XiaoMi-AI文件搜索系统
World File Search Systemonce
医学通过几十年来发生的小小的变化取得了进步。但是每隔一段时间,范式转变会改变医生
这一过程始于2023年6月,当时在Hon'ble Raksha Mantri的面前,在Mod举行了Chintan Shivir。在上述会议上,DGAFM提出了计算医学中心的想法,并由Hon'ble RM审查。AFMS官员在人工智能/机器学习/图像分析领域具有专业知识的官员被派往2023年7月的AFMC Pune,持续11天。在这11天中,两名官员与AFMC学院举行了重密集性的头脑风暴会议,并提出了愿景,任务,目标(长期和短期),详细的案件陈述,具有暂时的预算,以及阶段的可交付成果清单。带有预算的SOC已转发给O/O DGAFMS,并于2023年8月2日到达。该中心的名称是“ Prajna-计算医学中心”(AFCCM)。之后,准备基础架构和人力要求以及详细的成本分析并发送到O/O DGAFM。第一阶段的预算于2023年9月分配。
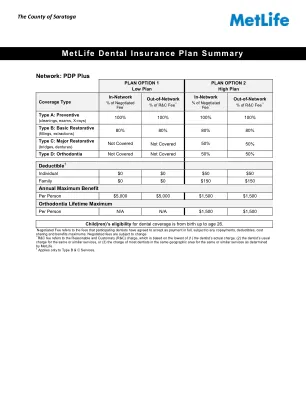
大都会人寿牙科保险计划摘要
Fillings Replacement once every 24 months Fillings Replacement once every 24 months Simple Extractions Simple Extractions Oral Surgery Oral Surgery Endodontics Root canal treatment limited to once per tooth Endodontics Root canal treatment limited to once per tooth General Anesthesia When dentally necessary in connection with oral surgery, extractions or other covered dental services General Anesthesia When dentally necessary in connection with oral surgery,提取或其他覆盖的牙科服务牙周化未覆盖的牙周牙周缩放量表和每象限一次,每24个月一次每象限一次牙周手术一次,每36个月每36个月牙周维护处理的总数不能超过3个日历年度的3个治疗方法。每颗牙齿一次一次。太空维护者直到他/她14岁生日之前,为抚养儿童的空间维护者。每颗牙齿一次一次。密封剂未覆盖密封剂每60个月,每60个月的密封胶材料每60个月使用一个未遗忘的,未固定的1 st和2 nd摩尔,直到他/她的16个生日皇冠,牙齿和桥梁维修/恢复

postgresql / postgis到ROS2桥的空间数据< / div>
• Architecture allow easy extension to additional (non-standard) messages • Publish messages that contain all rows at once: • Derive from StampedTopicParser • E.g., PointCloud2 • Publish message row-by-row: • Derive from SingleElementParser • E.g., PointStamped , Pose
NIST NCCOE迁移到PQC项目
• Cryptographic Algorithm Validation Program • Automated Cryptographic Validation Testing System (ACVTS) https://csrc.nist.gov/projects/cryptographic-algorithm-validation- program/how-to-access-acvts • Demo testing for draft algorithm standards to enable production/official testing once the standards are finalized https://github.com/usnistgov/acvp-server•FIPS 140与CMUF
2020-2021高等教育的流感疫苗表现
Once enrollment is complete • Contact will receive an invitation to order vaccine • May request up to 500 doses per order • May place multiple orders • Initial orders will be filled on a first come, first served basis • Subsequent orders will be filled as vaccine availability allows • Needles and syringes are NOT included

新闻通讯
Shaochen Zhong, Duy Le, Zirui Liu, Zhimeng Jiang, Andrew Ye, Jiamu Zhang, Jiayi Yuan, Kaixiong Zhou, Kaixiong Zhou, Zhaozhuo Xu, Jing Ma, Shuai Xu, Vipin Chaudhary and Xia Hu, “GNNs Also Deserve Editing, and They Need It More Than Once”, Forty-first International Conference on Machine Learning (ICML), Vienna, Austria, July 21, 2024

工业AI手册中的MTECH 2025
a part of the MTech project IITM will do intermediate reviews of the project work on agreed milestones and provide feedback to do course correction Once project work is completed by the candidate within stipulated agreed timelines, IITM shall evaluate and provide an appropriate grade for project work In case guidance/facilities are required from IITM for the project, it will be covered under a separate agreement on a case-by-case basis with the concerned faculty
SEC-00256 Pinellas工厂技术概述
Target material deposited as vapor onto ceramic or metal target substrate Targets loaded in the neutron tubes Neutron tubes then attached to glass manifold vacuum system under exhaust hood Once the system reached vacuum, storage beds were heated to flood the system with deuterium or tritium gas A torch was used to melt the glass manifold connection, seal the neutron tubes, and cut them free of the歧管
国内商业船只安全警报
o High voltage shocks o Direct jet flames o Fires develop in intensity quickly and rapidly reach their maximum intensity (typically within 2-3 minutes) o Toxic gases o Gas explosion (if the released gas accumulates for a while before being ignited) o Long lasting re-ignition risk (can ignite or re-ignite weeks, or maybe months after the provoking incident) o Once established fires are difficult to stop/extinguish o Thermal runaway