XiaoMi-AI文件搜索系统
World File Search Systemrmse
机器学习驱动的血液现实实验......
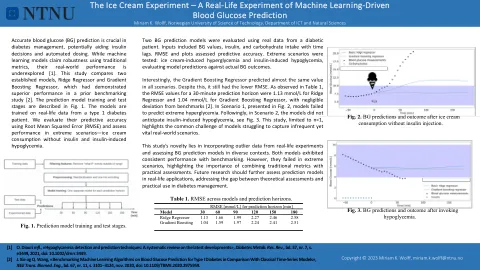
准确的血糖 (BG) 预测对糖尿病管理至关重要,可能有助于胰岛素决策和自动给药。虽然机器学习模型声称使用传统指标具有稳健性,但它们的实际性能尚未得到充分探索 [1]。本研究比较了两个成熟的模型,即 Ridge 回归和 Gradient Boosting 回归,这两个模型在之前的基准研究中表现出色 [2]。预测模型训练和测试阶段如图 1 所示。这些模型是根据 1 型糖尿病患者的真实数据进行训练的。我们使用均方根误差 (RMSE) 评估它们的预测准确性,并评估它们在极端情况下的性能——未注射胰岛素的冰淇淋消费和胰岛素引起的低血糖。

衰老优化的收费控制多...
摘要:本文提出了一种方法,该方法可导致高度准确的电荷依赖性多阶段恒定电流(MCC)充电算法用于电动自行车电池,以减少充电时间,而不会通过避免使用Li-Plpling来加速老化。首先,通过三电极测量值对当前速率,最新电荷和Li-Plating之间的关系进行了实验分析。因此,提出了一种依赖社会的充电算法。其次,在MATLAB/SIMULINK中开发了基于扩展的Kalman滤波器的SOC估计算法,以进行高精度SOC估计并精确控制充电算法。实验的结果表明,SOC估计的均方根误差(RMSE)为1.08%,并且从0%到80%SOC的充电时间降低了30%。

激光雷达高程数据精度评估...
1 澳大利亚莫纳什大学地理与环境科学学院 GIS 中心,Clayton VIC 3800,澳大利亚 2 澳大利亚可持续集水区中心和南昆士兰大学工程与测量学院 Toowoomba QLD 4350,澳大利亚 电子邮件:xiaoye.liu@usq.edu.au 摘要 机载 LiDAR 已成为广泛应用中数字高程数据采集的首选技术。相对于指定垂直基准的垂直精度是指定 LiDAR 高程数据质量的主要标准。LiDAR 高程数据的定量评估通常通过将高精度检查点与从 LiDAR 地面数据估计的高程进行比较来进行。然而,通过现场测量收集足够数量的检查点是一项耗时的任务。本研究使用测量标记评估农村地区不同土地覆盖的 LiDAR 数据的垂直精度,并探索从与检查点位置相对应的 LiDAR 数据中获取高程的不同方法的性能。使用频率直方图和分位数-分位数图对 LiDAR 数据和检查点之间的垂直差异进行了正态性检验,因此可以使用适当的测量方法(公式 1.96 × RMSE 或 95 百分位数)来评估不同土地覆盖的 LiDAR 数据的垂直精度。结果证明了使用测量标记作为检查点来评估 LiDAR 数据垂直精度的适用性。关键词:LiDAR、机载激光扫描、数字高程模型、测量标记、精度评估 引言 机载光探测和测距 (LiDAR),也称为机载激光扫描 (ALS),是最有效的地形数据收集手段之一。使用 LiDAR 数据生成数字高程模型 (DEM) 正在成为空间科学界的标准做法 [10]。LiDAR 输出的一个吸引人的特点是点的三维坐标的高密度和高精度,其特点是垂直精度为 10-50 厘米 RMSE(均方根误差)在 68% 置信水平下(或 19.6-98 厘米在 95% 置信水平下),水平点间距为 1-3 米 [13]。只有在最理想的情况下才能实现 10-15 厘米 RMSE(置信度为 68%)的更高垂直精度 [ 10 ]。LiDAR 数据质量评估方法也因应用和 LiDAR 数据的交付格式而异。项目中 LiDAR 高程数据的实际精度取决于飞行高度、激光束发散度、扫描带内反射点的位置、LiDAR 系统误差(包括全球定位系统 (GPS) 和惯性测量单元 (IMU) 的误差)、与 GPS 地面基站的距离以及 LiDAR 数据分类(过滤)可靠性 [10]、[27]。对于使用分类的 LiDAR 点云生成的 DEM,相对于指定垂直基准的垂直精度是指定 LiDAR 高程数据质量的主要标准 [19]。LiDAR 高程数据的定量评估通常通过将高精度检查点与从 LiDAR 估计的高程进行比较来进行

使用 NDVI 阈值法预测植被覆盖比例对地表发射率和温度的影响
预测地表能量收支需要精确的地表发射率 (LSE) 和地表温度 (LST) 信息。LST 是基本气候变量之一,也是局部和全球尺度地表过程物理中的重要参数,而 LSE 是物质成分的指标。尽管有大量关于使用遥感数据计算 LST 和 LSE 的方法和算法的出版物,但准确预测这些变量仍然是一项具有挑战性的任务。在现有的计算 LSE 和 LST 的方法中,特别关注的是归一化差异植被指数阈值法 (NDVI THM),尤其是对于农业和森林生态系统。要应用 NDVI THM,了解植被覆盖比例 (P V) 至关重要。本研究的目的是调查使用 NDVI THM 时 P V 预测精度对 LSE 和 LST 估计的影响。2015 年 8 月,在德国东南部巴伐利亚森林国家公园的混合温带森林中开展了一项实地活动,与 Landsat-8 立交桥同时进行。在 37 个地块的实地测量了 P V。使用了四种不同的植被指数以及人工神经网络方法来估计 P V 并计算 LSE 和 LST。结果表明,与传统植被指数(R 2 CV = 0.42,RMSE CV = 0.06)相比,使用人工神经网络(R 2 CV = 0.64,RMSE CV = 0.05)可以提高 P V 的预测精度。本研究结果还表明,估计的 P V 的精度变化影响了 LSE 的计算结果。此外,我们的研究结果表明,虽然 LST 取决于 LSE,但在预测 LST 时还应考虑其他参数,因为更准确的 LSE 结果并没有提高 LST 的预测精度。

GPS-IMU传感器融合用于可靠的自动驾驶位置估计
摘要 - 全球覆盖范围和全球覆盖范围的准确定位,使其成为具有无障碍天空视图的开放区域的可靠选择。但是,在室内空间和城市峡谷中可能发生信号降解。相比之下,惯性测量单元(IMU)由陀螺仪和加速度计组成,这些计量机提供了相对运动信息,例如加速度和旋转变化。与GPS不同,IMU不依赖外部信号,使其在受GPS有限的环境中有用。尽管如此,由于误差的积累,IMU在整合加速度以确定速度和位置的同时会流动。因此,融合GPS和IMU对于增强自动驾驶汽车中导航系统的可靠性和精度至关重要,尤其是在GPS信号受到损害的环境中。为了确保平稳导航并克服每个传感器的局限性,提出的方法将融合GPS和IMU数据。此传感器融合使用无知的卡尔曼过滤器(UKF)贝叶斯过滤技术。拟议的导航系统旨在坚固,为自动驾驶汽车的安全操作(尤其是在GPS被拒绝的环境中的安全操作)至关重要的连续和准确的定位。该项目使用Kitti GNSS和IMU数据集进行实验验证,表明GNSS-IMU融合技术可减少仅GNSS的RMSE。RMSE分别从13.214、13.284和13.363降至4.271、5.275和0.224,分别为X轴,Y轴和Z轴。使用UKF的实验结果显示了使用GPS和IMU传感器融合改善自动驾驶汽车导航的有希望的方向,并使用GPS有限环境中的两个传感器中的最佳融合。索引术语 - 自主车位,全球定位系统,惯性测量单元,传感器融合,无知的卡尔曼滤波器

使用高频线的空间域意识
空间已成为私营部门和公共部门越来越活跃的运营领域。至关重要的是,国防部(DND)具有准确的手段,以保持对部署的太空资产以及周围威胁的能见度和控制。太空域意识(SDA)是一个概念,它是指对部署的太空资产和其他对象的监视和跟踪,以确保运营安全性。当前的SDA方法包括使用地面和太空光学望远镜,以及在上部频段中运行的雷达。两个线元素集(TLE)是轨道数据最易于访问的手段,并提供轨道位置预测,其精度的精度高达1 km,速度为1 m/s。较小的航天器的日益普及,例如立方体和微型卫星作为进行太空操作的经济手段,这增加了对更准确的SDA的需求。本文测试了使用高频(HF)雷达使用视线(LOS)传播和目标检测来实现准确范围和径向速度估计的可行性。国际空间站(ISS)被选为目标,这是由于其尺寸较大和轨道较低的高度。使用20 MHz的工作频率用于刺穿电离层并照亮所选目标。范围多普勒图,并应用校正以补偿大气和滤波器误差。通过夜间传输期和日期传播期比较了电离层在不同水平的太阳能活动中的效果。使用澳大利亚开源软件的总电子含量(TEC)估计计算范围误差,该估计是澳大利亚开源软件提供的高频射线疗法实验室(PHARLAP)。发现,夜间传输不需要高估的TEC,并且不需要校正,而白天的传输测量结果受到较大TEC的极大影响。白天传输产生的估计的电离层范围延迟高达90 km,多普勒校正高达45 Hz。夜间传输的平均延迟为30公里,多普勒校正最大15 Hz。校正后的最终范围测量值在100秒的可见度中,在夜间传输期间,在100秒的可见度中,均方根误差(RMSE)为61 km。具有如此高范围残差,发现HF不适合精确的范围测量值,除非开发出更好的电离层校正方法并应用了更密集的信号处理技术。然而,夜间和白天传播的多普勒测量值均产生的剩余RMSE小于10 Hz。夜间传输范围率残差仅为85 m/s,在TLE精度的误差范围内。这表明HF可用于使用多普勒测量值进行精确测定。

利用 3D 压缩感知 SENSE 低秩 1H FID-MRSI 进行全脑高分辨率代谢物映射
图 2 顶部,3D FID-MRSI 重建代谢物体积,具有回顾性加速。完全采样采集(无加速)在 70 分钟内完成,加速因子对应于 k 空间欠采样并相应地减少采集时间(例如 3,24 分钟;6,12 分钟)。彩色图针对从 0 到第 95 个百分位数的每个代谢物范围单独缩放。底部,在所有加速因子下相对于未加速结果为每个代谢物图计算的归一化 RMSE 和 SSIM。显示了来自两个不同位置的样本光谱,它们随加速度(无、3、5)的变化很小。LCModel 拟合与拟合残差一起显示。左下方,整个大脑平均残差的 RMS 随加速度保持不变
软件包'modeva'
modeva-ackage。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。3 applyThreshold。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。4个安排图。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。7 AUC。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 8 Boyce。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 12 ConfusionLabel。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。7 AUC。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。8 Boyce。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 12 ConfusionLabel。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。8 Boyce。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。12 ConfusionLabel。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。15混乱matrix。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。17 dsquared。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。20个疾病。。。。。。。。。。。。。。。。。。。。。。。。。。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>22评估。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>24 evensess。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>26 GetBins。 div> 。 div> 。 div> 。 div> 。 div> 。 div> 。 div> 。 div> 。 div> 。 div> 。 div> 。 div> 。 div> 。 div> 。 div> 。 div> 。 div>26 GetBins。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>27 GetModeqn。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>30 didhreshold。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>31 hlfit。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。34输入。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。37 loglike。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。39棒棒糖。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>41烂摊子。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>43 Millercalib。 div> 。 div> 。 div> 。 div> 。 div> 。 div> 。 div> 。 div> 。 div> 。 div> 。 div> 。 div> 。 div> 。 div> 。 div> 。 div> 。 div> 。 div> 。 div> 。 div> 。 div> 。 div> 。 div> 。 div> 。 div> 。 div> 。 div> 。 div> 。 div> 。 div> 。 div> 。 div>43 Millercalib。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>45 mod2obed。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>49个模式的蔬菜。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>50 MultModev。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。。。。。。。。。。。51 OA。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 53 Optipair。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 54 Optithresh。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。51 OA。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。53 Optipair。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 54 Optithresh。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。53 Optipair。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。54 Optithresh。。。。。。。。。。。。。。。。。。。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>57个绘图。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>60 Plotglim。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>61偏好。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。64 predplot。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。66患病率。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 69 ptsrast2obspred。66患病率。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。69 ptsrast2obspred。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。70 Quantreclass。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。72 range01。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。73 RMSE。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 74 rotif.mods。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 76 RSQGLM。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。73 RMSE。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。74 rotif.mods。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。76 RSQGLM。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>77相似性。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>79 Standard01。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>82个阈值。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。。。。。。。。。。。。。。。。。。83 Varimp。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 87 varpart。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 9083 Varimp。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。87 varpart。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。90