XiaoMi-AI文件搜索系统
World File Search Systemoperator
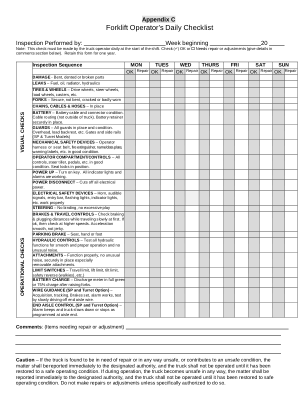
叉车操作员的每日检查表
注释:(需要维修或调整的项目)注意 – 如果发现卡车需要维修或以任何方式不安全,或导致不安全状况,应立即向指定机构报告此事,卡车在恢复到安全运行状态之前不得操作。如果在操作过程中,卡车以任何方式变得不安全,应立即向指定机构报告此事,卡车在恢复到安全运行状态之前不得操作。除非获得特别授权,否则请勿进行维修或调整。
算子学习:算法、分析与应用
▶ 与 Bhattacharya、Hosseini、Kovachki [1] 合作(PCA 网络) ▶ 与 Li、Kovachki、Azizzadenesheli、Liu、Bhattacharya、Anandkumar [19, 10] 合作(FNO) ▶ 与 Lanthaler、Li [14] 合作(通用近似) ▶ 与 Lanthaler [17] 合作(近似的复杂性) ▶ 与 Lanthaler、Trautner [18] 合作(有限维实现) ▶ 与 Lanthaler、Kovachki [11] 合作(评论) ▶ Kovachki [12] 合作(机器学习和科学计算)

视觉注意力与操作员绩效相关...
手动控制航天器与空间站对接是一种高度安全的操作。3,9 对接成功取决于控制具有 6 个自由度 (DoF) 的物体的能力。航天器可以沿三个平移轴导航并绕每个轴旋转,这对认知功能、运动控制和视觉注意力提出了巨大挑战。6df 训练工具已被引入以帮助操作员获得并保持自主控制 6 DoF 的技能。16,17 软件由 SpaceBit GmbH(德国埃伯斯瓦尔德)开发,手动控制器由 Koralewski Industrie-Elektronik oHG(德国汉布伦)开发,作为德国航空航天中心 (DLR) 的研究工具,用于研究基于俄罗斯 TORU 手动对接平台的运行性能。为了进一步提高学习效率和对接可靠性,有关底层信息处理的更多信息将是有益的。
航空运营商航班调度指南
本航空运营商指南包含与飞行调度员相关的标准、政策和程序。飞行调度指南的内容不应被视为取代以下文件中的任何说明:飞机手册;CAR;ANO。规则和条例、AIP;AlC;FOI 手册;标准通告;航空公司运营手册。
无线电操作员手册 - GlobalSecurity.org
无线电波的频率是一秒钟内发生的完整周期数。周期越长,波长越长,频率越低。周期越短,波长越短,频率越高。频率以赫兹 (Hz) 为单位进行测量和表示。每秒一个周期表示为 1 赫兹。由于无线电波的频率非常高,因此通常以千赫兹 (千赫 [KHz]) 或百万赫兹 (兆赫 [MHz]) 为单位进行测量和表示。1 KHz 等于每秒 1,000 个周期,1 MHz 等于每秒一百万个周期。有时频率以十亿赫兹 (千兆赫 [GHz]) 表示。1 GHz 等于每秒十亿个周期。
操作手册 - 法国古野
1.22 测量两个目标之间的距离和方位.....................................................................................1-38 1.23 目标警报....................................................................................................................1-39 1.23.1 如何设置目标警报........................................................................................1-39 1.23.2 确认目标警报.............................................................................................1-40 1.23.3 取消目标警报.............................................................................................1-40 1.23.4 目标警报属性.............................................................................................1-41 1.24 使显示偏离中心.............................................................................................1-42 1.25 干扰抑制器.............................................................................................................1-43 1.26 回波拉伸.............................................................................................................1-43 1.27 回波平均.............................................................................................................1-44 1.28 噪声抑制器.............................................................................................................1-45 1.29 雨刮器................................................................................................................1-46 1.30 Ta

致力于 DIY - 处理厂操作员
研究表明,有些人害怕公开演讲甚至甚于害怕死亡。对于许多水和废水处理操作员来说,执照考试几乎会产生这种程度的焦虑。有些人会证实,他们有可能彻底了解考试内容,但却因为过度紧张而考试不及格。幸运的是,有办法克服考试焦虑,消除考试及格的障碍。以下是我从自己的经验和一些研究中总结出的一些技巧。紧张可以对你有利。我得到的最好的建议之一是一位大学辅导员在面试前给我打气时说的。他说:“如果你不紧张,你就无法振作起来。”当然,过于焦虑会伤害你,但过于随意也会伤害你。适当的紧张可以帮助你发挥出最佳水平。所以,接受那更快的心跳和肾上腺素吧——让它们为你服务。做好准备——但不要太多。自信是缓解焦虑的良药,而自信来自充分的准备。另一方面,在考试前一天晚上“临时抱佛脚”地复习并不是一个好主意。如果你在考场上坐下时睡眠不足,你的表现就不会很好。长期坚持学习。当你知道自己准备好了时再参加考试。这样你就不会觉得非要临时抱佛脚不可。多练习。在大学毕业后的考试中,有一件事对我帮助很大,那就是回答练习题。你不仅要了解材料,还要知道问题会如何发展,这样才能获得优势。

IFS MaintenixTM 操作员版 - Microsoft
具体到维护、维修和大修 (MRO) 功能,这需要一个智能的信息和流程网络协同工作,以确保快速高效地完成所有计划内和计划外的维护,从而最大限度地减少对飞行运营的干扰,提高调度可靠性,并保持整个机队的适航性。此外,为实现这些严格的绩效目标而做出的努力必须以符合关键业务和法规合规性的方式进行。

分配系统操作员可行性研究...
GEO认识到在网格规划,基础设施和管理层中投资的重要性,最有效地实现了该州的气候法律。但是,从可行性研究草案中可以明显看出,设计和实施DSO实体需要大量资源和协作投资,而不是解决方案中所考虑的广泛利益相关者,以实现所需的成果。此外,虽然解决方案需要对特定DSO功能和角色进行分析,但从战略咨询的可行性研究草案中可以明显看出,这些功能和角色在DSO的背景下并不完全可以实现,甚至DSO绝对是偏好的实体,可以执行此类Reles。此外,也可以通过替代手段来实现DSO的某些角色或结果。基于这些因素,地理学认为,详细的DSO设计建议的发展为时过早。
操作员访问控制技术简介
在基础设施即服务 (IaaS) 和平台即服务 (PaaS) 云模型中,云服务提供商管理系统的子集,例如基础设施(云提供商租户),而客户管理系统的其他部分,例如虚拟机、应用程序和数据库(客户租户)。某些监管框架可能要求客户负责并控制任何人在访问系统时采取的操作,包括云提供商租户中的云提供商员工的操作。为了帮助客户满足这些要求,Oracle 客户可以将 Oracle 操作员访问控制 (OpCtl) 与 Exadata Cloud@Customer (ExaC@C) 和 ExaC@C 上的自治数据库专用 (ADB-D) 结合使用。