XiaoMi-AI文件搜索系统
World File Search Systemsubbottom
附录I-B调查设备清单
Geophysical survey instruments may include side scan sonar (SSS), multibeam echosounders (MBES), magnetometers/gradiometers, shallow (parametric subbottom) and medium (sparker) penetration single or multi-channel subbottom/seismic profilers, and all support systems (e.g., positioning, motion sensor, compass, sound velocity profiler [SVP]) as以及高分辨率的视觉成像系统(例如,水下摄像头)和被动声监测(PAM)系统。要使用的行业标准调查等级系统包括但不限于以下系统(或同等学历):
降低人为...
摘要:HELCOM波罗的海行动计划的最新更新迫切需要审查水下噪声的主要来源,它们已知的以及可能对海洋环境的影响以及减轻影响的可能方法。冲动的噪声源(桩驾驶,地震调查,水下爆炸,低频声纳等)在海洋哺乳动物和鱼类中会引起负面影响。缓解包括:a)降低产生的噪声(源修改),b)辐射噪声(减排)和c)减少接收的噪声(敏感区域和周期的活动限制,撞击之前对危险区域的威慑力)。连续的低频噪声主要由商业容器和休闲划船产生,并从近海基础设施(石油和天然气,可再生能源)产生了额外的贡献。缓解措施主要是源修改(改进设计和操作程序/降低速度)和时间/面积限制(包括区域/局部速度限制和/或船舶要求遵守特定噪声排放标准的要求)。目前未监控的其他来源包括回声器和高频声纳,净ping和密封恐怖片以及空气枪以外的设备,用于探索海床的最高层(Subbottom分析和测量)。
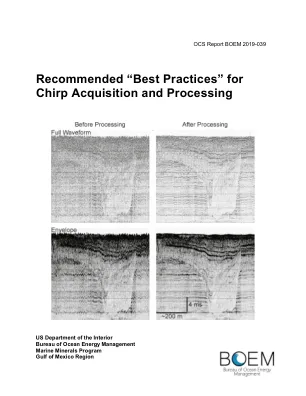
推荐CHIRP获取和处理的“最佳实践”
chirp声音反射系统,有时称为子底剖面,是对海底或湖床下沉积物的超高分辨率(〜十分尺度)成像的宝贵工具。chirp是一种由雷达社区开发的信号处理技术,用于改善回声回报的分辨率(Klauder等,1960)。该技术后来由声纳社区改编(Schock等,1989)。CHIRP信号是一种扫描的频率脉冲,通常在5-30毫秒(MS)之间,其频率在0.5 kHz到24 kHz之间,具体取决于传感器。CHIRP信号处理的基本特征是匹配过滤器(即应用反向卷积),带有已知的即将脉冲函数的返回信号,从理论上讲,该信号将从较长且复杂的声纳脉冲中崩溃,从近距离突击的响应中崩溃。chirp数据是在及时获得的,其中z轴是从chirp到反射器(具有声音响应的海底或更深层的层)的行程,然后返回chirp(双向时间或TWT)。一些CHIRP采集系统会根据水中假定的声速自动显示具有深度Z轴的数据(例如,每秒1500米);但是,记录的数据始终在TWT中。 水平轴是基于每个声纳ping的GPS导航,将其转换为沿调查轨道的距离。每秒1500米);但是,记录的数据始终在TWT中。水平轴是基于每个声纳ping的GPS导航,将其转换为沿调查轨道的距离。