XiaoMi-AI文件搜索系统
World File Search Systemray
IAEA-TECDOC- 1363 使用伽马射线光谱数据进行放射性元素测绘的指南
现代计算机数据处理的使用使得引入新的解释方法成为可能,并且在解决地质和环境问题时实现了更高的可靠性。本报告的目的和范围是介绍伽马射线光谱法在辐射环境中应用的理论背景,并根据现有知识强调和说明该领域的新程序。本报告介绍了放射性的原理、当代辐射单位以及伽马射线光谱法的基本原理及其在机载、地面、车载、钻孔和实验室测量中的应用。伽马射线光谱法在环境研究和地质测绘中的应用示例说明了使用此方法进行数据采集、处理和报告的条件、要求和程序。
IAEA-TECDOC- 1363 使用伽马射线光谱数据进行放射性元素测绘的指南
现代计算机数据处理的使用使得引入新的解释方法成为可能,并且在解决地质和环境问题时实现了更高的可靠性。本报告的目的和范围是介绍伽马射线光谱法在辐射环境中应用的理论背景,并根据现有知识强调和说明该领域的新程序。本报告介绍了放射性的原理、当代辐射单位、伽马射线光谱法的基本原理及其在机载、地面、车载、钻孔和实验室测量中的应用。伽马射线光谱法在环境研究和地质测绘中的应用示例说明了使用此方法进行数据采集、处理和报告的条件、要求和程序。
IAEA-TECDOC- 1363 使用伽马射线光谱数据进行放射性元素测绘的指南
现代计算机数据处理的使用使得引入新的解释方法成为可能,并且在解决地质和环境问题时实现了更高的可靠性。本报告的目的和范围是介绍伽马射线光谱法在辐射环境中应用的理论背景,并根据现有知识强调和说明该领域的新程序。本报告介绍了放射性的原理、当代辐射单位、伽马射线光谱法的基本原理及其在机载、地面、车载、钻孔和实验室测量中的应用。伽马射线光谱法在环境研究和地质测绘中的应用示例说明了使用此方法进行数据采集、处理和报告的条件、要求和程序。

材料加速平台(地图):加速材料研发以应对紧急社会挑战在软X射线照射下Fapbbr3钙钛矿的降解和自我处理
广泛使用钙钛矿,因为光吸收器要求更深入地了解这些材料与光的相互作用。在这里,通过光膜光学光谱和微光亮度,在高毛利率同步源的软X射线光束下跟踪甲酰胺铅三溴(FAPBBR 3)的化学和光电特性的演变。在辐照过程中,两个对比过程正在发挥作用。材料的降解表现出PB 0金属簇的形成,气态BR 2的损失,减少和移位光致发光发射。由于PB 0的重新氧化以及FA +和Br-ions的迁移,因此延长光束暴露时间的光致发光信号归因于FAPBBR 3的自我修复。这种情况在通过AR +离子溅射处理的FAPBBR 3栏上进行了验证。降解/自我修复效应先前报道了辐照到紫外线状态,具有基于perovskites的X射线检测器的寿命。
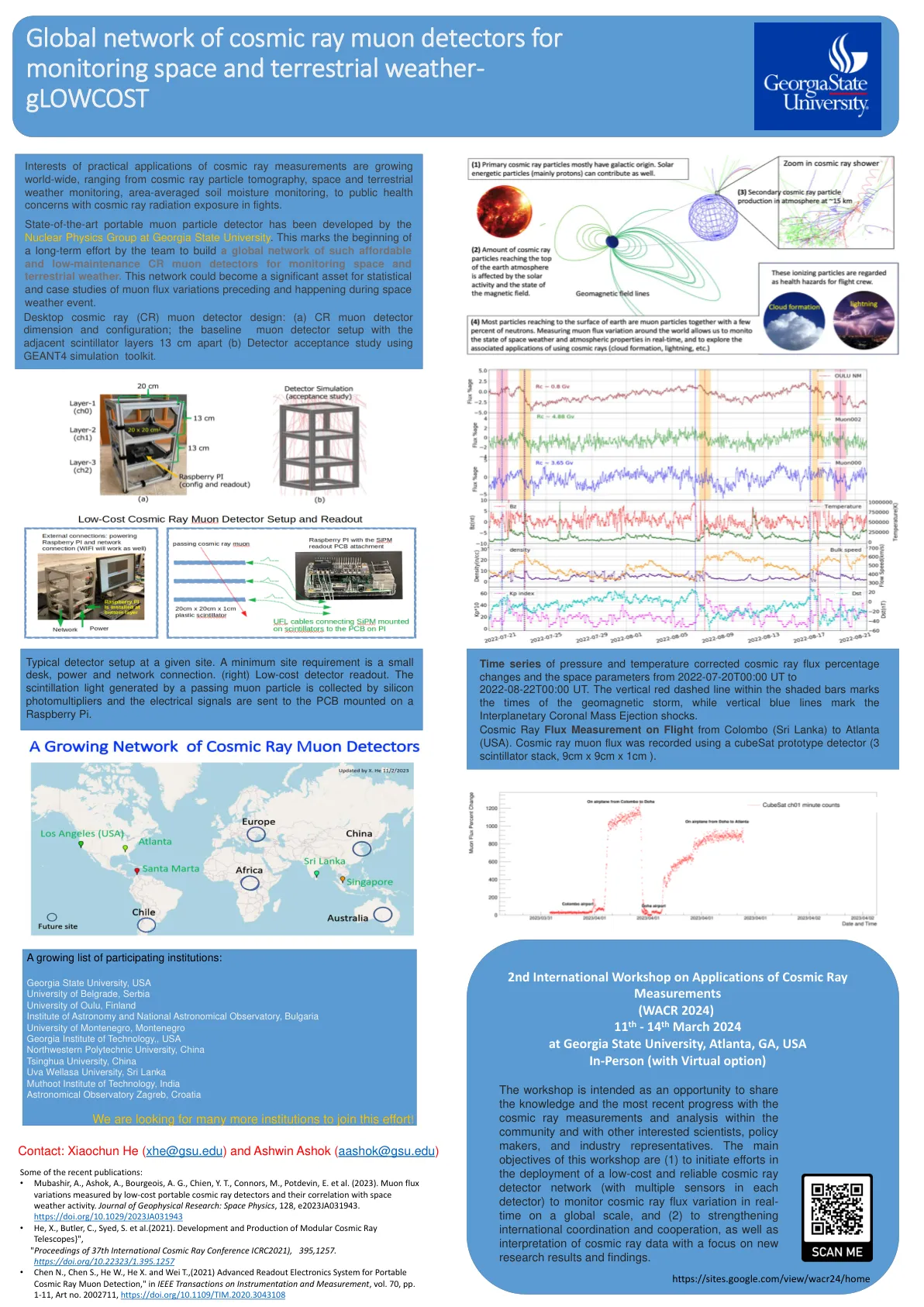
用于监视空间和地面天气的宇宙射线MUON检测器的全球网络 -
该研讨会旨在与社区内的宇宙射线测量和分析以及其他感兴趣的科学家,政策制定者和行业代表分享知识和最新进展的机会。该研讨会的主要目标是(1)在部署低成本且可靠的宇宙射线探测器网络(每个探测器中都有多个传感器)来发起努力,以监视全球范围内实时时间的宇宙射线通量变化,以及(2)以加强与宇宙射线射线数据的诠释,并在新的研究中进行了新的研究,并在新的研究中进行了新的研究和新的研究。
Ray Medicine Shaw and Research竞赛(Naipper)
5。职位的任期:上述职位纯粹是临时的,最初是一年的时间(每年可根据候选人的最高绩效进行三年的绩效),并且与项目持续时间是共同的终端。6。符合资格标准的候选人可能会在27.01.2025(星期一)从02:00 PM开始在房间号209,B街,B街,Niper-Sas Nagar药物系 - 160062(旁遮普邦)。7。候选人出现在步入式面前浏览器需要在规定的配置中列出适当填写的申请表,并在其上贴上最新的护照尺寸照片以及证明 /学位 /证书的证明副本等。< / div>> < / div>支持申请表中的资格,经验和其他列中的平均值。出现在步入式访问的候选人必须确保他们满足资格标准。
1. 宇宙线传输简介 2. 电场和磁场中的粒子运动
• 粒子漂移的方向从一个太阳黑子周期变化到下一个周期。 • 对于 A>0,当 GCR 进入日光层时,漂移将它们带向两极并沿着电流片向外移动。 • 对于 A<0,模式相反(“A 负”)

使用晶圆射线示踪剂
摘要:功率转换效率(PCE)是评估太阳能电池的输出特性的主要参数。抗反射涂层(ARC)起着抑制太阳能电池表面的光损失的作用,从而增强了PCE。本文研究了晶体硅(C-SI)太阳能电池上双层抗反射涂层(DLARC)的不同材料。使用PV Lighthouse软件的晶圆射线示踪剂完成模拟硅太阳能电池的总体过程方法。检查了具有不同类型的双层的五个光捕获(LT)方案。c-Si的最大电势光电密度(J MAX)用ARC显示出比参考c-Si(无弧)的J max的改善。lt方案II:SIO 2 /TIO 2产生J Max的最大值,其中该值为42.20 mA /cm 2。这表明方案II具有最高的J MAX增强功能,值为10.01%。这一发现意味着DLARC适用于减少光损失,因此有效地提高了太阳能电池的性能。关键字:光伏,太阳能电池,抗反射涂层,光捕获,射线跟踪1。简介
单像素X射线成像
X射线检测器可以在非结构测试,辐射暴露监测,安全检查,包装分类,医学诊断和计算机断层扫描(CT)中找到各种应用。在工作原理方面,可以间接或直接检测到X射线辐射。间接地,闪烁体用于将高能量X射线光子转换为可见的荧光,然后通过Pho-Todiode将其转换为电信号。由于能量构造和闪烁体散射的局限性,因此产生高分辨率图像的过程具有挑战性。在X射线检测的直接方法中,半导体材料通常用于将高能X射线直接转换为电信号,从而提供更高的能量转换效率和更好的成像分辨率。最近,已经出现了直接的X射线检测,因此已经出现了高原子数(高Z)材料,例如金属卤化物钙钛矿(MHP),无铅钙钛矿和无机/有机材料。尽管这些材料可以有效地吸收高能量X射线光子,但这些具有低浓度缺陷的高质量单晶材料仍然具有挑战性。因此,由于激发载体的强烈重新支持,基于这些材料的X射线检测器具有相对较低的灵敏度。我们正在研究新材料和结构来解决这个问题。ti 3 C 2 t x mxenes由于其出色的电导率,机械性柔韧性和可调带镜头而特别有吸引力,此外还具有super层水性分散性。One promising option is MXenes, a type of 2D materials that consists of transition metal car- bides or nitrides with the general formula M n + 1 X n T x (where n ranges from 1 to 4, M is an early transition metal like Ti, Sc, or Cr, X can be carbon or nitrogen, and T x represents surface terminal groups such as F, O, OH, and Cl).1与单晶钙钛矿材料相比,Ti 3 C 2 t x mxenes纳米膜更容易通过真空过滤和转移而无需引入杂质而实用。与其他具有高电阻的材料不同,Ti 3 C 2 t X Mxenes的高电导率可以降低设备的总体电阻,从而使设备能够在相对较低的电压下实现X射线检测。与基于硅的底物的出色兼容性

采用空间分辨的X射线反射的表面曲线:液体铜上的石墨烯结构域
X射线反射率(XRR)被广泛用于研究硬和软凝结物质材料的表面和界面,包括2D材料,纳米材料和生物系统。它允许沿其正常的横向平均电子密度曲线沿其正态分子延伸,并具有子角度的精度。[4-6]这有助于确定各种参数,包括表面粗糙度,单层或多层材料的结构以及毛细血管对液体表面的影响。高毛利率同步X射线束可以在环境条件下实时解决分子水平的材料结构,而其他表面敏感的实验技术几乎无法访问。[7]此类实验的示例是使用专用设备和样品单元的液体表面和界面进行研究。[8–11]但是,与液体的XRR相关的特定问题。液体和支撑之间的润湿角会引起样品液体的曲率,这通常使数据分析复杂化。[12]可以通过利用能够使用大面积样品(例如Langmuir槽,[13])使用特殊数据处理方法的样本环境来解决此问题。[15]但是,在某些情况下,可以有利地利用样品曲率,例如Festersen等。[15]使用宽平行的合成光束将XRR曲线记录在“一击”中,但在散射矢量q的范围内有限。[17]这些系统正在促进高质量材料的生长[18],但同时在实验上可能非常苛刻。最新的样本环境的发展[16]发表于原位和/或操作XRR研究开放了新的机会,例如,通过化学蒸气沉积(CVD)对2D材料在液态金属催化剂(LMCAT)上的生长过程中对2D材料进行了研究。[19]必须适应高运行温度,高材料蒸发以及在大气压下暴露于反应性气体的混合物中。此外,它们仅限于有限尺寸的样本