 许可开放获取的文章(http://creativecommons.org/licenses/by-nc-nd/4.0/)由 NAMRI/SME 科学委员会负责同行评审。关键词:卷积神经网络;可解释机器学习;XML;可解释人工智能;XAI;局部可解释和模型无关解释;LIME;表面粗糙度;表面磨削;光谱图
9-12岁的HPV疫苗接种
1。Pingali C,Yankey D,Elam-Evans LD等。国家,地区,州和选定的地方疫苗接种覆盖范围13-17岁 - 美国,2020年。MMWR Morb Mortal WklyRep。2021; 70(35):1183-1190。2。Bednarczyk RA,Ellingson MK,Omer SB。13岁和15岁之前的人类乳头瘤病毒疫苗接种:国家免疫分析青少年数据。J感染。2019; 220(5):730-734。 3。 Assurance NCFQ。 对青少年的免疫接种(IMA)。 https://www.ncqa.org/hedis/ superies/Immunizations-for-adecents/。 出版了2021年。 2022年2月10日访问。 4。 美国癌症学会。 防止6种癌症使用HPV疫苗。 https:// www。 cancer.org/healthy/hpv-vaccine.html。 出版了2022年。 2022年2月10日访问。 5。 O'Leary S,Nyquist A. 为什么AAP建议尽早启动HPV疫苗接种。 https://publications.aap.org/aapnews/news/14942。 出版2019年。 2019年10月4日更新。 2022年2月10日访问。 6。 Markowitz LE,Dunne EF,Saraiya M等。 人类乳头瘤病毒疫苗接种:免疫实践咨询委员会的建议(ACIP)。 MMWR推荐销售代表2014; 63(RR-05):1-30。 7。 Petrosky E,Bocchini JA,Jr。,Hariri S等。 MMWR Morb Mortal WklyRep。2015; 64(11):300-304。 8。 Dobson SR,McNeil S,Dionne M等。 JAMA。2019; 220(5):730-734。3。Assurance NCFQ。对青少年的免疫接种(IMA)。https://www.ncqa.org/hedis/ superies/Immunizations-for-adecents/。出版了2021年。2022年2月10日访问。4。美国癌症学会。防止6种癌症使用HPV疫苗。https:// www。cancer.org/healthy/hpv-vaccine.html。出版了2022年。2022年2月10日访问。5。O'Leary S,Nyquist A.为什么AAP建议尽早启动HPV疫苗接种。https://publications.aap.org/aapnews/news/14942。出版2019年。2019年10月4日更新。2022年2月10日访问。6。Markowitz LE,Dunne EF,Saraiya M等。人类乳头瘤病毒疫苗接种:免疫实践咨询委员会的建议(ACIP)。MMWR推荐销售代表2014; 63(RR-05):1-30。7。Petrosky E,Bocchini JA,Jr。,Hariri S等。MMWR Morb Mortal WklyRep。2015; 64(11):300-304。 8。 Dobson SR,McNeil S,Dionne M等。 JAMA。MMWR Morb Mortal WklyRep。2015; 64(11):300-304。8。Dobson SR,McNeil S,Dionne M等。 JAMA。Dobson SR,McNeil S,Dionne M等。JAMA。JAMA。使用9值人乳头瘤病毒(HPV)疫苗:免疫实践咨询委员会更新的HPV疫苗接种建议。年轻青少年中2剂HPV疫苗的免疫原性与年轻女性中的3剂:一项随机临床试验。2013; 309(17):1793-1802。2013; 309(17):1793-1802。