XiaoMi-AI文件搜索系统
World File Search Systemonc

2024 年 11 月 25 日 Wafik S. El-Deiry 医学博士、哲学博士、FACP
家庭住址:1 Nayatt Point Court Barrington, RI 02806 永久地址:793 Darby Paoli Road Bryn Mawr, PA 19010 手机:(610) 800-2443 学术办公室:布朗大学布朗阿尔珀特医学院病理学和实验室医学系 70 Ship Street, Providence, Rhode Island 02903 临床办公室:医学部血液学-肿瘤学分部 George Bldg Rm 302(血液学/肿瘤学分部主任办公套房)罗德岛医院 Lifespan 癌症研究所 593 Eddy Street, Providence, Rhode Island 02903 电子邮件地址:wafik.eldeiry@gmail.com;wafik@brown.edu 出生日期:1961 年 1 月 23 日 婚姻状况:已婚,Evelyn; 4 个孩子:詹姆斯 24 岁、约翰 21 岁、詹妮弗 21 岁(残疾)、朱莉 19 岁 教育程度:1978 年 8 月 - 1981 年 5 月 迈阿密大学理学学士(化学)1981 年 6 月 - 1987 年 6 月 迈阿密大学医学院医学博士1981 年 6 月 - 1987 年 6 月 博士迈阿密大学医学院(生物化学) 研究生培训和进修职位: 1987 年 7 月至 1988 年 6 月 Osler 实习生,约翰·霍普金斯医院医学部,马里兰州巴尔的摩市 1988 年 6 月至 1990 年 6 月 医学初级和高级助理住院医师,约翰·霍普金斯医院,马里兰州巴尔的摩市 1990 年 6 月至 1994 年 6 月 医学肿瘤学高级临床研究员,约翰·霍普金斯肿瘤中心,马里兰州巴尔的摩市 1991 年 6 月至 1994 年 6 月 博士后研究员(Bert Vogelstein 博士的实验室),约翰·霍普金斯肿瘤中心,马里兰州巴尔的摩市 兵役:无 教职任命: 1994 年 7 月至 1999 年 6 月 医学助理教授(血液/肿瘤学),宾夕法尼亚大学 1995 年 1 月至 12 月宾夕法尼亚大学 1/98-8/04 霍华德·休斯医学研究所助理研究员 2/99-6/99 宾夕法尼亚大学药理学助理教授(兼职) 7/99-6/05 宾夕法尼亚大学医学系、血液学/肿瘤学部医学副教授(终身教授)
2024年6月
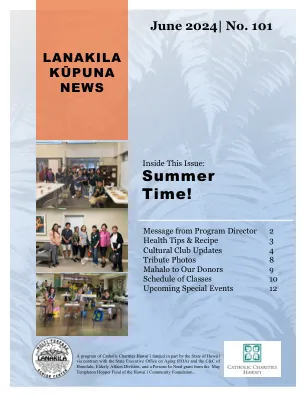
5月9日:谢谢您的成员,Phil Uyehara和Giselle Miyashiro邀请您的个人健身教练Kaizen F.I.T.N.E.S.S.的Jedd Ramos花时间并教我们的会员。根据杰德(Jedd)的说法,健康且适合健康永远不会太晚,可以在1街之前长寿,保持活跃,做家务,院子工作和其他活动。2和您吃的食物应该是基本的,而不是垃圾食品。3 rd,您需要像我们的ONC Group这样的有意义的关系,以便彼此在一起并共同做朋友。在做任何事情之前要做的第一件事就是通过鼻子呼吸,这非常重要。80%的人通过他们的嘴呼吸,这是未经过滤的,您最终会咳嗽,冷,倾向于睡觉时打sn。通过鼻子呼吸,使过滤湿润的空气湿润。重要的是要通过鼻子呼吸,握住它,然后再呼吸,然后正常呼吸。移动性很重要!您首先需要温暖身体,这样您就不会受伤。要保持坚固且稳定,您需要建立核心,这是从大腿中部到上胸部区域的。杰德教会了我们从手指到脚趾的许多伸展。我们在这些练习过程中做了适当的呼吸。正确的呼吸愉快并学习以在我们的核心中增强力量。5月16日:母亲节庆祝活动与Tamagusuku Ryu Senju Kai&Frances Nakachi Senseis舞蹈学院,该学院的遗产范围超过27年。目前她的学生年轻3-83岁。这是一个很棒的感人节目。,让Nakachi Sensei和她的学生们以其美丽的服装,传统和民间舞蹈为我们娱乐我们总是很不错的时机。他们结束了他们的出色计划,成员做“ kachashi”,然后在母亲节中向所有人分发小吃。5月23日:阵亡将士纪念日庆祝活动,以记住我们去年去年去世的所有LMPSC成员。家人,朋友和成员聚集在一起以纪念他们的亲人和特殊死者。被称为死者的名字,为了纪念亲人而将家人和朋友放在正面的花瓶中。每个文化俱乐部主席或代表也向他们的尊敬表示敬意,并由这位白人妈妈的演讲,其次是所有其他在那里的成员。成员的精美花卉布置为房间增光添彩。umaribi-kariyushi yaibii-n(生日快乐)至:蒙娜·贝纳多,埃尔米纳·伊玛村,Yoshiko kumura,Teresa Sasaki,Teresa Sasaki,Mildred Suzuki,Frank Toma,Yoneko Tsuchiyama tsuchiyama&Jeanette Yamane and Yamane Yamane Yamane Yamane Yamane

事先授权选项 事先授权列表
CPT 代码 描述 商业 MHT 医疗保险 自筹资金 备注 0017M ONC DLBCL MRNA 20 基因 ALG THP THP THP THP 0018M TRNSPLJ RNL RJCTN MEAS CD154+T CLL WHL PRPH BLD THP THP THP THP 0042T 脑灌注分析 CT W/血流和容量 eC eC eC 无需授权 0073T 基于补偿器的光束调制 TX 3/MORE HI RES THP THP THP THP 0095T RMVL TOT DISC ARTHRP ANT APPR CRV EA NTRSPC eC eC eC THP 0098T REVJ TOT DISC ARTHRP ANT APPR CRV EA NTRSPC eC eC eC THP 0163T TOT DISC ARTHRP ANT APPR DSKC PREP LMBR EA eC eC eC THP 0164T RMVL TOT DISC ARTHRP ANT APPR LMBR EA NTRSPC eC eC eC THP 0165T REVJ TOT DISC ARTHRP ANT APPR LMBR EA NTRSPC eC eC eC THP 0191T ANT 段插入排水管(无水箱)INT THP THP THP THP 0197T 分次内本地和跟踪 THP THP THP THP 0213T NJX DX/THER PARAVER FCT JT W/US CER/THOR 1 LVL eC eC eC 无需授权 0214T NJX DX/THER PARAVER FCT JT W/US CER/THOR 2ND LVL eC eC eC 无需认证 0215T NJX PARAVERTBRL FACET JT W/US CER/THOR 3RD&> LVL eC eC eC 无需认证 0216T NJX DX/THER PARAVER FCT JT W/US LUMB/SAC 1 LVL eC eC eC 无需认证 0217T NJX DX/THER PARAVER FCT JT W/US LUMB/SAC LVL 2 eC eC eC 无需认证 0218T NJX PARAVERTBRL FCT JT W/US LUMB/SAC 3RD&> LVL eC eC eC 无需认证 0228T NJX ANES/STEROID TFRML EDRL W/US CER/THOR 1 LVL eC eC eC 无需认证 0229T NJX ANES/STERD TFRML EDRL W/US CER/THOR EA ADDL eC eC eC 无需授权 0230T NJX ANES/STEROID TFRML EDRL W/US LUM/SAC 1 LVL eC eC eC 无需授权 0231T NJX ANES/STEROID TFRML EDRL W/US LUM/SAC EA ADDL eC eC eC 无需授权 0274T PERC LAMINO-/LAMINECTOMY IMAGE GUIDE CERV/THORAC eC eC eC THP 0275T PERC LAMINO-/LAMINECTOMY INDIR IMAG GUIDE LUMBAR eC eC eC THP 0312T LAPS IMPLTJ NSTIM ELTRD ARRAY&PLS GEN VAGUS NRV THP THP THP THP 0316T 更换脉冲发生器迷走神经 THP THP THP THP 0331T MYOCRD 交感神经 INNERVAJ IMG PLNR QUAL&QUANT eC eC eC THP 0332T MYOCRD SYMP INNERVAJ IMG PLNR QUAL&QUANT W/SPECT eC eC eC THP