XiaoMi-AI文件搜索系统
World File Search Systemppi
预脉冲抑制(PPI)和与工作记忆的PPI相关性的重新测试可靠性
通过本研究,我们旨在确认PPI在人类中的重测可靠性,并评估其与不同预硫强度下的WM性能的相关性。我们发现高测试可靠性(ICC> .80)当我们跨不同的预硫水平以及考虑平均度量ICC时(即,如果试验数量增加一倍)。关于PPI与WM性能的相关性,我们发现PPI与N-BACK任务性能的显着正相关,但与CDT性能没有。此外,PPI与N-BACK的显着相关性对于2退和0后态条件都是显而易见的。因此,我们能够复制和扩展以前研究的发现,这些研究表明PPI与WM相关(例如csomor等,2008; Scholes&Martin-virson,2009年;

Zwitserleven PPI N.V. - Athora.nl
DC 和 PPI 市场呈现持续增长态势。多家 PPI 改变了市场股东。尽管受到新冠疫情影响,ZL PPI 市场份额在 2021 年仍保持强劲增长。2021 年,新养老金协议的轮廓变得更加清晰,PPI 完全有能力在新养老金市场中发挥重要作用。养老金改革应于 2023 年实施,并于 2027 年生效。立法内容和实施日期尚未最终确定。为了实现及时实施,2021 年已经做好了必要的准备,为 2022 年养老金协议的实施奠定了基础。由于即将出台的立法,我们看到雇主对更换养老金提供者持更加观望的态度。

PPI在儿科备忘录中处方 -
To: All Pharmacy Staff (Trust and ENHPharma), Paediatric Medical and Nursing Staff (Matron to escalate to A&E Paeds, Bluebell Ward, Bramble Day Unit and Day Surgery) From: Kiani Patel, Specialist Rotational Pharmacist and Lisa Summers, Lead Pharmacist Paediatrics Date: 18 July 2023 Subject: Changes to Proton Pump Inhibitor (PPI) Choices and Formulations for小儿患者兰索拉唑现在是信托中儿科患者使用的第一行PPI。应考虑每个患者的剂量,吞咽能力和给药途径,应选择特定的兰索拉唑配方。奥美拉唑在信托内的小儿患者中使用。请按照以下选项进行兰索拉唑的处方和管理:

阶梯疗法-质子泵抑制剂(PPI)
1. 背景:质子泵抑制剂 (PPI) 已获 FDA 批准用于治疗多种疾病,包括十二指肠溃疡、幽门螺杆菌相关十二指肠溃疡、胃溃疡、糜烂性食管炎、成人和儿童胃食管反流病 (GERD)、佐林格-埃利森综合征等高分泌疾病、GERD 相关喉炎,以及改善 CF 患者的胰酶吸收(非 FDA 批准的适应症)。阶梯疗法计划用于鼓励使用某些治疗类别的低成本替代方案。该计划要求会员先尝试低成本 PPI,然后才能获得 Nexium 悬浮液、Prevacid SoluTab* 和 Zegerid* 悬浮液的承保。对于 6 岁以下的患者,Nexium 混悬液和兰索拉唑口腔崩解片(通用 Prevacid SoluTabs)的索赔将自动处理。2. 承保标准 a:A. 授权
停止您的 PPI 患者信息...
• 如果夜间症状加重,请尝试使用床腿下的垫块将床头抬高 10 至 20 厘米(4 至 8 英寸)。 • 停止或减少饮酒。每周饮酒量不得超过 14 单位。如果您确实喝了这么多酒,最好将其平均分配到 3 天或更长的时间。如果您觉得自己有酗酒问题,请咨询医疗保健专业人员。 • 戒烟。与医疗保健专业人员讨论戒烟方法或拨打免费电话 0800 085 2219,咨询“帮助我戒烟”。
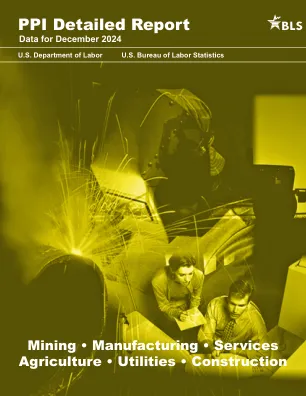
2024 年 12 月 PPI 详细报告
经季节性调整后,12 月最终需求生产者价格指数上涨 0.2%。11 月最终需求价格上涨 0.4%,10 月上涨 0.2%。(见表 A。)未经调整后,最终需求指数在 2024 年增长 3.3%,而 2023 年则上涨 1.1%。12 月最终需求价格上涨可以归因于最终需求商品指数上涨 0.6%。最终需求服务价格保持不变。12 月最终需求减去食品、能源和贸易服务的指数小幅上涨 0.1%,与 11 月相同。最终需求减去食品、能源和贸易服务的价格在 2024 年上涨 3.3%,而 2023 年则上涨 2.7%。最终需求最终需求商品:12 月最终需求商品指数上涨 0.6%,为连续第三次上涨。 12 月份最终需求商品价格上涨归因于最终需求能源指数上涨 3.5%。相比之下,最终需求食品价格小幅下跌 0.1%,而最终需求商品减去食品和能源的指数保持不变。产品详情:12 月份最终需求商品价格上涨的领涨者是汽油指数,上涨 9.7%。居民用电、肉类、机动车、燃气燃料以及新鲜水果和瓜类的价格也上涨。相反,新鲜和干蔬菜指数下跌 14.7%。碳钢废料和残余燃料的价格也下跌。(见表 2。)最终需求服务:12 月份,最终需求服务指数保持不变,11 月份上涨 0.3%。12 月份,最终需求运输和仓储服务价格上涨 2.2%,抵消了最终需求服务减去贸易、运输和仓储和最终需求贸易服务指数的下跌,后者分别下跌 0.2% 和 0.1%。 (贸易指数衡量批发商和零售商的利润变化。)产品详情:12 月份最终需求服务指数中,客运(部分)价格上涨 7.2%。存款服务(部分)、汽车燃料和润滑油零售、食品零售以及化学品和相关产品批发的指数也上涨。


HüppiPetra Susan日期和HüppiPetra Susan日期和
_____ Personal Information _________________________________________________ Family name, First name: Hüppi Petra Susan Date and Place of Birth: 26 October 1960;瑞士卢塞恩;瑞士ORCID ID:0000-0002-7383-6648 https://orcid.org/000000-0002-7383-6648 Google Scholar ID:https://scholar.google.com/citations? https://www.unige.ch/medecine/petri/fr/groupes-de- recherche/184huppi/membres-du-groupe/petra-huppi/ HUG URL: https://www.hug-ge.ch/developpement-croissance/centre-du-developpement-enfant UZH URL: https://www.uzh.ch/de/explore/management/unirat.html usz url:https://wwwwwww.usz.ch/team/petra-hueppi/ childlab url: ________________________________________________________________ 2003 Full Professor , University of Geneva, Switzerland 1998 Privat-docent, University of Geneva, Faculty of Medicine 1993 Boards of Peadiatrics/Neonatology (Switzerland) 1987 US Medical graduation for Foreign Medical Graduates 1986 M.D., Medicine, University of Berne, Switzerland _____ Current positions ____________________________________________________________________________________________________________________________________________________________]瑞士日内瓦大学医院儿童和青少年,2003年 - 日内瓦大学儿科教授,1998年 - 访问科学家美国波士顿哈佛医学院儿童医院神经病学。 _____ Employment history __________________________________________________________________ 2019 -2023 Vice Dean of the Faculty of Medicine, University of Geneva, Switzerland 1998 -2003 Director, Child Development Unit, Dept.美国波士顿哈佛医学院儿童医院神经病学。_____ Employment history __________________________________________________________________ 2019 -2023 Vice Dean of the Faculty of Medicine, University of Geneva, Switzerland 1998 -2003 Director, Child Development Unit, Dept.儿童医院儿童医院,日内瓦大学1996- 1997年,新生儿学/部门联合计划儿童健康研究中心的Janeway学者Charles。美国波士顿儿童医院哈佛医学院神经病学。美国波士顿儿童医院哈佛医学院神经病学。1994-1996新生儿学(雷诺兹富裕的史密斯奖学金),新生儿学联合计划,美国波士顿,美国波士顿,1994年,1994年,1994年至1994年,儿童医院,1990年,1990年贝尔恩(Berne)1990年新生儿/行为研究研究员,儿童医院,儿童医院,纽约市,NENON,boston和2个月,美国,1988年9月1日。 Department of Neonatology, University Hospital for Obstetrics and Gynecology, Bern, Switzerland 1987-1988 Resident, Department for Anaesthesiology, University Hospital, Bern, Switzerland _____ Selected Institutional Responsibilities ___________________________________________________ 2018- Member of the Scientific Advisory Board to NeuroSpin CEA Saclay, Paris 2015- Member of the Scientific Advisory Board of the Developing Human Connectome dHCP, London (PI D. Edwards) 2016-2022 ESPR Vice-President – European Society for Pediatric Research 2012-2020 National Research Council Member Swiss National Science Foundation (SNSF) 2012-2014 Agence National de Recherche (ANR) France Official member of Research Council _____ National and International Academic Institutional responsibilities ______________________________ National 2019- Elected member of the Board of Trustees of the University of Zurich (UZH) ( https://www.uzh.ch/de/explore/management/unirat.html ) 2019- Board of trustees of the University Hospital of Zurich – Representative UZH ( https://www.usz.ch/team/petra-hueppi/) International 2024- Vice-President Elect, International Society for Magnetic Resonance in Medicine (ISMRM)https://www.ismrm.org/members-only/committee-directory/#execneture

对接受 NSAID 或抗血小板治疗的患者的胃保护(使用 PPI) 关于何时开始使用 PPI 与 NSAID(或抗血小板)治疗胃
艰难梭菌感染 (CDI) 观察性研究发现,PPI 使用者感染 CDI 的风险比非使用者大约高 2-3 倍。CDI 治疗期间使用 PPI 与复发风险增加 42% 相关。英国公共卫生部指南建议,对于患有或有 CDI 高风险(使用抗生素、住院、高龄和潜在发病率以及炎症性肠病)的患者,应考虑停用 PPI 或重新审查其对 PPI 的需要。骨质疏松性骨折观察性研究表明,高剂量和长期(> 1 年)使用 PPI 可能会略微增加髋部、腕部或脊柱骨折的风险。有吸烟史的绝经后女性使用 PPI 的时间越长,风险就越大,因为吸烟会抑制钙的吸收。吸烟和使用 PPI 可能会对由钙吸收受损介导的骨折风险产生协同作用。英国药品和保健产品管理局(MHRA)在 2012 年 4 月发布的建议中指出:“最近的流行病学证据表明,长期使用 PPI 会增加骨折风险。有骨质疏松症风险的患者应根据现行临床指南进行治疗,以确保他们摄入足够的维生素 D 和钙”。与 PPI 相关的其他不良反应 PPI 的不良反应通常较轻且可逆;然而,通过病例报告和观察性研究(受偏见和因果关系难以证明的影响),长期 PPI 治疗可能会与不常见的严重不良反应有关,例如: • 低镁血症:MHRA 在 2012 年警告长期使用 PPI 后有发生低镁血症的风险,

PPI:患者的脑信号预读 -
自动癫痫发作检测对于癫痫诊断和治疗非常重要。用于癫痫检测的一种新兴方法,即立体电脑摄影(SEEG),可以提供详细的立体脑电波信息。但是,在临床场景中对SEEG进行建模将面临挑战,例如不同患者之间的巨大领域变化和不同大脑区域之间的急剧模式演变。在这项研究中,我们提出了一个基于P的基于P的模型,以解决这些挑战,以应对这些挑战。首先,我们设计了两个新型的自我监督任务,可以从丰富的Seeg数据中提取丰富的信息,同时保留从不同大脑区域记录的大脑信号之间的独特特征。然后提出了两种技术,通道背景减法和大脑区域增强,以有效解决域移位问题。广泛的实验表明,PPI在两个公共数据集和我们收集的一个现实世界中的临床数据集上的表现优于SOTA基准,这证明了PPI的有效性和实用性。最后,可视化分析说明了两种域概括技术的合理性。