XiaoMi-AI文件搜索系统
World File Search Systemrobotic

机器人手臂可以由大脑控制吗?
我们将四个微电极阵列植入了研究参与者的大脑中。微电极阵列是一种包含记录和引起神经信号的传感器的设备。神经信号是人体用来与大脑传达信息的信息。我们将两个阵列放在大脑区域,以控制手和手臂运动。这些阵列记录大脑活动以解码机器人臂的控制信号。,我们将其他两个阵列放在大脑区域,通常在触摸手时接收和解释信息。使用微小的电脉冲,这些感觉阵列会产生神经信号,这些神经信号提供有关机器人手何时与物体接触的信息。

机器人技术在职业教育中的有效性
摘要 - 在技术发展的当前时代,机器人技术被广泛用于教育机构,尤其是在职业高中。因此,这种荟萃分析的目的是实验测试在整体学习过程中使用机器人技术的有效性,以提高职业学校学生的学习能力。这项研究的方法是使用随机效应模型的荟萃分析,其中使用的研究数量为56项研究,并取自2014年至2023年的Google Scholar,ScienceDirect和ProQuest数据库。效果大小数据分析技术用于找到对每项研究的影响,并且使用JASP应用来对所有研究进行荟萃分析。该研究的结论表明,没有出版偏见,并且在95%的置信度下,将机器人技术纳入学习过程的平均效应大小为0.993(高类)。根据这项研究,将机器人技术引入课堂会显着影响学生的学习成果。的发现表明,在职业学校中,机器人技术的利用可以作为一种有效的教学工具,从而促进学生在学生中的计算思维,创造力,创新,沟通和团队合作技能的发展。根据21世纪的技术进步,对学生的熟练程度至关重要。

机器人操纵任务中的多模式VAE
摘要 - 在这项工作中,我们专注于机器人操纵领域中无监督的视力 - 语言映射。最近,已经为此任务提出了采用预训练的大语言和视觉模型的多种方法。但是,它们在计算上是要求的,需要仔细对产生的输出进行微调。更轻巧的替代方法是实现多模式变量自动编码器(VAE),可以提取数据的潜在特征并将其集成到联合代码中,这主要是在现有最终模型的图像图像或图像图纸上进行的。在这里,我们探讨了是否以及如何在模拟环境中使用多模式的VAE。基于获得的结果,我们提出了一种模型不变训练替代方案,该替代方法将模拟器中的模型性能提高了55%。此外,我们系统地评估了各个任务(例如对象或机器人位置可变性,干扰器数量或任务长度)所提出的挑战。因此,我们的工作也阐明了使用当前的多模式VAE的潜在益处和局限性,以根据视觉和语言对机器人运动轨迹进行无监督学习。索引术语 - 传感器融合,视觉学习,语义场景理解

低成本软机器人手的设计
印度[3] GSSSIETW,Mysuru/Electronics&Enerical-Tosennics和传播工程部Mysuru,印度摘要 - 该论文旨在机械地设计低成本的“软机器人手”以获得更好的有效性。软机器人手显着吸引了作为机器人技术的最终效果的焦点。与其他刚性的软机器人手相比,与人类机器人和环境机器人相互作用更安全。除此之外,以最低的成本控制非常容易控制。由于机器人的手是用柔软的材料制成的,因此它的加权也很轻,并且更合规性。本文的目的是设计低成本的软机器人手,以机械的方式获得更好的有效性,了解设计软机器人手所需的各种材料,并理解软机器人手的有效性。设计软机器人手的理由可以解释为获得更大的优势,以实现额外的“自由度”来执行各种事情,而这些事情无法通过人类手索引术语(低成本,软机器人的手,自由度,

机器人:机器人群的空中编程
摘要 - 空气编程(OTAP)是操作大型低功率无线部署(例如无线传感器或群机器人)时的重要功能。OTAP,以考虑到与网络的低功率无线性质相关的有限的通信带宽,不可靠性和较大的延迟,以及正在更新的微控制器的约束性质。本文介绍了一种针对机器人群的OTAP解决方案Robotap,可作为开源实现。Robotap设计为简约,OTAP模块和引导加载程序的闪光足迹分别低于1 kb / 4 kb。它被设计为快速:我们在不到2.3 s的时间内显示了18 kb图像的完整更新。最后,Robotap是安全的:我们在使用ARM CryptoCell-310硬件加速度,相同安全程序的软件实现或根本没有安全性的软件实现时,在NRF52840和NRF5340上进行了比较。索引术语 - otap,microcontroller,swarm,security,robotics

移动操作机器人臂-IJRPR
朝着协作机器人或配件的趋势继续增长。这些机器人旨在与人类一起工作,从而提高各种行业的效率和灵活性。配角配备了安全功能,使它们可以安全地与人类工人紧密相邻。机器人臂越来越多地与先进的传感技术(包括视觉系统,力/扭矩传感器和其他反馈机制)整合在一起。这增强了他们感知和适应环境的能力,使它们更具通用性并能够处理复杂的任务。机器人臂中人工智能(AI)和机器学习(ML)的整合是一个明显的趋势。这使机器人可以从经验中学习,优化其性能并适应不断变化的条件。AI也可以用于预测性维护,提高机器人系统的整体可靠性。具有模块化设计的机器人臂变得越来越流行。模块化允许更轻松的自定义,重新配置和可扩展性,使其适应各种应用程序和行业。在武器末端工具中有连续的发展,包括握把,传感器和其他专业附件。这些创新旨在提高机器人武器对不同任务和行业的多功能性。正在努力使包括中小型企业(中小型企业(SME)在内的更广泛的用户更广泛地使用机器人武器。这涉及创建用户友好的接口,简化的编程方法和负担得起的解决方案。机器人武器越来越多地在电子商务和物流中用于订单实现,分类和包装等任务。这些行业对自动化的需求正在推动机器人解决方案的采用。除了工业应用外,在医疗保健环境中使用机器人臂的趋势越来越大。这包括机器人协助的手术,康复和为有行动不便的人提供的援助。在3D打印应用中使用机器人臂,允许精确和受控的添加剂制造工艺。对节能机器人系统的关注正在上升。这包括使用轻质材料,节能组件以及优化能源消耗的编程策略。

用机器人第三拇指弹钢琴
图。1。钢琴弹奏任务设置。(a)SR3T的顶视图渲染,显示水平运动DOF和相关电动机。(b)SR3T的侧视图渲染,显示垂直运动DOF和相关电动机。(c)第一度自由度(DOF)的SR3T控制界面的顶视图渲染;参与者使用其右脚通过脚在脚上的惯性测量单元(IMU)捕获SR3T的运动。(d)第二DOF的SR3T控制接口的侧视图渲染。(e)在球体上投射的人拇指终点的工作表面与(f)(f)在球体上投射的SR3T端点的工作表面进行比较 - 增强人类的工作表面范围(请参阅方法)。(g,h)无约束的飞行员实验的顶部和侧视图:一位经验丰富的钢琴演奏者在佩戴和使用SR3T时自由锻炼钢琴,在使用后的1小时内有效地弹奏11个指钢琴。(i)系统实验:使用右手的5个手指加上左手食指(LHIF)和(J)使用SR3T弹奏序列。(k)参与者使用SR3T扮演在其前面显示器上显示的音符顺序。
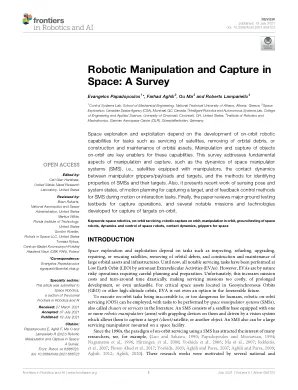
机器人操作和捕获在空间中:调查
空间探索和剥削取决于诸如卫星服务,去除轨道碎屑或轨道资产的建设和维护等任务的轨道机器人功能的发展。操纵和捕获对象在轨道上是这些功能的关键推动剂。本调查介绍了操纵和捕获的基本方面,例如空间操纵器系统(SMS)的动态,即配备了操纵器的卫星,操纵器握力/有效载荷和目标之间的接触动态,以及用于识别SMS及其目标属性及其目标的方法。此外,它还介绍了感应姿势和系统状态,捕获目标的运动计划以及在运动或交互任务期间SMS的反馈控制方法的最新工作。最后,本文审查了用于捕获操作的主要地面测试床,以及开发了几项著名的任务和技术,以捕获目标在轨道上。
用于审计的机器人流程自动化 (RPA)
本文阐述了机器人流程自动化 (RPA) 的概念及其颠覆传统审计模式的潜力。由于规则为基础的任务是重复性和手动性的,RPA 有望通过取代重复性任务和集中更高技能来改变审计师的角色,从而提高审计质量。本文的结果旨在确定哪些使用 RPA 的审计流程将以自动化为目标并优先考虑。此外,本文的目标是改善或提高审计公司的审计质量。结果可以表明,收入审计、费用审计、生产审计和投资审计等审计流程是可以在周期内使用 RPA 实现自动化的任务。另一个结果可以总结为 RPA 可以提高审计公司在收入审计和费用审计方面的价值。关键词:机器人流程自动化 (RPA)、自动化、审计、审计师

社论:太空中的机器人操控与捕获
检查、加油、升级、维修或救援卫星,清除轨道碎片,以及建造和维护大型轨道资产和基础设施等要求对于在轨空间基础设施的维护非常重要。到目前为止,所有值得注意的维修任务都是由宇航员舱外活动 (EVA) 在低地球轨道 (LEO) 上执行的。然而,这些操作风险大、成本高、速度慢,有时甚至不可行。EVA 可以被机器人在轨维修 (OOS) 取代,在此期间,任务由空间机械手系统 (SMS) 执行,在文献中也称为追逐者或服务者。它们由一个卫星基座组成,该基座配备一个或多个带有抓钩装置的机器人机械手(臂),并由视觉系统驱动,从而能够捕获目标(客户)卫星。SMS 也可以是安装在空间设施上的大型维修机械手。本研究课题重点关注在轨操纵和捕获,以及与这些活动相关的方面。因此,它包括与刚性和柔性 SMS 的动力学、相关的接触动力学、空间系统的识别方法、监控和控制所需的姿势和状态感测、抓取目标的运动规划方法、运动或交互任务期间的反馈控制方法以及此类系统的地面测试试验台相关的工作。该研究主题包括五篇文章。在《从空气轴承支撑的测试数据估计空间机械手的振动特性》中,李等人从理论和实验上研究了与平面实验测试试验台相关的问题,该试验台使用空气轴承垂直支撑缩放 SMS 并在平面上创建零重力环境。作者指出,空气轴承会影响缩放 SMS 的动力学行为,从而影响其表观关节的刚度和阻尼、固有频率和振动响应。作者提出了一套程序来消除空气轴承的影响,并从电机制动系统的测试数据中识别真实的等效关节刚度和阻尼。识别惯性特性,并使用遗传算法确定等效关节刚度和阻尼。通过消除空气轴承引起的额外惯性,可以估算出机械手的真实振动特性。在《废火箭级在轨机器人抓取:抓取稳定性分析和实验结果》中,Mavrakis 等人研究了废火箭级的抓取,分析了抓取稳定性,并展示了实验结果。提出了一种评估废火箭级机器人抓取稳定性的新方法,该方法基于计算 Apogee Kick Motor 喷嘴的两指抓取的固有刚度矩阵,并将稳定性指标定义为局部接触曲率的函数,材料特性、施加的力和目标质量。稳定性指标是