XiaoMi-AI文件搜索系统
World File Search Systemsinusoidal
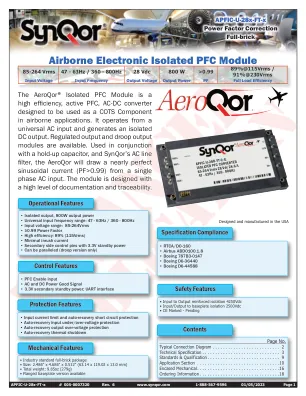
机载电子隔离 PFC 模块 - SynQor
APFICQor 隔离功率因数校正模块是一种高效、高功率 AC-DC 转换器。它通过通用 AC 输入产生隔离 DC 输出电压。提供稳压和半稳压(下垂版本)模块。如图 A 所示,典型的电源由 SynQor AeroQor AC 线路滤波器、SynQor APFICQor 模块和储能保持电容器组成。需要保险丝来满足监管安全要求。APFICQor 的主要目的之一是将从单相正弦 AC 源吸取的输入电流整形为近乎完美的正弦波形,以便 AC-DC 电源将为该源提供非常高的功率因数负载。在进行波形整形时,APFICQor 可确保交流电流波形的谐波分量低于测试标准所要求的水平。交流电流波形的总谐波失真在满载时通常小于 3%。APFICQor 首先通过以下方式完成波形整形任务

单相脉冲宽度调制逆变器设计与
大多数现代机器,包括风扇和空调,都是由交流电供电的。必须有一种可靠的方法将直流电转换为交流电,而不会留下任何交流电。为逆变器供电的电子电路完成了这一改进。将直流输入电压转换为具有理想幅度和频率的修改后的交流输出电压是电源逆变器的主要任务。PWM 方法(称为正弦 PWM)被广泛使用。在高频三端传输波逐渐决定逆变器中每个轴的切换状态之前,在此 PWM 方法中比较正弦交流电压参考。逆变器经常用于现代应用,例如变速交流发动机、入伍加热、备用电源和不间断电源。可以一般分类的两种主要逆变器类型是单级和三级逆变器。每种类型都可以使用具有受控开/关操作的设备。为了提供交流输出信号,这些逆变器通常使用节拍宽度平衡控制信号。


IB 人工智能 SL
2.1 线性函数与图形 2.1.1 直线方程 2.2 进一步的函数与图形 2.2.1 函数 2.2.2 绘制函数 2.2.3 图形的性质 2.3 函数建模 2.3.1 线性与分段模型 2.3.2 二次与三次模型 2.3.3 指数模型 2.3.4 正变化与反变化 2.3.5 正弦模型 2.3.6 函数建模策略

基于深度强化学习的控制器设计...
在本研究中,将深度确定性策略梯度 (DDPG) 算法(该算法由人工神经网络和强化学习组成)应用于垂直起飞和着陆 (VTOL) 系统模型以控制俯仰角。之所以选择该算法,是因为传统控制算法(例如比例-积分-微分 (PID) 控制器)无法始终生成合适的控制信号来消除干扰和不必要的环境对所考虑系统的影响。为了控制该系统,在 Simulink 环境中对 VTOL 系统数学模型中的正弦参考进行训练,通过深度强化学习方法中具有连续动作空间的 DDPG 算法,该算法可以产生控制动作值,这些动作值采用能够根据确定的奖励函数最大化奖励的结构,以实现控制目的和人工神经网络的泛化能力。对于正弦参考和恒定参考,将俯仰角(指定 VTOL 系统的输出)的跟踪误差性能与传统 PID 控制器在均方误差、积分平方误差、积分绝对误差、百分比超调和稳定时间方面的性能进行了比较。通过模拟研究给出了得到的结果。
EE2003 / EE2003A / EE2003B
目标 1. 介绍基本类型的半导体电子器件和电路的操作和分析所使用的原理和技术,包括二极管和二极管电路、双极结型晶体管 (BJT) 和 BJT 放大器、金属氧化物半导体场效应晶体管 (MOSFET) 和 MOSFET 放大器以及运算放大器 (op-amps) 和运算放大器电路。 2. 介绍对具有正弦驱动源的一阶交流电路进行频域分析所使用的原理和技术。

4800紧凑型电池循环
NHR 4800是一种高度高的电池循环仪,能够在4U底盘中提供高功率性能。多功能电池循环器还可以作为DC源,直流负载,电池模拟器和放大器,用于电源级硬件(PHIL)测试。NHR 4800在一个单元中提供高达80VDC和400A,同时提供可扩展的功率,范围从16.5kW到165kW。完全集成的电池循环器包括隔离接触器继电器,预电路电路和反向极性检查器。除了电池循环(采购和加载)外,4800还包括多种其他操作模式,包括内置的电池循环轮廓控制器,任意配置文件(XY和MACROS),DC上的Sinusoidal,最大功率点跟踪(MPPT)等。电池仿真模式允许对电池或其他双向直流总线进行准确的仿真测试应用,以使用电池,例如动力总成和推进,EV快速充电等。Phil功能提供了其他测试功能,这些功能在研究应用中尤其需要。具有集成安全功能的多功能系统可以替代研究,验证和生产环境中的多种仪器。NHR 4800可以通过集成触摸面板或Labview和Python中的SCPI命令进行操作。
AML 步进电机的漏磁场
在操作过程中,磁场由步进频率的交变场调制。由于多种原因,这通常不如稳定场那么重要。步进频率场的幅度随着步进频率的增加而减小,并且仅在几百赫兹以下与稳定场相当。在低步进速率下,出于机械原因,使用微步进是正常的,微步进会产生正弦磁通波形。在几百赫兹以上,使用全步进驱动是正常的,全步进驱动试图产生矩形磁通波形。然而,绕组电感的滤波作用逐渐降低了几百赫兹以上场的所有频率分量的幅度,因此,步进频率下的漏磁场的交变分量在所有实际用途中都可以被视为正弦波。大多数现代步进电机驱动器通过开关动作实现绕组中的电流调节,这也会调节磁漏场。与场的稳定和步进频率分量相比,漏磁场的幅度通常非常小,通常小于 10%。在大多数情况下,切换在每步之后的前几毫秒内被禁用,因此在步进速率高于 500 Hz 时根本不存在切换。步进电机在 500 Hz 和 1 kHz 步进速率之间实现其最大机电效率,并且设计电动真空机构以在这些速率下旋转是标准做法,以尽量减少总能量输入,从而减少排气。幸运的是,这还可以减少漏磁通的交变分量。

DriveIT ACS 1000 - 用于速度和...的中压交流驱动器
ACS 1000 针对改造进行了优化。由于其占用空间小且输入隔离变压器灵活,该驱动器可以安装在您需要的任何位置。其增强的电机识别程序通过自动确定所有关键电机参数简化了启动过程 - 只需输入电机铭牌数据,ACS 1000 就会完成其余所有工作。由于输出波形完美为正弦波,现有的异步电机无需降额即可使用。该设计还确保电机不会受到有害的共模电压的影响。这意味着不需要特殊的电机绝缘。