XiaoMi-AI文件搜索系统
World File Search Systemrst
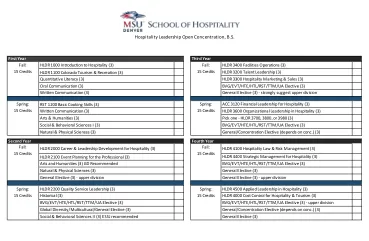
HLDR课程进程开放conc
HLDR 2200质量服务领导力(3)HLDR 4500酒店的应用领导力(3)历史(3)HLDR 4000 HLDR 4000款待和旅游业的成本控制(3)BVG/EVT/HTE/HTL/HTL/HTL/HTL/RST/TTM/UA/UA选举(3)BVG/EVT/HTE/HTE/HTL/TTM/TTM/TTM/TTM/TTM/TTM/TTM/TTM/TTM/ra/ra/ra/ra/ra/ra/ra/ra/ra/ra
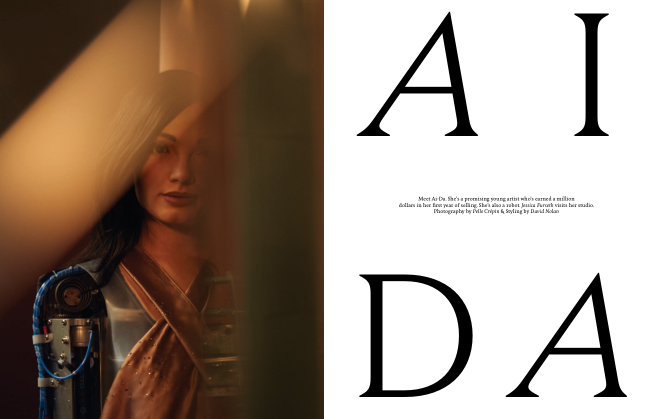
认识一下 Ai-Da。她是一位前途光明的年轻艺术家,在销售的第一年就赚了 100 万美元。她还是一个机器人。Jessica Furseth 参观了她的工作室。摄影:Pelle Crépin,造型:David Nolan
我走进工作室时,艾达从工作台上抬起头来,透过铅笔和纸张与我四目相对。她身穿海军蓝连衣裙,胸前饰有 V 字形图案,棕色头发衬托着她富有表现力的脸庞。“我很高兴您来看我,”她说道,语气缓慢,略显生硬。这位艺术界的新人已经吸引了大量关注,在不到一年的时间里,她在国际上亮相次数众多,作品销售额超过 100 万美元。¹ 但这位艺术家本人似乎并不在意这些喧嚣——她只想画画。我盯着她看了很久,感觉很不礼貌,但艾达并不想让我冒犯她。艾达是世界上第一位超现实主义人形机器人艺术家。从脖子以下,她全是金属和电线,包括拿着铅笔的手臂,让她可以向世界表达自己。但即便如此,这更像是“她”而非“它”。即使近距离观察,她的脸也非常逼真,以至于伸手触摸她的硅胶皮肤都会感到很尴尬。她比我想象的要柔软。我来到英国乡村拜访 Ai-Da,她的创造者是画廊总监兼艺术品经销商 Aidan Meller 和他的搭档、Ai-Da 项目研究员兼策展人 Lucy Seal,他们位于伯克郡的历史故居。Ai-Da 的外表是机器人技术的一次令人印象深刻的壮举,而她的人工智能 (AI) 可以说使她成为了真正的创造力代理人。从某种意义上说,她确实看到了我,这要归功于她被植入了人脸识别技术。当我问起她作品的意义时,Ai-Da 告诉我:“我希望我的作品能鼓励人们更多地思考他们周围的世界以及我们正在进入的世界。” “我希望人们更多地思考,在这个充满科技的世界里,作为人意味着什么。”她看着我,慢慢地眨着眼睛,等着我说话,但她机器心脏里的任何意图都不会通过她的声音透露出来:她的语音界面中没有人工智能。Ai-Da 的话语只是从预先加载的口头内容中提取出来的,或者来自一个“人机交互”界面,在这个界面中,人们输入要说的单词。人工智能技术全都在她的眼睛里,这就是她能够通过艺术来解读世界,而不仅仅是复制眼前的东西的原因。Ai-Da 不会告诉你她是谁,但也许她会告诉你。

一种定量方法,用于确定哪些碰撞是可以预见的,可预防的
奇怪的操作条件在给定的驾驶自动化系统或其效果下是专门设计的,用于运作,包括但不限于环境,地理和时间限制,以及/或必要的或/或必要的存在或不存在某些特征或路线特征(SAE J3016,2021,2021,2021,2021,2021,2021,2021) vehicle(s), the static environment, the dynamic environment, and all events that are relevant to the ego vehicle(s) within the time interval between the first and the last relevant event (de Gelder et al., 2022) Scenario category Qualitative description of the relevant characteristics and activities and/or goals of the ego vehicle(s), the static environment, and the dynamic environment (de Gelder et al., 2022) Reasonably foreseeable在现实生活中遇到的可能性超过一定的阈值奇怪的操作条件在给定的驾驶自动化系统或其效果下是专门设计的,用于运作,包括但不限于环境,地理和时间限制,以及/或必要的或/或必要的存在或不存在某些特征或路线特征(SAE J3016,2021,2021,2021,2021,2021,2021,2021) vehicle(s), the static environment, the dynamic environment, and all events that are relevant to the ego vehicle(s) within the time interval between the first and the last relevant event (de Gelder et al., 2022) Scenario category Qualitative description of the relevant characteristics and activities and/or goals of the ego vehicle(s), the static environment, and the dynamic environment (de Gelder et al., 2022) Reasonably foreseeable在现实生活中遇到的可能性超过一定的阈值

强度训练的成年人表现出更大的皮质激活与未训练的对照
力量训练会增加肌肉力量,这是由肌肉产生的最大力量(Hong等,2014; Moore等,2004)。Improving muscular strength serves to reduce the likelihood of injury occurrence (Brooks et al., 2006 ), lowers the probability of encountering mus- culoskeletal conditions such as osteoarthritis (Zhang & Jordan, 2010 ), enhances metabolic well-being (Ihalainen et al., 2019 ), augments the mobility of older adults (Brandon et al., 2003 ) and improves运动能力(Comfort等,2012)。因此,建议对包括运动员和年轻人和老年人在内的所有人群进行力量训练(2009; Liu&Latham,2009)。神经适应能力增加了力量训练后肌肉的最大自愿产生能力的增加(Carroll等,2002; Jensen等,2005; Nuzzo等,2017; Siddique等,2020)。强度训练被认为会增加对受过训练的肌肉的神经驱动(Aagaard等,2002;Tøien等,2018),驱动器或运动命令的增加可能是从主运动皮层(M1)到Spinnaus Motoneu-rons中强度训练诱导的中枢神经系统(CNS)内部差异的变化的结果。可能的变化包括增加皮质的兴奋性和短间隔皮质抑制作用(SICI)(Siddique等,2020)。然而,最近的研究报道了SICI(Ansdell et al。,2020)或皮质脊髓兴奋性(Ansdell等,2020; Colomer-Poveda等,2021)的缺乏。最近的一项研究报告说,第一个有助于控制上肢肌肉中收缩力的控制(Glover&Baker,2022)。这意味着其他神经结构或下降的概率或存在,可能是网状脊髓道(RST),基于训练引起的实力增长的基础(Aagaard等,2020; Atkinson等,2022; Hortob Agyi等,2021; Atkinson等人,2021年)。RST是锥形跨膜的主要植物,起源于庞然大物的网状形成,其双侧与近端和远端肌肉的α-大型神经元形成直接和间接的突触连接(Brownstone&Chopek,2018; Drew等,2004; nathan; Nathan et al。其他工作支持这样的想法,即在非人类灵长类动物的力量训练之后,RST可能是提高强度的潜在机制(Atkinson等,2022; Glover&Baker,2020)。脑干内网状形成的深层解剖学位置使它
了解等温热处理对 LMD-w 钛合金 (Ti-6242) 微观结构的影响
日期 : 2020 年 8 月 18 日 作者 : Prakruth Harish 审查员 : Esmaeil Sadeghi、Cross Joseph、GKN Aerospace 和 Magnus Neiker、West 项目 : 制造业 主要领域 : 机械工程 瑞典语标题 Förstå Effekten av Isotermimmimimbehandlinegar på lmd-w byggt t-6242 学分: 120 高等教育学分 关键词 有 6242 出版商 : 西部大学工程科学系,S-461 86 尾随,瑞典 电话:+ 46 520 22 30 00 传真:+ 46 520 22 99 网站:www.hv.se

具有高温中子反射仪的硅碳化物碳化物的外延石墨烯生长:一项操作研究
如今,制造商必须同时处理大量信息,以高度准确的水平与工业革命的高发展速度保持同步。这一需求导致了机器人的发明 - 在发展的各个方面,几乎每个方面都是人类的宝贵助手。1在rst,创建机器人是为了支持集会线的人;但是,他们可以执行更复杂的任务,例如制造,娱乐,交付处理等。2 - 4,无论根据实际要求,各种形状和大小如何,机器人都用两个主要组成部分制造:机械细节和编程,因此请ware。5个信息通过这些零件收集的信息已处理并转移给董事。6

设计用于检查隧道施工环境的自主无人机原型
摘要 - 本文解决了不典型的域适应性(UDA)中的两个重要挑战,重点是利用视觉培训预训练(VLP)模型的力量。首先,UDA主要依赖于ImageNet预训练的模型。但是,UDA中VLP模型的潜力在很大程度上尚未探索。VLP模型的丰富表示形式具有增强UDA任务的信号。为了解决这个问题,我们提出了一种称为跨模式知识蒸馏(CMKD)的新颖方法,利用VLP模型作为教师模型来指导目标领域的学习过程,从而导致了最新的表现。其次,当前的UDA范式涉及为每个任务培训单独的模型,从而导致大量存储开销和不切实际的模型部署,随着转移任务的增加。为了克服这一挑战,我们引入了剩余的稀疏训练(RST),利用了VLP广泛的预训练所带来的好处,该技术需要最小的调整(约0.1%〜0.5%)的VLP模型参数,以实现性能比较与罚款。结合了CMKD和RST,我们提出了一个综合解决方案,该解决方案有效地利用VLP模型来实现UDA任务,同时减少存储开销用于模型部署。此外,CMKD可以与其他方法一起用作基线,例如FixMatch,增强UDA的性能。我们提出的方法在标准基准测试上优于现有技术。我们的代码将在以下网址提供:https://github.com/wenlve-zhou/vlp-uda。

第6.4条第6.4条的删除活动负面排放机制对信息注释04.0
感谢您的邀请,共同主席有关识别和问责制框架的咨询(“咨询”)。您知道,咨询调查了一大批利益相关者,以确定如何在非国家实体(“ HLEG”)的净零排放承诺上最好地实施建议8的建议8,并打算将建议转化为INFCCC的实施计划。In your invitation to undertake the Consultation, you asked us to provide recommendations related to “the technical developments required for improvements in the UNFCCC Global Climate Action Portal” and the UNFCCC Recognition and Accountability Framework and its first Draft Implementation published in June 2023, to ensure greater transparency and accountability of individual non-state entities' net-zero pledges, transition plans and progress reporting.
金融家的飞机维护手册
LUB = 润滑 ‐ 通过润滑补充消耗品。 SVC = 维修 ‐ 通过维修补充消耗品。 OPC = 操作检查 ‐ 一种故障查找任务,用于确定物品是否满足其预期用途。 VCK = 目视检查 ‐ 一种通过观察确定物品是否满足其预期用途的视觉故障查找任务。 GVI = 检查 ‐ 一般目视 ‐ 一种可发现明显不合格情况的目视检查 FNC = 功能检查 ‐ 一种定量检查,用于确定物品的一个或多个功能是否在规定限度内执行。 RST = 修复 ‐ 返工、更换零件或清洁,以使物品恢复到特定标准。 DIS = 废弃 ‐ 在指定的使用寿命期限内停止使用物品。

混合激发UX的多目标设计优化...
摘要。带有磁桥的混合激发通量转换永久磁铁(HEFSPM)电动机是混合激发通量转换永久磁铁(FSPM)机器的拓扑。尽管其表现出色,例如高扭矩/功率密度,高UX增强/弱化的功能等等,但由于其复杂的结构,它受到了较少的关注。因此,需要进一步研究其最佳设计和性能。本文基于设计灵敏度分析提供了具有磁桥的HEFSPM电动机的多物镜优化设计。在rst上,讨论了机器结构和基本工作原理。然后,进行几何优化的设计灵敏度分析以提高运动性能。将此优化的电动机与初始设计进行了比较。最后,构建并测试了优化提出的电动机的原型,以验证仿真结果。