XiaoMi-AI文件搜索系统
World File Search Systemreceiver
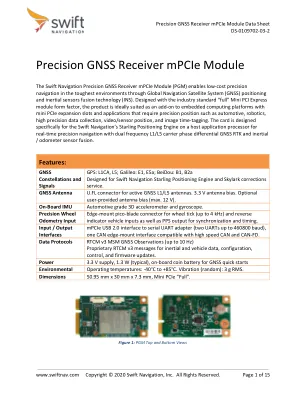
精密 GNSS 接收器 mPCIe 模块
Swift Navigation 精密 GNSS 接收器 mPCIe 模块 (PGM) 通过全球导航卫星系统 (GNSS) 定位和惯性传感器融合技术 (INS),在最恶劣的环境中实现低成本精密导航。该产品采用行业标准的“全”Mini PCI Express 模块外形设计,非常适合作为带有 mini PCIe 扩展槽的嵌入式计算平台的附加组件,以及需要精密定位的应用,例如汽车、机器人、高精度数据收集、视频/传感器位置和图像时间标记。该卡专为主机应用处理器上的 Swift Navigation Starling 定位引擎而设计,用于实时精密导航,具有双频 L1/L5 载波相位差分 GNSS RTK 和惯性/里程表传感器融合。

CIPRM 平衡接收器,修订版 2022-01
如需查看我们全球办事处的完整列表,请访问 www.excelitas.com/locations © 2021 Excelitas Technologies Corp. 保留所有权利。Excelitas 徽标和设计是 Excelitas Technologies Corp 的注册商标。本文中描述的所有其他不属于 Excelitas Technologies 或其子公司的商标均为其各自所有者的财产。Excelitas 保留随时更改本文件的权利,恕不另行通知,并且不对编辑、图片或印刷错误承担责任。
调频发射器和接收器的设计和构造...
认证................................................................................................................................................ii

使用有内存的接收器的遗忘转移-McGill
[13]。Rabin原型OT的安全性是基于分解问题的。这些是相对强大的计算假设。然而,众所周知,遗忘转移可能不能基于较弱的假设:证明忽略的转移是安全的,假设仅在黑盒减少中的单向函数与证明p = np [24]一样困难。遗忘的转移与关键协议一起在一系列任务中落下,这些任务只知道如何使用至少使用陷阱门单向功能实施。但是,如果爱丽丝和鲍勃可以访问量子通道,则可以将遗忘的转移降低为较弱的原始词,称为位承诺[4,12],因此仅在量子计算机模型中仅保存一个单向函数。遗忘的转移也可以基于嘈杂的通道[15,14]。在本文中,我们描述了如何使用接收器鲍勃的内存大小来实现遗忘的传输。我们假设有大量随机数据的初始广播,在此期间,BOB可以免费使用无限制的概率函数。只要函数的输出大小有限并且不超过BOB的内存大小(存储空间),我们就可以证明OT协议是安全的。在爱丽丝上没有任何计算或内存限制。为了执行协议,双方都需要使用一定数量的内存。Let;成为0 <<<<的常数Let;成为0 <<<<

PAE T6T 发射器和 T6R 接收器,VHF ...
精心实施 DSP 技术可显著减少无线电内的元件数量。这可提高可靠性并降低物流成本。所有调制和解调过程均使用 DSP 算法进行,这些算法可提供一致的长期性能,从而进一步提高设备可靠性。无线电内的所有可调参数均可使用前面板控件进行修改,或通过连接到耳机/诊断端口的计算机进行修改,从而无需在无线电使用寿命期间拆除设备盖。
TFP201,TFP201A TI PanelBus 数字接收器
电源电压范围,DVDD、AVDD、OVDD、PVDD-0.3V 至 4V..........................................................................................................................................................................................................................................................输入电压范围,逻辑/模拟信号-0.3V 至 4V..........................................................................................................................................................................................................................................................................工作环境温度范围 0°C 至 70°C.................................................................................... ................. ... . . . . . . . . . . . . . . . . . . . . . 距外壳 1.6 毫米 (1/16 英寸) 处的引脚温度,持续 10 秒 260 ° C . . . . . . . . . . . . . . . . . 封装功率耗散/PowerPAD :焊接(见注释 1) 4.3 W . . . . . . . . . . . . . . . . . . . . 未焊接(见注释 2) 2.7 W . . . . . . . . . . . . . . . . ESD 保护,所有引脚 2.5 KV 人体模型 . . . . . . . . . . . . . . . . . . . . . JEDEC 闩锁 (EIA/JESD78) 100 mA。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。

TOPSTAR 3000 – 增强型太空 GPS 接收器...
空间无线电导航 空间 GPS 接收机服务 在空间任务中使用 GPS 接收机正成为一种相当普遍的技术,主要应用包括: – 实时轨道测定服务:接收机为机载和地面站提供三维位置和速度信息,从而提高航天器的自主性并简化地面跟踪和测距部分。例如,可在机上使用实时定位来计算本地轨道框架坐标,从而提高姿态指向精度而非上行滤波位置。机载位置测定结果也可下载到地面站,以监测航天器轨道。这一特性在星座的情况下尤其有用,因为避免定位系统饱和需要高成本地复制地面跟踪站。
ALR-69A 雷达预警接收器 (RWR) - GlobalSecurity.org
2006 年 6 月,应支持购买大约 540 台 ALR-69A 中的 50 台。• 承包商对核心 ALR-69A 系统进行的系统级测试是 2005 财年进行的唯一重要测试。目前,该系统正在进行承包商测试。测试在佐治亚州罗宾斯空军基地的电子战航空电子综合支持设施进行。• DOT&E 于 2005 年 5 月批准了一项作战评估 (OA) 测试计划。该 OA 包括全面的政府实验室、地面和消声室安装设施测试。它被推迟了大约四个月,直到 2006 财年第一季度,主要是由于软件成熟度不足。

通过...
摘要 - 我们考虑在太空中检测GNSS接收器的SPOOFIF攻击的问题,绕地球绕着地球绕。由于空间中的接收器无法利用所谓的机会信号的存在,因此必须依靠检测信号本身中的异常并检查其测量值与计算的轨道位置的一致性。我们考虑三个不同的一致性检查:在前端的总收到的GNSS信号功率上;从每个卫星发出的信号的估计载体与噪声比(C/N 0)上;在最终计算的位置在接收器输出处。此外,我们设计了一种融合方法,该方法结合了三个检查中的软输出,以提供更可靠,更强大的检测。在现实的模拟环境中测试了所提出的技术,表明尽管位置一致性检查是迄今为止最可靠的,但来自所有这三个的软信息的正确融合允许在不同条件下进一步提高检测率。

用于空间天气的低成本 GNSS 接收系统
% =================================================== % TEC 数据处理软件 % 顾问:Prof.Dr. Pornchai Supnithi % CSSRG 实验室,% 电信工程学院 % 工程学院 % 拉卡邦先皇理工学院 % 泰国曼谷 % ======================================================= % 输出数据:每天 % TEC.vertical = 垂直总电子含量 (VTEC) % TEC.slant = 倾斜总电子含量 (STEC) % TEC.withrcvbias = 带接收器 DCB 的 STEC % TEC.withbias = 带卫星和接收器 DCB 的 STEC % TEC.STECp = 根据代码范围计算的 STEC % TEC.STECl = 根据载波相位计算的 STEC % DCB.sat = 卫星 DCB % DCB.rcv = 接收器 DCB % prm.elevation = 仰角 % ROTI = 速率更改 TEC 指数