XiaoMi-AI文件搜索系统
World File Search Systemrrm

试点研究:衡量对坡道资源管理的态度——国家文化的影响
机坪资源管理 (RRM) 是与飞行安全高度相关的航空运输系统的一部分,但迄今为止却被广泛忽视。组织、国家、专业和安全文化在建立资源管理和培训方面发挥着重要作用。这项初步研究基于 Geert Hofstede 的价值观调查模块,评估了国家文化对 RRM 态度的影响。对该调查模块进行了稍微修改的版本,并分发给德国的机坪人员,并生成了国家文化指数。单向方差分析显示,虽然可以得出国家文化对 RRM 有一定影响的结论,但大多数结果并不具有统计学意义(临界 p 值,0.05)。尽管国家文化对机组资源管理的影响被广泛接受,但结果可能表明当前的文化价值观调查工具存在缺陷。显然,这项初步研究表明,需要在 RRM 和文化领域进行进一步研究,以对当前的 RRM 和培训方法进行可靠的评估。

JN0-252的免费问题
c-rrm调谐会自动发生。d- rrm调整是您每天必须启动的手动过程。实时评估:Juniper Mist的无线电资源管理(RRM)基于实时网络评估来构建渠道计划。它可以动态地适应RF环境中的变化条件,从而通过不断监视干扰,客户分布和使用模式等因素来确保最佳性能。自动调整:RRM调整会自动发生。MIST AI利用强化学习在无需手动干预,调整频道,功率水平和其他参数的情况下不断优化RF设置,以保持最佳的网络性能。

重新利用哺乳动物的RNA结合蛋白musashi
摘要RNA识别基序(RRM)是自然界中最常见的RNA结合蛋白结构域。然而,含RRM的蛋白质仅在真核门中普遍存在,它们在其中扮演中心的调节作用。在这里,我们设计了一种与哺乳动物RNA结合蛋白Musashi-1的大肠菌中基因表达的正交后转录控制系统,该系统是具有神经发育作用的干细胞标记物,其中包含两个规范的RRM。在电路中,由于与Messenger RNA的N末端编码区域的特定相互作用及其对脂肪酸的反应,因此在转录中受到转录调节,并作为变构翻译阻遏物。我们通过评估一系列RNA突变体的体外结合动力学和体内功能,完全表征了种群和单细胞水平的遗传系统和单细胞水平,显示了报告基因表达的显着折叠变化以及潜在的分子机制。通过自下而上的数学模型很好地概括了系统的动态响应。此外,我们应用了用Musashi-1设计的转录后机制来特异性调节操纵子内的基因,实施组合调节并减少蛋白质表达噪声。这项工作说明了如何将基于RRM的调节适应简单的生物,从而在原核生物中添加了用于翻译控制的新调节层。

SPIE的会议录
硅环谐振器调制器(RRMS)具有减少足迹和功耗并增加波长多路复用(WDM)发射器的调制速度的巨大潜力。但是,RRM的光学特性对制造变化高度敏感,这使它们在设计量生产或大量WDM通道方面具有挑战性。在这项工作中,我们提供了一种RRM设计,该设计经过专门设计和实验验证,以降低对制造变化的敏感性。这包括对抗性过度和不足的暴露(±30 nm横向偏差)的敏感性分析以及耦合部分内蚀刻深度变化(±10 nm深度变化)的敏感性分析。对于我们的设计,偏离目标耦合强度的偏差将两倍提高。使用标准的CMOS兼容过程在Soi晶圆上制造了提议的设备。我们演示了以上灭绝比以上的RRM,OMA更好,即-7 dB(2 V pp)和29 GHz的电光带宽,仅在32 GB/s下显示仅受我们的测量设置的开放式眼睛图。测得的耦合系数与模拟值非常吻合。此外,我们应用了相同的设计修改来实现低掺杂的RRM和基于环的添加 - 滴滴 - 磁材(OADMS)。模拟和测量的耦合系数之间的一致性(我们确定为设备性能可变性的主要来源),进一步证实了我们的设计修改的有效性。这些结果表明,可以利用所提出的设计,以大规模地,尤其是在WDM系统中的大规模制造基于谐振的设备。
无线电资源管理的离线和分配强化学习
摘要 - 预言学习(RL)已被证明在未来的智能无线网络中起着有希望的作用。在线RL已用于无线电资源管理(RRM),接管了传统计划。但是,由于依靠与环境的在线互动,其作用在在线互动不可行的实际,现实世界中受到限制。此外,在现实世界随机环境中的不确定性和风险面前,传统的RL在不确定性和风险面前处于短缺状态。以这种方式,我们为RRM问题提出了一个离线和分配RL方案,可以使用静态数据集启用离线培训,而无需与环境相互作用,并使用退货的分布来考虑不确定性的来源。仿真结果表明,所提出的方案的表现优于常规资源管理模型。此外,这是唯一超过在线RL的方案,比在线RL增长10%。索引术语 - 分布强化学习,离线强化学习,无线电资源管理

推出搭载 AI 的云管理无线局域网“MIST”
• 为 802.11、e、k、r、u、v、w、ac 等主要标准的制定做出了贡献(100 多项专利) • 开发了业界首个无线局域网控制器和 RRM(无线资源管理)功能 • 部分开发团队参与了无线局域网行业使用的 70% 的代码

brkewn-3413
字段名称描述发送广播组ID IP地址的无线电标识符插槽ID和发件人的优先级代码WLC HASH RF组名称转换为身份验证IP地址的Hash,已加密发送AP的RRM组领导者的IP地址?我们是否正在使用加密的NDP?版本的NDP APS频道发送无线电的操作渠道

技术目录2021
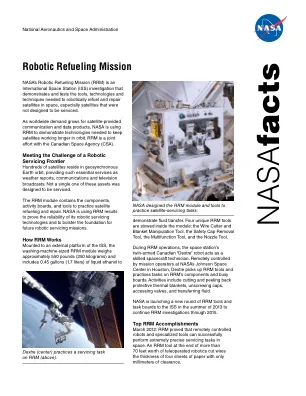
a)脚踩在空间站远程操作机器人的机器人手臂上,宇航员Mike Fossum在太空站的机器人手臂上限制了脚步,将机器人加油任务(RRM)有效载荷转移到了太空行走期间。b)OSAM-1的机器人维修臂(从上方)的抓斗测试模拟了在马里兰州格林贝尔特NASA的Goddard太空飞行中心的机器人操作中心中捕获自主卫星的照明条件。c)大型望远镜(例如14m分段辐射计)的精确空间组装表明,OSAM技术有望避免整流罩大小的物理局限性,并在对地球和太空科学方面的敏感性方面取得了重大进步。d)合作服务阀(CSV)的设计旨在促进轨道上的远距离抗原供应,这些推进剂和压力机将延长太空飞行资产的寿命。