XiaoMi-AI文件搜索系统
World File Search Systemrecord
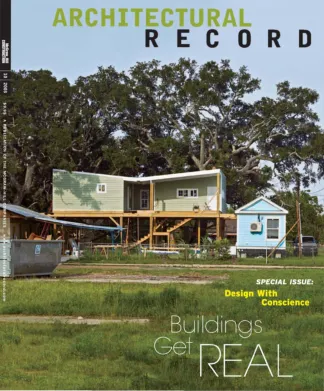
建筑记录 - 美国现代主义
尊敬的。若要避免接收此类邮件,请发送邮件至 ARC H 11"flc 1.ui;.;.1 Re CO RO,邮件列表管理员,PO Box 555,Hightstown,NJ C85W。LLC GROW·HILL COMPANIES,INC 的官员:Harol J. McGraw III 董事长、总裁兼首席执行官;Kenneth M. Vittor。GC11cral 公司总裁;RoJert J. Bahash,副总裁兼首席财务官;Flinbeth O'Mdi 3,财政运营高级副总裁。版权和重印:版权所有,已在美国专利局注册。版权所有,2008 年,McGralv Hill 公司。保留所有权利。如有必要,经版权局授权,可在版权清理中心(CCC)1.21 F.ose\\!'OOd Drive, ..J:mver ~, Mass. 01923 注册。将此处的任何内容复印用于个人目的hdi~vrc l 在 ht" rf"li:thlt'。如何.vr-r。 ht'C .. 1111't' nf
国会记录 - GovInfo
司法提名 舒默先生。总统先生,如果没有一个值得信赖、平衡和公正的司法机构,我们的民主就不可能长期维持下去。正如我们在最近几个月以严峻和可怕的方式看到的那样,主持法官席的男男女女对我们国家的命运和人民的自由拥有巨大的权力。在提名法官时,我们必须做好。因此,今天,参议院将继续履行其职责,推动拜登总统提名的高素质、高度多元化和高度成就的司法候选人。今天下午,我们将首先投票确认约翰·李法官担任第七巡回法院巡回法官。如果得到确认,李法官将成为历史上第一位主持第七巡回法院的亚裔美国人,加入拜登提名的其他法官行列,让我们的法院更能反映我们的国家。我希望李法官能得到两党的支持,他的记录当然值得。大约十年前,当他被任命为地区法官时,他已经得到了本议院的确认。在任职期间,李法官撰写了 800 多份意见,而只有 11 次被推翻。


疫苗拒绝记录
您的建议至关重要。儿童医疗保健提供者的疫苗建议会极大地影响父母的最终疫苗接种决定。1 密歇根大学的研究人员表示,大多数父母信任孩子的医生提供的疫苗安全信息(76% 表示“非常信任”)。2 同样,2009 年 HealthStyles 调查的分析也发现,绝大多数父母(81.7%)认为孩子的医生或护士是帮助他们做出是否为孩子接种疫苗决定的最重要信息来源。3 Gust 及其同事发现,儿童医疗保健提供者的建议是改变那些不愿为孩子接种疫苗或推迟为孩子接种疫苗的父母想法的主要因素。 4 美国家庭医生学会 5 和 CDC 提供了关于如何与父母讨论孩子接种疫苗需求的指导(请参阅 www.cdc.gov/vaccines/hcp/conversations/conv-materials.html#understand)。

国会记录 - GovInfo
使他与自己的文化和环境建立了深厚的联系。除了是一位经验丰富的领导者之外,上个月我们失去他时,他还是一个相对年轻的人。我喜欢看到杰罗米对他的部落所取得的进步感到自豪和热情。有一次,他带我参观了部落的新医疗设施,对他来说,部落成员能够在优质的环境中得到护理,他们拥有所有美国人应得的尊重和尊严,这一点很重要。他不仅为设施是一流的而感到自豪,而且为人们将获得的护理也是一流的而感到自豪。杰罗米还是部落条约权利的热情倡导者。Jeromy 认为,作为部落主席,他不仅要为今天的渔民或象拔蚌捕捞者发声,还要为 Port Gamble 的 S’Klallam 部落成员的后代争取权利。我无法告诉你,在过去 10 年里,我与海军进行了多少次讨论,在这些讨论中,Jeromy 坚信他有责任确保他的人民能够享受条约中承诺的权利。去年,我参观了 Port Gamble S’Klallam 部落正在进行的一个新住宅开发项目,Jeromy 笑容满面地解释说,这不仅仅是对庇护所的投资;这是对家庭的投资。他说:想想这对我们的部落成员意味着什么。杰罗米经常告诉我,他为他的部落领袖和我们国家的领袖祈祷,他祈求力量和智慧,杰罗米每天都展现这些。对于最爱他的人来说,杰罗米是一个充满爱心的家庭男人,他的妻子托尼、他们的孩子萨曼莎和雅各布以及他的兄弟查德和科里都健在。在音乐剧《汉密尔顿》中,他们提出了一个问题:什么是遗产?